一种自动复位的悬臂梁冲击试验机的制作方法
1.本实用新型涉及悬臂梁冲击试验机技术领域,具体为一种自动复位的悬臂梁冲击试验机。
背景技术:
2.悬臂梁冲击试验机是测定非金属材料冲击韧性的设备。悬臂梁冲击试验机是目前市场上使用最普遍的冲击试验机之一,该设备主要用于硬质塑料、增强尼龙、玻璃钢、陶瓷、铸石、电绝缘材料等非金属材料冲击韧性的测定,是化工行业、科研单位、大专院校质量检测等部门理想的试验设备。
3.本实用新型的申请人发现现有的悬臂梁冲击试验机在进行冲击实验室时不具有对摆杆进行自动复位的能力,往往需要手动进行复位,使用操作不方便。
技术实现要素:
4.本实用新型的目的在于提供一种自动复位的悬臂梁冲击试验机,旨在改善现有的悬臂梁冲击试验机在进行冲击实验室时不具有对摆杆进行自动复位的能力的问题。
5.本实用新型是这样实现的:
6.一种自动复位的悬臂梁冲击试验机,包括试验机本体,试验机本体包括底座,底座的上表面靠近后侧固定设置有支撑墙板,且支撑墙板的前侧设置有摆杆,摆杆的上端固定设置有转动杆,转动杆的后端穿过支撑墙板固定设置有齿轮,支撑墙板的后侧固定设置有驱动齿轮转动的复位机构,且复位机构可进行上下方向的移动控制。
7.进一步的,支撑墙板的前侧靠近上端固定设置有电控箱,且电控箱的下端设置有与转动杆转动连接的转动支座。
8.进一步的,摆杆的下端设置有摆锤,底座的上表面固定设置有与摆锤配合的装夹座,底座的下表面设置有均匀分布的支脚。
9.进一步的,支脚包括垫板,垫板的上端固定设置有支撑柱,且支撑柱的上端通过螺纹头旋拧在底座上。
10.进一步的,复位机构包括固定在支撑墙板上的固定板,固定板的上表面固定设置有电动伸缩杆,且电动伸缩杆的顶杆穿过固定板并通过连接块连接有电机,电机的输出轴上固定设置有与齿轮配合的主动齿轮。
11.与现有技术相比,本实用新型的有益效果是:
12.本实用新型中在进行冲击实验时,通过摆杆带动摆锤进行冲击试验,在一次冲击试验完成后,通过控制复位机构向下移动与齿轮进行连接从而驱动转动杆转动带动摆杆复位,从而实现自动复位,无需人为的进行复位,使用操作更加的方便。
附图说明
13.为了更清楚地说明本实用新型实施方式的技术方案,下面将对实施方式中所需要
使用的附图作简单地介绍,应当理解,以下附图仅示出了本实用新型的某些实施例,因此不应被看作是对范围的限定,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他相关的附图。
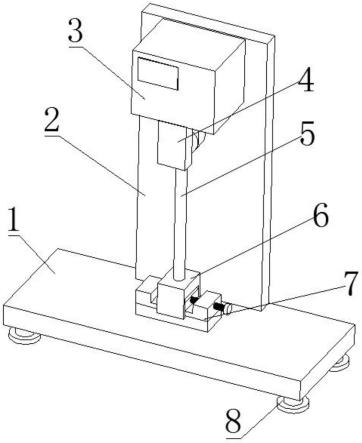
14.图1是本实用新型一种自动复位的悬臂梁冲击试验机的立体图;
15.图2是本实用新型所示的一种自动复位的悬臂梁冲击试验机的摆杆示意图;
16.图3是本实用新型所示的一种自动复位的悬臂梁冲击试验机的支脚示意图;
17.图4是本实用新型所示的一种自动复位的悬臂梁冲击试验机的复位机构示意图。
18.图中:1、底座;2、支撑墙板;3、控制箱;4、转动支座; 5、摆杆;51、连接套;52、转动杆;53、齿轮;6、摆锤;7、装夹座;8、支脚;81、垫板;82、支撑柱;83、螺纹头;9、复位机构;91、电机;92、固定板;93、电动伸缩杆;94、连接块;95、主动齿轮。
具体实施方式
19.为使本实用新型实施方式的目的、技术方案和优点更加清楚,下面将结合本实用新型实施方式中的附图,对本实用新型实施方式中的技术方案进行清楚、完整地描述,显然,所描述的实施方式是本实用新型一部分实施方式,而不是全部的实施方式。基于本实用新型中的实施方式,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施方式,都属于本实用新型保护的范围。因此,以下对在附图中提供的本实用新型的实施方式的详细描述并非旨在限制要求保护的本实用新型的范围,而是仅仅表示本实用新型的选定实施方式。
20.实施例1,具体请参照图1、图2和图4所示,一种自动复位的悬臂梁冲击试验机,包括试验机本体,试验机本体包括底座1,底座1的上表面靠近后侧固定设置有支撑墙板2,且支撑墙板2的前侧设置有摆杆5,摆杆5的下端设置有摆锤6,底座 1的上表面固定设置有与摆锤6配合的装夹座7,底座1的下表面设置有均匀分布的支脚8,通过装夹座7对冲击试验样品进行装夹固定,摆杆5的上端固定设置有转动杆51,支撑墙板2的前侧靠近上端固定设置有电控箱3,且电控箱3的下端设置有与转动杆51转动连接的转动支座4,通过电控箱3进行控制时的电动操控,并通过转动支座4与转动杆51进行转动连接,转动杆51的后端穿过支撑墙板2固定设置有齿轮52,支撑墙板2 的后侧固定设置有驱动齿轮52转动的复位机构9,且复位机构 9可进行上下方向的移动控制,在进行冲击实验时,通过摆杆5 带动摆锤6进行冲击试验,在一次冲击试验完成后,通过控制复位机构9向下移动与齿轮52进行连接从而驱动转动杆51转动带动摆杆5复位,从而实现自动复位,无需人为的进行复位,使用操作更加的方便。
21.具体请参照图3所示,支脚8包括垫板81,垫板81的上端固定设置有支撑柱82,且支撑柱82的上端通过螺纹头83旋拧在底座1上,通过垫板81实现放置支撑,通过螺纹头83进行安装固定。
22.具体请参照图4所示,复位机构9包括固定在支撑墙板2 上的固定板92,固定板92的上表面固定设置有电动伸缩杆93,且电动伸缩杆93的顶杆穿过固定板92并通过连接块94连接有电机91,电机91的输出轴上固定设置有与齿轮52配合的主动齿轮95,通过电动伸缩杆93驱动电机91向下移动使得主动齿轮95与齿轮52啮合连接从而实现驱动齿轮52转动。
23.工作原理:在进行冲击实验时,通过电机91驱动主动齿轮 95转动从而实现驱动转
动杆51转动,转动杆51则带动摆杆5 和摆锤6转动至上方完成冲击试验的复位,此时通过电动伸缩杆93驱动电机91向上移动使得主动齿轮95与齿轮52脱离,则摆锤6则会向下摆动进行冲击试验。
24.通过上述设计得到的装置已基本能满足现有的悬臂梁冲击试验机在进行冲击实验室时具有对摆杆进行自动复位的能力的使用,但本着进一步完善其功能的宗旨,设计者对该装置进行了进一步的改良。
25.以上所述仅为本实用新型的优选实施方式而已,并不用于限制本实用新型,对于本领域的技术人员来说,本实用新型可以有各种更改和变化。凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
技术特征:
1.一种自动复位的悬臂梁冲击试验机,包括试验机本体,其特征在于:所述试验机本体包括底座(1),所述底座(1)的上表面靠近后侧固定设置有支撑墙板(2),且支撑墙板(2)的前侧设置有摆杆(5),所述摆杆(5)的上端固定设置有转动杆(51),所述转动杆(51)的后端穿过支撑墙板(2)固定设置有齿轮(52),所述支撑墙板(2)的后侧固定设置有驱动齿轮(52)转动的复位机构(9),且复位机构(9)可进行上下方向的移动控制。2.根据权利要求1所述的一种自动复位的悬臂梁冲击试验机,其特征在于,所述支撑墙板(2)的前侧靠近上端固定设置有电控箱(3),且电控箱(3)的下端设置有与转动杆(51)转动连接的转动支座(4)。3.根据权利要求1所述的一种自动复位的悬臂梁冲击试验机,其特征在于,所述摆杆(5)的下端设置有摆锤(6),所述底座(1)的上表面固定设置有与摆锤(6)配合的装夹座(7),所述底座(1)的下表面设置有均匀分布的支脚(8)。4.根据权利要求3所述的一种自动复位的悬臂梁冲击试验机,其特征在于,所述支脚(8)包括垫板(81),所述垫板(81)的上端固定设置有支撑柱(82),且支撑柱(82)的上端通过螺纹头(83)旋拧在底座(1)上。5.根据权利要求1所述的一种自动复位的悬臂梁冲击试验机,其特征在于,所述复位机构(9)包括固定在支撑墙板(2) 上的固定板(92),所述固定板(92)的上表面固定设置有电动伸缩杆(93),且电动伸缩杆(93)的顶杆穿过固定板(92)并通过连接块(94)连接有电机(91),所述电机(91)的输出轴上固定设置有与齿轮(52)配合的主动齿轮(95)。
技术总结
本实用新型公开了一种自动复位的悬臂梁冲击试验机,包括试验机本体,试验机本体包括底座,底座的上表面靠近后侧固定设置有支撑墙板,且支撑墙板的前侧设置有摆杆,摆杆的上端固定设置有转动杆,转动杆的后端穿过支撑墙板固定设置有齿轮,支撑墙板的后侧固定设置有驱动齿轮转动的复位机构,且复位机构可进行上下方向的移动控制,在进行冲击实验时,通过摆杆带动摆锤进行冲击试验,在一次冲击试验完成后,通过控制复位机构向下移动与齿轮进行连接从而驱动转动杆转动带动摆杆复位,从而实现自动复位,无需人为的进行复位,使用操作更加的方便。方便。方便。
技术研发人员:叶观伦 林显达 陈永达 张坤茂 龙宇峰 宁秋月
受保护的技术使用者:广州市鹏云工程塑料有限公司
技术研发日:2021.12.07
技术公布日:2022/6/13
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1