直线转换装置的制作方法
1.本实用新型涉及一种转换装置,尤其与机器人抓取转换装置有关。
背景技术:
2.随着机器人应用于冶金行业原辅材料检测试验领域的日益推广,应用机器人抓取试样料盘实现检测试验工序间转运的事例日渐增多,但由于机器人抓取臂回转直径的限制,不同检测试验工艺流程及系统间的试样转运存在困难,迫切需要一种适应不同检测试验系统机器人抓取的转换装置来实现。
技术实现要素:
3.本实用新型的目的是提供一种结构合理、工作可靠、能适应不同检测试验系统机器人抓取的直线转换装置。
4.为达到上述目的,本实用新型是通过以下技术方案实现的。直线转换装置,它包括机架、直线模组、精密转台、转台固定板、托盘、料盘、感应器座、光电感应器及plc控制系统,直线模组固定在机架上,精密转台通过转台固定板固定在直线模组上,托盘固定在精密转台上,料盘设于托盘上,感应器座固定在机架上,并分别设于直线模组两端,光电感应器设于感应器座上,料盘外端设有机器人抓取夹头,直线模组、精密转台及光电感应器分别与plc控制系统相连接。
5.所述的直线转换装置,在托盘上设有定位块,定位块设于托盘周边。
6.所述的直线转换装置,它还包括机罩,机罩设于机架上,机罩将直线模组、精密转台、转台固定板、托盘、料盘、感应器座及光电感应器罩住。
7.本实用新型与现有技术相比具有以下优点:(一)是由于采用plc自动控制,实现从直线输送、旋转、限位的自动控制,大大提高了直线输送及转换效率,满足了不同检测试验系统机器人抓取的要求;(二)是由于在托盘上周边设有定位块,确保机器人抓取料盘的精确可靠;(三)由于设有机罩,可有效避免试样直线输送和转换过程中扬尘,并防止异物掉入直线模组、精密转台及料盘上,确保装置运行安全可靠,保证试样不被污染。
附图说明
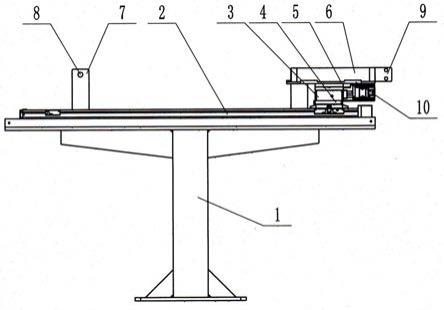
8.图1是本实用新型直线转换装置的主视结构示意图。
9.图2是本实用新型直线转换装置的俯视结构示意图。
10.图3是本实用新型直线转换装置的立体结构示意图。
具体实施方式
11.下面结合附图对本实用新型的实施例作进一步详细的描述。
12.如图1、图2及图3所示,直线转换装置,它包括机架1、直线模组2、精密转台3、转台固定板4、托盘5、料盘6、感应器座7、光电感应器8、机罩11及plc控制系统,直线模组2固定在
机架1上,精密转台3通过转台固定板4固定在直线模组2上,托盘5固定在精密转台3上,料盘6设于托盘5上,感应器座7固定在机架1上,并分别设于直线模组2两端,光电感应器8设于感应器座7上,料盘6外端设有机器人抓取夹头9,直线模组2、精密转台3及光电感应器8分别与plc控制系统相连接,在托盘5上设有定位块10,定位块10设于托盘5周边,机罩11设于机架1上,机罩11将直线模组2、精密转台3、转台固定板4、托盘5、料盘6、感应器座7及光电感应器8罩住。直线模组2为外购件,包括直线导轨、滑块及电机,精密转台3为外购件。
13.以上所述仅为本实用新型的较佳实施例而已,并不用以限制本实用新型,凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
技术特征:
1.一种直线转换装置,其特征在于:它包括机架(1)、直线模组(2)、精密转台(3)、转台固定板(4)、托盘(5)、料盘(6)、感应器座(7)、光电感应器(8)及plc控制系统,直线模组(2)固定在机架(1)上,精密转台(3)通过转台固定板(4)固定在直线模组(2)上,托盘(5)固定在精密转台(3)上,料盘(6)设于托盘(5)上,感应器座(7)固定在机架(1)上,并分别设于直线模组(2)两端,光电感应器(8)设于感应器座(7)上,料盘(6)外端设有机器人抓取夹头(9),直线模组(2)、精密转台(3)及光电感应器(8)分别与plc控制系统相连接。2.根据权利要求1所述的直线转换装置,其特征在于:在托盘(5)上设有定位块(10),定位块(10)设于托盘(5)周边。3.根据权利要求1或2所述的直线转换装置,其特征在于:它还包括机罩(11),机罩(11)设于机架(1)上,机罩(11)将直线模组(2)、精密转台(3)、转台固定板(4)、托盘(5)、料盘(6)、感应器座(7)及光电感应器(8)罩住。
技术总结
本实用新型公开了一种直线转换装置。它包括机架、直线模组、精密转台、转台固定板、托盘、料盘、感应器座、光电感应器及PLC控制系统,直线模组固定在机架上,精密转台通过转台固定板固定在直线模组上,托盘固定在精密转台上,料盘设于托盘上,感应器座固定在机架上,并分别设于直线模组两端,光电感应器设于感应器座上,料盘外端设有机器人抓取夹头,直线模组、精密转台及光电感应器分别与PLC控制系统相连接。本实用新型具有结构合理、工作可靠、能适应不同检测试验系统机器人抓取等特点。不同检测试验系统机器人抓取等特点。不同检测试验系统机器人抓取等特点。
技术研发人员:任小祥 金漪娣 张赵飞
受保护的技术使用者:浙江福特机械制造有限公司
技术研发日:2021.07.04
技术公布日:2022/1/4
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1