一种光纤陀螺仪标度因数全温误差补偿方法与流程
1.本发明属于光纤陀螺仪技术领域,尤其是一种光纤陀螺仪标度因数全温误差补偿方法。
背景技术:
2.光纤陀螺仪是惯性导航技术的重要组成部件,其动态测量误差直接关联惯性导航技术精度,其中标度因数的稳定性是该误差因素中的主要构成,它与光纤陀螺仪的零偏稳定性一样,受外界温度变化的影响较大。
3.目前,光纤陀螺仪标度因数的全温误差补偿通常采用一次项分段补偿方法,该方法对中低精度应用需求的光纤陀螺仪简单有效。随着光纤陀螺仪技术的不断革新、成熟,相继研发出高精度光纤陀螺仪并开始实际工程应用,但现有光纤陀螺仪标度因数全温误差一次项分段补偿方法已不能满足高精度光纤陀螺仪的应用要求。因此,如何在全温范围内进行高精度光纤陀螺仪标度因数补偿是目前迫切需要解决的问题。
技术实现要素:
4.本发明的目的在于克服现有技术的不足,提供一种光纤陀螺仪标度因数全温误差补偿方法,解决现有光纤陀螺仪标度因数全温误差一次项分多段补偿的不足,实现高精度光纤陀螺仪标度因数全温误差补偿功能。
5.本发明解决现有的技术问题是采取以下技术方案实现的:
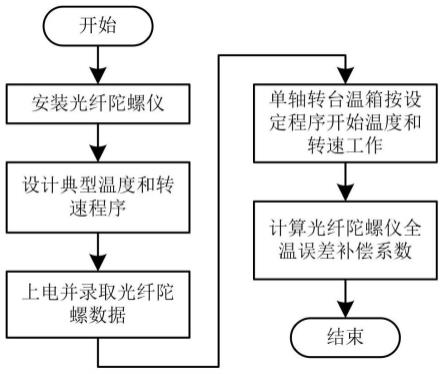
6.一种光纤陀螺仪标度因数全温误差补偿方法,包括以下步骤:
7.步骤1、将光纤陀螺仪固定在单轴转台温箱内;
8.步骤2、根据光纤陀螺仪使用条件,在单轴转台温箱控制程序内设计不同典型温度条件下的典型旋转速率方案;
9.步骤3、单轴转台温箱按设定的温度和转速工作,实时录取光纤陀螺仪的输出数据;
10.步骤4、根据光纤陀螺仪的输出数据,计算光纤陀螺仪全温误差补偿系数,并通过构建光纤陀螺仪标度因数随温度变化模型完成光纤陀螺仪标度因数全温误差补偿。
11.而且,所述单轴转台温箱的全温范围是:-40℃~+60℃。
12.而且,所述步骤3光纤陀螺仪的输出数据为脉冲数。
13.而且,所述步骤4的具体实现方法为:
14.首先按下式计算光纤陀螺仪全温误差补偿系数x:
15.[0016][0017]
然后将光纤陀螺仪全温误差补偿系数代入如下光纤陀螺仪标度因数随温度变化模型,完成光纤陀螺仪标度因数全温误差补偿:
[0018][0019]
其中,k为光纤陀螺仪的标度因数,k0为与特定温度下的标度因数,t是光纤陀螺仪温度值,αi为标度因数误差与第i阶温度的相关系数,m表示误差模型的阶数,βj为标度因数误差与第j阶温度变化速率的相关系数,n表示误差模型的阶数,pusle为光纤陀螺仪不同温度条件下输出的脉冲数。
[0020]
而且,所述误差模型的阶数m取值为3,误差模型的阶数n取值为2。
[0021]
本发明的优点和积极效果是:
[0022]
1、本发明通过单轴转台温箱对光纤陀螺仪施加温度和转速激励,以不同温度、不同转速下的光纤陀螺仪脉冲输出为原始量,以实测温度和转台转速为参数标量,推导出光纤陀螺仪标度因数全温误差多次项补偿模型,将光纤陀螺仪标度因数全温误差由传统补偿方法的100ppm降低到10ppm以内,在很大程度上解决了光纤陀螺仪标度因数在全温范围内(一般为-40℃~+60℃)因温度变化引起的不稳定波动而导致光纤陀螺仪产生测量误差的问题。
[0023]
2、本发明避免了现有不同温度、不同速率分段补偿的环节,可以设置光纤陀螺仪典型工作速率和典型工作温度,一次性连续获取不同转速和不同温度条件下的光纤陀螺仪输出脉冲数,利用矩阵以最小二乘算法估计出最优光纤陀螺仪标度因数误差补偿系数,大大提高了误差补偿精度。
附图说明
[0024]
图1为本发明的里程计参数标定方法流程图。
具体实施方式
[0025]
以下结合附图对本发明实施例做进一步详述。
[0026]
本发明的设计思想是:以温度和转速为参数标量,解算出光纤陀螺仪标度因数的全温误差补偿模型;借助单轴转台温箱对光纤陀螺仪施加温度和转速激励,以不同温度、不同转速下的光纤陀螺仪脉冲输出为原始量,以实测温度和转台转速为参数标量,解算出光纤陀螺仪标度因数全温误差多次项补偿模型。
[0027]
基于上述设计思想,本发明提出一种光纤陀螺仪标度因数全温误差补偿方法,如图1所示,包括以下步骤:
[0028]
步骤1、将光纤陀螺仪固定在单轴转台温箱内。
[0029]
步骤2、根据光纤陀螺仪使用条件,在单轴转台温箱控制程序内设计不同典型温度条件下的典型旋转速率方案。
[0030]
本实施例中,温度设置为-40℃、-20℃、0℃、20℃、40℃、60℃,速率设置为-30
°
/s,-10
°
/s,-5
°
/s,5
°
/s,10
°
/s,30
°
/s。
[0031]
步骤3、单轴转台温箱按设定的温度和转速工作,实时录取光纤陀螺仪的输出数据(脉冲数)。
[0032]
步骤4、根据光纤陀螺仪的输出数据(脉冲数),计算光纤陀螺仪全温误差补偿系数,并通过构建光纤陀螺仪标度因数随温度变化模型完成光纤陀螺仪标度因数全温误差补偿。
[0033]
本步骤的具体实现方法为:
[0034]
根据光纤陀螺仪温度误差机理可知,其标度因数温度误差与温度、温变速率有关,与温度梯度和温度梯度导数无关。因此,光纤陀螺仪标度因数随温度变化模型可表示为
[0035][0036]
式中,k为光纤陀螺仪的标度因数,k0为与特定温度下(一般取25℃)的标度因数,t是光纤陀螺仪温度值,αi为标度因数误差与第i阶温度的相关系数,m表示误差模型的阶数,βj为标度因数误差与第j阶温度变化速率的相关系数,n表示误差模型的阶数,其中温度一阶项是最主要的误差,表示由光纤线圈长度、光纤平均直径、光源平均波长随温度变化产生的线性变化量。根据工程实际应用情况,一般m取值为3,n取值为2。
[0037]
光纤陀螺仪标度因数与转速对应关系如公式(1-2)所示。
[0038]
ω=k
×
pusle
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(1-2)
[0039]
ω为温箱内转台设定的转速,pusle为光纤陀螺仪不同温度条件下输出的脉冲数,k为光纤陀螺仪标度因数。
[0040]
将公式(1-1)代入公式(1-2),再化成矩阵形式
[0041]
[0042]
令x=[1 α
1 α
2 α
3 β
1 β2],
[0043]
公式(1-3)可简化为
[0044]
a=b
×
k0×
x
×cꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(1-4)
[0045]
可解得
[0046][0047]
x即为最小二乘拟合出的光纤陀螺仪全温范围内的最优补偿系数,代入公式(1-1)即完成光纤陀螺仪标度因数全温误差补偿。
[0048]
需要强调的是,本发明所述的实施例是说明性的,而不是限定性的,因此本发明包括并不限于具体实施方式中所述的实施例,凡是由本领域技术人员根据本发明的技术方案得出的其他实施方式,同样属于本发明保护的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1