一种基于3D点云的物体厚度测量方法与流程
本发明涉及计算机视觉相关,尤其涉及一种基于3d点云的物体厚 度测量方法。
背景技术:
1、工业生产的质量管理中,测量非常重要,可以从技术上保证生产的标准和 质量。而加工产品中最重要的环节之一就是检测机械零件的尺寸,其检测结果 对产品的质量以及零件的装配与加工都非常重要。
2、当前测量常规零件尺寸的主要手段是利用轮廓仪、激光测量仪或者游标卡 尺等测量工具,不但成本非常昂贵,还存在操作复杂、精度低等缺陷。机器视 觉的发展解决了这些问题,机器视觉在工业上应用领域广阔,核心功能包括: 测量、检测、识别、定位等,并拥有精确度高、速度快、稳定性高等优势。
3、目前绝大多数机器视觉技术都是基于2d图像进行检测的,但是利用2d图 像往往很难检测出物体的厚度,因此需要使用3d视觉技术,3d视觉还处于起 步阶段,许多应用程序都在使用3d表面重构,包括导航、工业检测、逆向工程、 测绘、物体识别、测量与分级等,但精度问题限制了3d视觉在很多场景的应用。
4、现有技术中的测量方法:
5、方案1:将待测量物体放置在基准平面上,利用3d结构光技术生成点云, 在基准平面上拟合平面,计算待检测区域相对于基准平面的段差即为物体厚度。
6、方案2:利用3d结构光技术生成物体上下表面点云数据,在下表面待测量 区域拟合平面,计算上表面待测量区域至该平面的段差即为物体厚度。
7、上述方案的缺点:
8、1、鲁棒性低,数据跳动较大;
9、2、只能测量平坦物体的厚度,无法准确测量翘曲物体的实际厚度。
10、有鉴于上述的缺陷,本设计人积极加以研究创新,以期创设一种基于3d点 云的物体厚度测量方法,使其更具有产业上的利用价值。
技术实现思路
1、为解决上述技术问题,本发明的目的是提供一种基于3d点云的物体厚度测 量方法。
2、为实现上述目的,本发明采用如下技术方案:
3、一种基于3d点云的物体厚度测量方法,依次包括以下步骤:
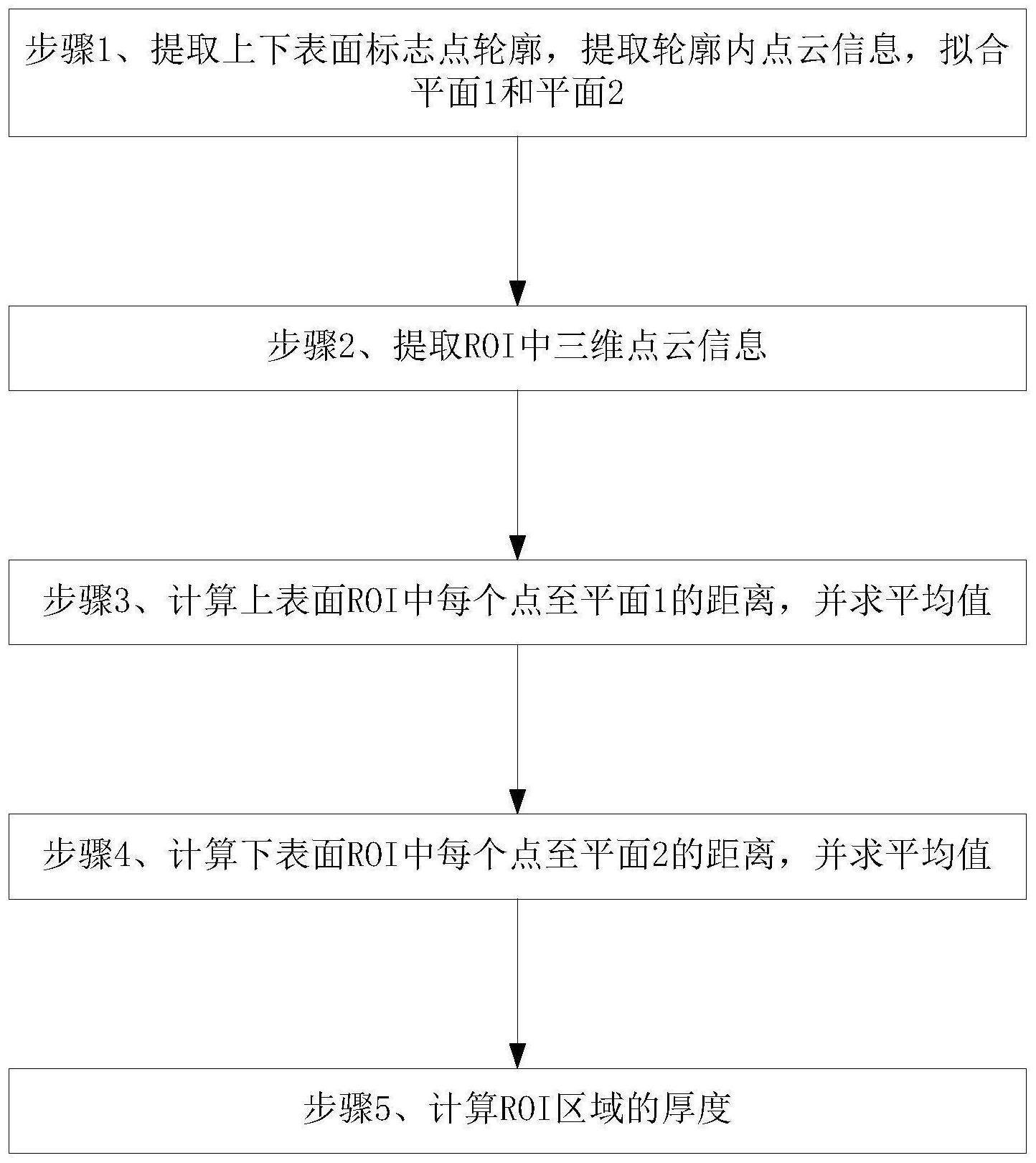
4、步骤1、已知标志点的厚度为d0,提取物体上表面和下表面的标志点轮廓, 提取上表面和下表面的标志点轮廓内的三维点云信息,并利用上表面和下表面 标志点点云信息分别拟合平面,即为平面1和平面2;
5、步骤2、在测量厚度的区域设置roi,并提取roi中的三维点云信息;
6、步骤3、计算上表面roi中每个点至平面1的距离,并求平均值为d1;
7、步骤4、计算下表面roi中每个点至平面2的距离,并求平均值为d2;
8、步骤5、根据公式d=d0+d1-d2,d即为roi区域的厚度。
9、作为本发明的进一步改进,步骤1中,通过bolb分析算法提取物体上表 面和下表面的标志点轮廓。
10、作为本发明的进一步改进,步骤3中,若目标roi区域在平面1上方,则 d1为正,否则为负。
11、作为本发明的进一步改进,步骤4中,若目标roi区域在平面2上方,则 d2为正,否则为负。
12、借由上述方案,本发明至少具有以下优点:
13、1、本发明可以准确测量翘曲物体的实际厚度;
14、2、本发明可以增加系统测量的鲁棒性,减小数据跳动。
15、上述说明仅是本发明技术方案的概述,为了能够更清楚了解本发明的技术 手段,并可依照说明书的内容予以实施,以下以本发明的较佳实施例并配合附 图详细说明如后。
技术特征:
1.一种基于3d点云的物体厚度测量方法,其特征在于,依次包括以下步骤:
2.如权利要求1所述的一种基于3d点云的物体厚度测量方法,其特征在于,所述步骤1中,通过bolb分析算法提取物体上表面和下表面的标志点轮廓。
3.如权利要求1所述的一种基于3d点云的物体厚度测量方法,其特征在于,所述步骤3中,若目标roi区域在平面1上方,则d1为正,否则为负。
4.如权利要求1所述的一种基于3d点云的物体厚度测量方法,其特征在于,所述步骤4中,若目标roi区域在平面2上方,则d2为正,否则为负。
技术总结
本发明涉及一种基于3D点云的物体厚度测量方法,依次包括以下步骤:步骤1、提取物体上表面和下表面的标志点轮廓,提取上表面和下表面的标志点轮廓内的三维点云信息,并利用上表面和下表面标志点点云信息分别拟合平面,即为平面1和平面2;步骤2、在测量厚度的区域设置ROI,并提取ROI中的三维点云信息;步骤3、计算上表面ROI中每个点至平面1的距离,并求平均值为d1;步骤4、计算下表面ROI中每个点至平面2的距离,并求平均值为d2;步骤5、根据公式d=d0+d1‑d2,d即为ROI区域的厚度。本发明可以准确测量翘曲物体的实际厚度;本发明可以增加系统测量的鲁棒性,减小数据跳动。
技术研发人员:王磊,周坤,周剑
受保护的技术使用者:苏州深浅优视智能科技有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!