用于检测LiDAR点云数据异常的方法及相关设备与流程
本发明的实施例涉及信息,更具体地,涉及一种用于检测lidar点云数据异常的方法及相关设备。
背景技术:
1、光检测和测距(light detection and ranging,lidar)系统用于测绘、测量和物体检测以及其它用途。lidar具有许多应用,包括机器人、导航、自动驾驶或其他类似应用。lidar系统发射激光并检测所发射的激光中的反射。通过测量激光的发射和反射激光的检测之间的飞行时间(time-of-flight,tof),可以计算lidar单元和反射激光的物体之间的距离。
2、然而,由于技术的特点,lidar具有在物理上可执行的漏洞。lidar发射并接收从lidar到周围物体的激光。更详细地,特定物体反射来自lidar的激光信号,并且该激光信号返回到lidar中的接收器。攻击者可以将关于lidar距离测量的这一原理应用于漏洞。由于没有考虑攻击威胁,即使是激光信号的攻击,lidar也会接收复制的激光信号。因此,经由攻击而被攻击的lidar点云数据会导致对周围物体的错误识别。在其他威胁下,攻击模型被提出不信任机器学习模型和深度学习模型,通过从lidar中的点云生成对抗性物体以进行物体检测。这些漏洞和攻击模型在自动驾驶中是对驾驶员和行人安全的严重威胁。需要针对lidar的异常检测和入侵检测方法,以提高自动驾驶的安全性。
技术实现思路
1、本申请的实施例提供了一种用于检测lidar点云数据异常的方法及相关设备。该技术方案可以高效地检测异常点。
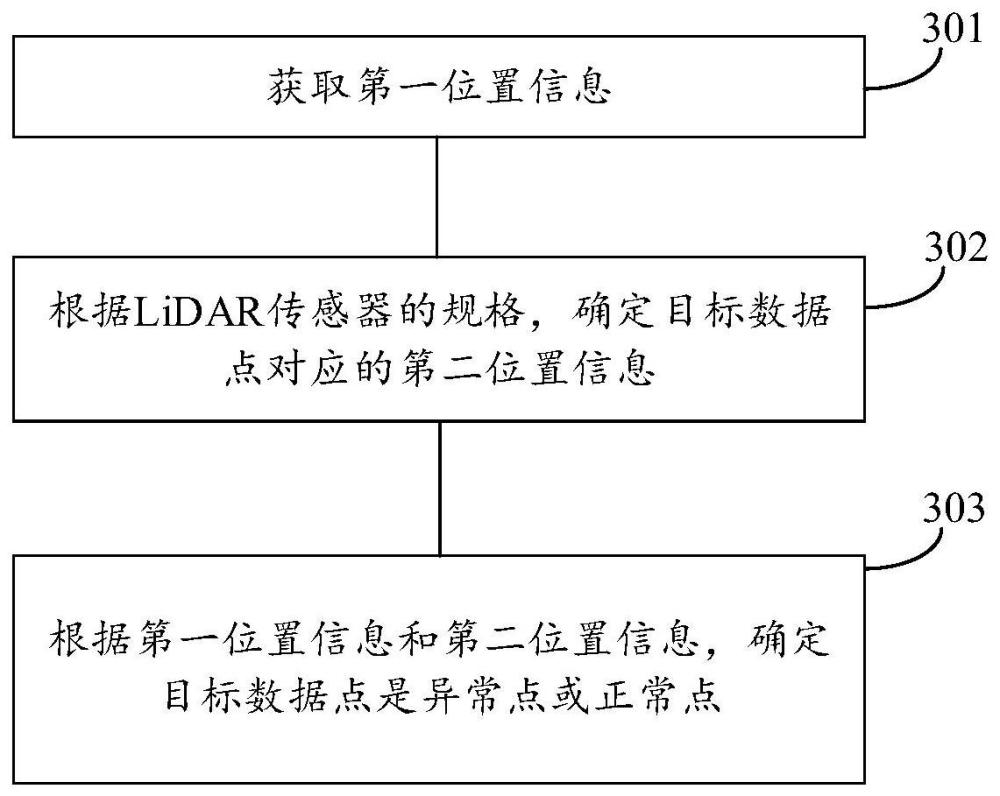
2、根据第一方面,本申请的实施例提供了一种用于检测lidar点云数据异常的方法,其特征在于,包括:获取第一位置信息,其中,所述第一位置信息指示所述lidar点云数据中目标数据点的位置;根据lidar传感器的规格确定所述目标数据点对应的第二位置信息;根据所述第一位置信息和所述第二位置信息确定所述目标数据点是异常点或正常点。
3、攻击者很难知道lidar的所有规格并实时计算所有点。因此,上述技术方案可以高效地检测异常点。此外,在有限体积的交通工具中使用时,上述技术方案可以是一种合适的入侵检测系统,因为相较于其他传感器(例如,相机、gps)输出的检测方法,其具有更低的计算复杂度。
4、在一种可能的设计中,获取所述第一位置信息包括:根据所述目标数据点在笛卡尔坐标系中的坐标,确定所述目标数据点的所述第一位置信息,其中,所述第一位置信息包括所述目标数据点的方位角和所述目标数据点的垂直角。
5、在一种可能的设计中,所述lidar传感器的规格包括:水平角分辨率、发射间隔、所述lidar传感器的通道数量、每个通道的垂直角以及每个通道的水平角偏移;所述根据lidar传感器的规格确定所述目标数据点对应的第二位置信息,包括:根据所述lidar传感器的规格确定多条位置信息,其中,每条位置信息对应数据点,每条所述位置信息包括对应数据点的方位角以及所述对应数据点的垂直角;根据所述第一位置信息从所述多条位置信息中确定所述第二位置信息,其中,所述第二位置信息中包括的方位角与所述第一位置信息中包括的方位角之间的差小于所述多条位置信息中除所述第二位置信息之外的任何一条位置信息中包括的方位角与所述第一位置信息中包括的方位角之间的差,所述第二位置信息中包括的垂直角与所述第一位置信息中包括的垂直角之间的差小于所述多条位置信息中除所述第二位置信息之外的任何一条位置信息中包括的垂直角与所述第一位置信息中包括的垂直角之间的差。
6、在一种可能的设计中,所述根据所述第一位置信息和所述第二位置信息确定所述目标数据点是异常点或正常点,包括:根据所述第一位置信息和所述第二位置信息确定异常分数;根据所述异常分数确定所述目标数据点是所述异常点或所述正常点。
7、在一种可能的设计中,所述根据所述第一位置信息和所述第二位置信息确定异常分数,包括:根据以下公式确定所述异常分数:sanom=|α-αnear|+|ω-ωnear|,sanom是所述异常分数,α是所述第一位置信息中包括的方位角,αnear是所述第二位置信息中包括的方位角,ω是所述第一位置信息中包括的垂直角,并且ωnear是所述第二位置信息中包括的垂直角。
8、在一种可能的设计中,所述根据所述异常分数确定所述目标数据点是所述异常点或所述正常点,包括:当所述异常分数大于或等于预设阈值时,确定所述目标数据点是所述异常点;当所述异常分数小于所述预设阈值时,确定所述目标数据点是所述正常点。
9、根据第二方面,本申请的实施例提供了一种电子设备,所述电子设备具有实现第一方面中所述方法的功能。所述功能可以通过硬件实现,或者可以通过硬件执行相应软件实现。所述软件的硬件包括与所述功能对应的一个或多个模块。
10、根据第三方面,本申请的实施例提供了一种计算机可读存储介质,包括指令。当所述指令在计算机上运行时,所述计算机能够执行第一方面或第一方面的任何可能的实现方式中所述的方法。
11、根据第四方面,提供了一种电子设备,包括处理器和存储器。所述处理器连接到所述存储器。所述存储器用于存储指令,所述处理器用于执行所述指令。当所述处理器执行存储在所述存储器中的所述指令时,所述处理器能够执行第一方面或第一方面的任何可能的实现方式中所述的方法。
12、根据第五方面,提供了一种芯片系统,其中,所述芯片系统包括存储器和处理器,其中,所述存储器用于存储计算机程序,并且所述处理器用于从所述存储器调用所述计算机程序并运行所述计算机程序,使得其上布置有所述芯片的服务器执行第一方面或所述第一方面的任何可能的实现方式中所述的方法。
13、根据第六方面,提供了一种计算机程序产品,其中,当所述计算机程序产品在电子设备上运行时,所述电子设备能够执行第一方面或第一方面的任何可能的实现方式中所述的方法。
技术特征:
1.一种用于检测lidar点云数据异常的方法,其特征在于,包括:
2.根据权利要求1所述的方法,其中,所述获取第一位置信息包括:
3.根据权利要求2所述的方法,其中,所述lidar传感器的规格包括:水平角分辨率、发射间隔、所述lidar传感器的通道数量、每个通道的垂直角以及每个通道的水平角偏移;
4.根据权利要求3所述的方法,其中,所述根据所述第一位置信息和所述第二位置信息确定所述目标数据点是异常点或正常点,包括:
5.根据权利要求4所述的方法,其中,所述根据所述第一位置信息和所述第二位置信息确定异常分数,包括:
6.根据权利要求4或5所述的方法,其中,所述根据所述异常分数确定所述目标数据点是所述异常点或所述正常点,包括:
7.一种电子设备,其特征在于,包括:
8.根据权利要求7所述的电子设备,其中,所述获取模块具体用于:根据所述目标数据点在笛卡尔坐标系中的坐标,确定所述目标数据点的所述第一位置信息,其中,所述第一位置信息包括所述目标数据点的方位角和所述目标数据点的垂直角。
9.根据权利要求8所述的电子设备,其中,所述lidar传感器的规格包括:水平角分辨率、发射间隔、所述lidar传感器的通道数量、每个通道的垂直角以及每个通道的水平角偏移;
10.根据权利要求9所述的电子设备,其中,所述确定模块具体用于:
11.根据权利要求10所述的电子设备,其中,所述确定模块具体用于根据以下公式确定所述异常分数:
12.根据权利要求10或11所述的电子设备,其中,所述确定模块具体用于:
13.一种计算机可读存储介质,其中,所述计算机可读存储介质存储指令,当所述指令在计算机上运行时,所述计算机能够执行根据权利要求1至6中任一项所述的方法。
14.一种电子设备,包括存储器和处理器,其中,所述存储器用于存储计算机程序,并且所述处理器用于从所述存储器调用所述计算机程序并运行所述计算机程序,使得其上布置有所述芯片的计算机执行根据权利要求1至6中任一项所述的方法。
15.一种计算机程序产品,其中,当所述计算机程序产品在计算机上运行时,所述计算机能够执行根据权利要求1至6中任一项所述的方法。
技术总结
本申请实施例提供了一种用于检测LiDAR点云数据异常的方法及相关设备,该方法包括:获取第一位置信息,其中,第一位置信息指示LiDAR点云数据中目标数据点的位置;根据LiDAR传感器的规格确定目标数据点对应的第二位置信息;根据第一位置信息和第二位置信息确定目标数据点是异常点或正常点。上述技术方案可以高效地检测异常点。
技术研发人员:吉瑞沙·师瓦林加帕·瑞瓦帝加,魏卓,姜锡忎,姜宇瑞,李惠在,郭炳江,金惠康,郑成勋
受保护的技术使用者:华为技术有限公司
技术研发日:
技术公布日:2024/3/21
- 还没有人留言评论。精彩留言会获得点赞!