利用雷达测高数据修正环火轨道递推精度的方法及系统与流程
1.本发明涉及航天器总体设计领域,具体地,涉及一种利用雷达测高数据修正环火轨道递推精度的方法及系统。
背景技术:
2.火星环绕器在完成火星捕获后,成为火星卫星,在环火轨道上进行数次轨道调整进入中继轨道,再进入遥感轨道。在中继轨道上,需完成对巡视器中继通讯任务,数据传回地球,为保证中继弧段对巡视器指向,此阶段需要环绕器具备精确的轨道递推能力。在遥感轨道上,主要是火星遥感类载荷工作,中分相机、高分相机、矿物光谱仪等在高度800km以下时段内对火成像、数据传回地球,此阶段需要环绕器对火指向,为保证对火指向精度,环绕器应具备精确的轨道递推能力。
3.此外,火星环绕器机构部件指向对完成某些任务尤为重要,当驱动数据的来源于轨道递推结果时,轨道递推精度会直接影响到机构部件指向精度。轨道递推提供地球、太阳矢量序列,为对火、对日定向模式提供基准,为太阳翼提供驱动角,为高增益天线对准地球、中继天线对准巡视器提供指向角。递推模型采用火心模型,从上注的历元轨道递推至下次轨道上注,精度原则是确保太阳翼对日和天线对地指向精度要求在精度要求范围内。
4.本发明通过地面定轨初值进行轨道动力学递推,利用近火段雷达测高数据修正轨道递推结果,提高轨道参数计算精度,从而提高姿态基准和目标指向精度。
5.经查询,cn103017760b《一种大椭圆轨道火星探测器自主对火定向方法》与本发明类似,该专利侧重在地面通信存在延时时,自主导航敏感器又做不到工程应用的情况下,通过轨道递推和定向基准坐标系的建立,可靠的实现火星探测器自主对火定向控制。
6.cn111238536a《一种考虑太阳矢量的火星探测器自主轨道确定方法》与本发明类似,该专利侧重在地火转移段绕日飞行过程中,不依靠地面支持而仅依靠自身所携带的太阳敏感器和火星敏感器完成轨道确定。
7.cn107036603a《基于拉格朗日插值星历的火星探测器器上轨道递推算法》与本发明类似,该专利侧重读取de405星历中行星的位置和速度,利用二次多项式插值算法求取行星的位置和速度,再使用四阶龙格库塔进行轨道递推,满足计算机有限资源约束。
8.专利文献cn104251701a(申请号:cn201310258660.5)公开了一种火星大气制动轨道确定方法,包括如下步骤:采集探测器自身敏感器数据;分析加速度计、星敏、陀螺数据并建立大气密度近似模型;对加速度计和激光雷达高度计建立近似模型;估计探测器的位置和速度。本发明将采用探测器携带的惯性测量单元和激光雷达高度计的测距信息进行信息融合,采用扩展卡尔曼滤波算法对导航系统进行滤波,实现大气制动段的轨道确定。但该发明不是引入雷达测高数据作为观测量,通过数据融合方法,输出得到的轨道递推信息。
技术实现要素:
9.针对现有技术中的缺陷,本发明的目的是提供一种利用雷达测高数据修正环火轨
道递推精度的方法及系统。
10.根据本发明提供的一种利用雷达测高数据修正环火轨道递推精度的方法,包括:
11.步骤s1:建立以火星为中心天体的动力学模型,计算得到预设时刻的轨道计算结果;
12.步骤s2:以雷达测高信息作为探测器测量信息,建立雷达测高的观测模型;
13.步骤s3:对雷达输出的高度数据作为测量信息代入雷达测高的观测模型进行处理,得到导航信息。
14.优选地,在所述步骤s1中:
15.在j2000火星惯性系下,建立以火星为中心天体,包含火星非球形摄动、火卫摄动、气动和太阳引力摄动的动力学模型如下:
[0016][0017][0018]
其中,r表示探测器在火星惯性系中的位置矢量,r=||r||;
[0019]
v表示探测器在火星惯性系中的速度矢量;
[0020]
μm表述火星引力常数;
[0021]
μs表示太阳引力常数;
[0022]rps
表示太阳在火星惯性系中的位置矢量,r
ps
=||r
ps
||;
[0023]rrs
表示太阳相对探测器的位置矢量,r
rs
=r
ps-r,r
rs
=||r
rs
||;
[0024]ans
表示火星非球形引力产生的加速度。
[0025]
优选地,在所述步骤s1中:
[0026]
将火星非球形摄动位函数在火星固联坐标系中展开:
[0027][0028]
其中,u
nsm
为火星非球形摄动力;
[0029]
r为探测器在火星固定坐标系中的距火星中心距离;
[0030]
n为火星引力场模型的阶数;
[0031]
m为火星引力场模型的次数;
[0032]rm
为火星赤道参考半径;
[0033]
μm为火星引力常数;
[0034]
λ为探测器在火星固定坐标系中的火星经度;
[0035]
为探测器在火星固定坐标系中的火星纬度;
[0036]
为归一化的火星引力位函数;
[0037]
为归一化的勒让德多项式;
[0038]
火星非球形摄动加速度为:
[0039]
[0040]
其中,t表示矩阵的转置;
[0041]
r(x',y',z')为火星固联坐标系下的位置;
[0042]
为火星非球形摄动位函数对火星固联坐标系的直角坐标(x',y',z')的梯度;
[0043]
转换到j2000火星惯性系下:
[0044]ans
=m
mansm
[0045]mm
为火心平移固联坐标系到j2000火星惯性坐标系的转换矩阵。
[0046]
优选地,在所述步骤s2中:
[0047]
预设点的大地坐标地理经度为l、地理纬度为b、地理高程为h,地理经度是指该点的大地子午面与起始大地子午面之间的夹角,由起始大地子午面向东为正,向西为负;地理纬度是过预设点的椭球法线与赤道面之间的夹角;地理高程是预设点沿椭球法线到椭球面的距离,从椭球面起算,向外为正,向内为负;
[0048]
地理坐标是以椭球坐标形式表示的,以椭球中心o为坐标系的原点,ze轴与椭球的旋转轴一致并指向北极,xe轴位于起始大地子午面和赤道的交线上,ye轴与xe轴、ze轴构成右手坐标系;
[0049]
s为参考椭球面h高度的一点,由s作椭球面的法线与椭球面交于p,点p的坐标为(x
e1
,z
e1
),点s的坐标为(xe,ze)。
[0050]
根据椭圆方程得:
[0051][0052]
其中,x
e1
为椭球面p点在火固系x轴分量;
[0053]ze1
为椭球面p点在火固系y轴分量;
[0054]
e为火星扁率;
[0055]
a为赤道半径;
[0056]
根据椭圆表面法线的方程得:
[0057][0058]
b为p点的地理纬度,p点的大地子午面与起始大地子午面之间的夹角;
[0059]
由以上两式得:
[0060][0061]
求解得:
[0062][0063]
根据
[0064]
得到:
[0065][0066]
其中,n为p点的卯酉圈曲率半径;
[0067]
点s的坐标(xe,ze)表示为:
[0068]
xe=(n+h)cosb
[0069]
ze=[n(1-e2)+h]sinb
[0070]
其中,xe为探测器位置s点在火固系x轴分量;
[0071]
ze为探测器位置s点在火固系z轴分量;
[0072]
h为点的地理高程;
[0073]
对于三维的情况有:
[0074][0075]
其中,ye为探测器位置s点在火固系y轴分量;
[0076]
l为点的大地坐标用地理经度;
[0077]
当由直角坐标转换为地理经纬度时采用下式:
[0078][0079][0080]
得到雷达高度测量模型:
[0081][0082]
xe、ye、ze的值由惯性坐标系位置到直角坐标系位置转换得到。
[0083]
优选地,在所述步骤s3中:
[0084]
通过地面的导航信息初值,进行轨道积分与信息融合计算,对雷达输出的高度数据h作为测量信息代入雷达高度测量模型进行处理,得到导航信息。
[0085]
根据本发明提供的一种利用雷达测高数据修正环火轨道递推精度的系统,包括:
[0086]
模块m1:建立以火星为中心天体的动力学模型,计算得到预设时刻的轨道计算结果;
[0087]
模块m2:以雷达测高信息作为探测器测量信息,建立雷达测高的观测模型;
[0088]
模块m3:对雷达输出的高度数据作为测量信息代入雷达测高的观测模型进行处理,得到导航信息。
[0089]
优选地,在所述模块m1中:
[0090]
在j2000火星惯性系下,建立以火星为中心天体,包含火星非球形摄动、火卫摄动、
气动和太阳引力摄动的动力学模型如下:
[0091][0092][0093]
其中,r表示探测器在火星惯性系中的位置矢量,r=||r||;
[0094]
v表示探测器在火星惯性系中的速度矢量;
[0095]
μm表述火星引力常数;
[0096]
μs表示太阳引力常数;
[0097]rps
表示太阳在火星惯性系中的位置矢量,r
ps
=||r
ps
||;
[0098]rrs
表示太阳相对探测器的位置矢量,r
rs
=r
ps-r,r
rs
=||r
rs
||;
[0099]ans
表示火星非球形引力产生的加速度。
[0100]
优选地,在所述模块m1中:
[0101]
将火星非球形摄动位函数在火星固联坐标系中展开:
[0102][0103]
其中,u
nsm
为火星非球形摄动力;
[0104]
r为探测器在火星固定坐标系中的距火星中心距离;
[0105]
n为火星引力场模型的阶数;
[0106]
m为火星引力场模型的次数;
[0107]rm
为火星赤道参考半径;
[0108]
μm为火星引力常数;
[0109]
λ为探测器在火星固定坐标系中的火星经度;
[0110]
为探测器在火星固定坐标系中的火星纬度;
[0111]
为归一化的火星引力位函数;
[0112]
为归一化的勒让德多项式;
[0113]
火星非球形摄动加速度为:
[0114][0115]
其中,t表示矩阵的转置;
[0116]
r(x',y',z')为火星固联坐标系下的位置;
[0117]
为火星非球形摄动位函数对火星固联坐标系的直角坐标(x',y',z')的梯度;
[0118]
转换到j2000火星惯性系下:
[0119]ans
=m
mansm
[0120]mm
为火心平移固联坐标系到j2000火星惯性坐标系的转换矩阵。
[0121]
优选地,在所述模块m2中:
[0122]
预设点的大地坐标地理经度为l、地理纬度为b、地理高程为h,地理经度是指该点的大地子午面与起始大地子午面之间的夹角,由起始大地子午面向东为正,向西为负;地理纬度是过预设点的椭球法线与赤道面之间的夹角;地理高程是预设点沿椭球法线到椭球面的距离,从椭球面起算,向外为正,向内为负;
[0123]
地理坐标是以椭球坐标形式表示的,以椭球中心o为坐标系的原点,ze轴与椭球的旋转轴一致并指向北极,xe轴位于起始大地子午面和赤道的交线上,ye轴与xe轴、ze轴构成右手坐标系;
[0124]
s为参考椭球面h高度的一点,由s作椭球面的法线与椭球面交于p,点p的坐标为(x
e1
,z
e1
),点s的坐标为(xe,ze)。
[0125]
根据椭圆方程得:
[0126][0127]
其中,x
e1
为椭球面p点在火固系x轴分量;
[0128]ze1
为椭球面p点在火固系y轴分量;
[0129]
e为火星扁率;
[0130]
a为赤道半径;
[0131]
根据椭圆表面法线的方程得:
[0132][0133]
b为p点的地理纬度,p点的大地子午面与起始大地子午面之间的夹角;
[0134]
由以上两式得:
[0135][0136]
求解得:
[0137][0138]
根据
[0139]
得到:
[0140][0141]
其中,n为p点的卯酉圈曲率半径;
[0142]
点s的坐标(xe,ze)表示为:
[0143]
xe=(n+h)cosb
[0144]
ze=[n(1-e2)+h]sinb
[0145]
其中,xe为探测器位置s点在火固系x轴分量;
[0146]
ze为探测器位置s点在火固系z轴分量;
[0147]
h为点的地理高程;
[0148]
对于三维的情况有:
[0149][0150]
其中,ye为探测器位置s点在火固系y轴分量;
[0151]
l为点的大地坐标用地理经度;
[0152]
当由直角坐标转换为地理经纬度时采用下式:
[0153][0154][0155]
得到雷达高度测量模型:
[0156][0157]
xe、ye、ze的值由惯性坐标系位置到直角坐标系位置转换得到。
[0158]
优选地,在所述模块m3中:
[0159]
通过地面的导航信息初值,进行轨道积分与信息融合计算,对雷达输出的高度数据h作为测量信息代入雷达高度测量模型进行处理,得到导航信息。
[0160]
与现有技术相比,本发明具有如下的有益效果:
[0161]
1、本发明能够通过在轨道动力学模型基础上引入雷达测高数据作为观测量,通过数据融合方法,输出高精度轨道递推信息;
[0162]
2、本发明能实现较长时间器上自主轨道递推功能;
[0163]
3、本发明解决了较长时间无地面定轨数据器上进行轨道递推的难题;
[0164]
4、本发明的应用对于改善器上轨道计算精度有良好效果。
附图说明
[0165]
通过阅读参照以下附图对非限制性实施例所作的详细描述,本发明的其它特征、目的和优点将会变得更明显:
[0166]
图1为雷达测高工作弧段;
[0167]
图2为地理坐标示意图;
[0168]
图3为地理纬度和地心纬度关系;
[0169]
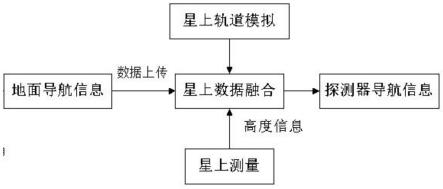
图4为到导航数据融合图。
具体实施方式
[0170]
下面结合具体实施例对本发明进行详细说明。以下实施例将有助于本领域的技术
人员进一步理解本发明,但不以任何形式限制本发明。应当指出的是,对本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变化和改进。这些都属于本发明的保护范围。
[0171]
实施例1:
[0172]
根据本发明提供的一种利用雷达测高数据修正环火轨道递推精度的方法,如图1-图4所示,包括:
[0173]
步骤s1:建立以火星为中心天体的动力学模型,计算得到预设时刻的轨道计算结果;
[0174]
步骤s2:以雷达测高信息作为探测器测量信息,建立雷达测高的观测模型;
[0175]
步骤s3:对雷达输出的高度数据作为测量信息代入雷达测高的观测模型进行处理,得到导航信息。
[0176]
具体地,在所述步骤s1中:
[0177]
在j2000火星惯性系下,建立以火星为中心天体,包含火星非球形摄动、火卫摄动、气动和太阳引力摄动的动力学模型如下:
[0178][0179][0180]
其中,r表示探测器在火星惯性系中的位置矢量,r=||r||;
[0181]
v表示探测器在火星惯性系中的速度矢量;
[0182]
μm表述火星引力常数;
[0183]
μs表示太阳引力常数;
[0184]rps
表示太阳在火星惯性系中的位置矢量,r
ps
=||r
ps
||;
[0185]rrs
表示太阳相对探测器的位置矢量,r
rs
=r
ps-r,r
rs
=||r
rs
||;
[0186]ans
表示火星非球形引力产生的加速度。
[0187]
具体地,在所述步骤s1中:
[0188]
将火星非球形摄动位函数在火星固联坐标系中展开:
[0189][0190]
其中,u
nsm
为火星非球形摄动力;
[0191]
r为探测器在火星固定坐标系中的距火星中心距离;
[0192]
n为火星引力场模型的阶数;
[0193]
m为火星引力场模型的次数;
[0194]rm
为火星赤道参考半径;
[0195]
μm为火星引力常数;
[0196]
λ为探测器在火星固定坐标系中的火星经度;
[0197]
为探测器在火星固定坐标系中的火星纬度;
[0198]
为归一化的火星引力位函数;
[0199]
为归一化的勒让德多项式;
[0200]
火星非球形摄动加速度为:
[0201][0202]
其中,t表示矩阵的转置;
[0203]
r(x',y',z')为火星固联坐标系下的位置;
[0204]
为火星非球形摄动位函数对火星固联坐标系的直角坐标(x',y',z')的梯度;
[0205]
转换到j2000火星惯性系下:
[0206]ans
=m
mansm
[0207]mm
为火心平移固联坐标系到j2000火星惯性坐标系的转换矩阵。
[0208]
具体地,在所述步骤s2中:
[0209]
预设点的大地坐标地理经度为l、地理纬度为b、地理高程为h,地理经度是指该点的大地子午面与起始大地子午面之间的夹角,由起始大地子午面向东为正,向西为负;地理纬度是过预设点的椭球法线与赤道面之间的夹角;地理高程是预设点沿椭球法线到椭球面的距离,从椭球面起算,向外为正,向内为负;
[0210]
地理坐标是以椭球坐标形式表示的,以椭球中心o为坐标系的原点,ze轴与椭球的旋转轴一致并指向北极,xe轴位于起始大地子午面和赤道的交线上,ye轴与xe轴、ze轴构成右手坐标系;
[0211]
s为参考椭球面h高度的一点,由s作椭球面的法线与椭球面交于p,点p的坐标为(x
e1
,z
e1
),点s的坐标为(xe,ze)。
[0212]
根据椭圆方程得:
[0213][0214]
其中,x
e1
为椭球面p点在火固系x轴分量;
[0215]ze1
为椭球面p点在火固系y轴分量;
[0216]
e为火星扁率;
[0217]
a为赤道半径;
[0218]
根据椭圆表面法线的方程得:
[0219][0220]
b为p点的地理纬度,p点的大地子午面与起始大地子午面之间的夹角;
[0221]
由以上两式得:
[0222][0223]
求解得:
[0224][0225]
根据
[0226]
得到:
[0227][0228]
其中,n为p点的卯酉圈曲率半径;
[0229]
点s的坐标(xe,ze)表示为:
[0230]
xe=(n+h)cosb
[0231]
ze=[n(1-e2)+h]sinb
[0232]
其中,xe为探测器位置s点在火固系x轴分量;
[0233]
ze为探测器位置s点在火固系z轴分量;
[0234]
h为点的地理高程;
[0235]
对于三维的情况有:
[0236][0237]
其中,ye为探测器位置s点在火固系y轴分量;
[0238]
l为点的大地坐标用地理经度;
[0239]
当由直角坐标转换为地理经纬度时采用下式:
[0240][0241][0242]
得到雷达高度测量模型:
[0243][0244]
xe、ye、ze的值由惯性坐标系位置到直角坐标系位置转换得到。
[0245]
具体地,在所述步骤s3中:
[0246]
通过地面的导航信息初值,进行轨道积分与信息融合计算,对雷达输出的高度数据h作为测量信息代入雷达高度测量模型进行处理,得到导航信息。
[0247]
实施例2:
[0248]
实施例2为实施例1的优选例,以更为具体地对本发明进行说明。
[0249]
本领域技术人员可以将本发明提供的一种利用雷达测高数据修正环火轨道递推精度的方法,理解为利用雷达测高数据修正环火轨道递推精度的系统的具体实施方式,即
所述利用雷达测高数据修正环火轨道递推精度的系统可以通过执行所述利用雷达测高数据修正环火轨道递推精度的方法的步骤流程予以实现。
[0250]
根据本发明提供的一种利用雷达测高数据修正环火轨道递推精度的系统,包括:
[0251]
模块m1:建立以火星为中心天体的动力学模型,计算得到预设时刻的轨道计算结果;
[0252]
模块m2:以雷达测高信息作为探测器测量信息,建立雷达测高的观测模型;
[0253]
模块m3:对雷达输出的高度数据作为测量信息代入雷达测高的观测模型进行处理,得到导航信息。
[0254]
具体地,在所述模块m1中:
[0255]
在j2000火星惯性系下,建立以火星为中心天体,包含火星非球形摄动、火卫摄动、气动和太阳引力摄动的动力学模型如下:
[0256][0257][0258]
其中,r表示探测器在火星惯性系中的位置矢量,r=||r||;
[0259]
v表示探测器在火星惯性系中的速度矢量;
[0260]
μm表述火星引力常数;
[0261]
μs表示太阳引力常数;
[0262]rps
表示太阳在火星惯性系中的位置矢量,r
ps
=||r
ps
||;
[0263]rrs
表示太阳相对探测器的位置矢量,r
rs
=r
ps-r,r
rs
=||r
rs
||;
[0264]ans
表示火星非球形引力产生的加速度。
[0265]
具体地,在所述模块m1中:
[0266]
将火星非球形摄动位函数在火星固联坐标系中展开:
[0267][0268]
其中,u
nsm
为火星非球形摄动力;
[0269]
r为探测器在火星固定坐标系中的距火星中心距离;
[0270]
n为火星引力场模型的阶数;
[0271]
m为火星引力场模型的次数;
[0272]rm
为火星赤道参考半径;
[0273]
μm为火星引力常数;
[0274]
λ为探测器在火星固定坐标系中的火星经度;
[0275]
为探测器在火星固定坐标系中的火星纬度;
[0276]
为归一化的火星引力位函数;
[0277]
为归一化的勒让德多项式;
[0278]
火星非球形摄动加速度为:
[0279][0280]
其中,t表示矩阵的转置;
[0281]
r(x',y',z')为火星固联坐标系下的位置;
[0282]
为火星非球形摄动位函数对火星固联坐标系的直角坐标(x',y',z')的梯度;
[0283]
转换到j2000火星惯性系下:
[0284]ans
=m
mansm
[0285]mm
为火心平移固联坐标系到j2000火星惯性坐标系的转换矩阵。
[0286]
具体地,在所述模块m2中:
[0287]
预设点的大地坐标地理经度为l、地理纬度为b、地理高程为h,地理经度是指该点的大地子午面与起始大地子午面之间的夹角,由起始大地子午面向东为正,向西为负;地理纬度是过预设点的椭球法线与赤道面之间的夹角;地理高程是预设点沿椭球法线到椭球面的距离,从椭球面起算,向外为正,向内为负;
[0288]
地理坐标是以椭球坐标形式表示的,以椭球中心o为坐标系的原点,ze轴与椭球的旋转轴一致并指向北极,xe轴位于起始大地子午面和赤道的交线上,ye轴与xe轴、ze轴构成右手坐标系;
[0289]
s为参考椭球面h高度的一点,由s作椭球面的法线与椭球面交于p,点p的坐标为(x
e1
,z
e1
),点s的坐标为(xe,ze)。
[0290]
根据椭圆方程得:
[0291][0292]
其中,x
e1
为椭球面p点在火固系x轴分量;
[0293]ze1
为椭球面p点在火固系y轴分量;
[0294]
e为火星扁率;
[0295]
a为赤道半径;
[0296]
根据椭圆表面法线的方程得:
[0297][0298]
b为p点的地理纬度,p点的大地子午面与起始大地子午面之间的夹角;
[0299]
由以上两式得:
[0300][0301]
求解得:
[0302]
[0303]
根据得到:
[0304][0305]
其中,n为p点的卯酉圈曲率半径;
[0306]
点s的坐标(xe,ze)表示为:
[0307]
xe=(n+h)cosb
[0308]
ze=[n(1-e2)+h]sinb
[0309]
其中,xe为探测器位置s点在火固系x轴分量;
[0310]
ze为探测器位置s点在火固系z轴分量;
[0311]
h为点的地理高程;
[0312]
对于三维的情况有:
[0313][0314]
其中,ye为探测器位置s点在火固系y轴分量;
[0315]
l为点的大地坐标用地理经度;
[0316]
当由直角坐标转换为地理经纬度时采用下式:
[0317][0318][0319]
得到雷达高度测量模型:
[0320][0321]
xe、ye、ze的值由惯性坐标系位置到直角坐标系位置转换得到。
[0322]
具体地,在所述模块m3中:
[0323]
通过地面的导航信息初值,进行轨道积分与信息融合计算,对雷达输出的高度数据h作为测量信息代入雷达高度测量模型进行处理,得到导航信息。
[0324]
实施例3:
[0325]
实施例3为实施例1的优选例,以更为具体地对本发明进行说明。
[0326]
本发明给出了利用雷达测高数据修正环火轨道递推精度的方法,在高精度轨道动力学模型基础上,引入雷达测高数据作为观测量,建立状态方程和观测方程,通过导航滤波算法,输出高精度轨道递推信息。
[0327]
1)在j2000火星惯性系下,建立以火星为中心天体,包含火星高阶非球形摄动和太阳引力摄动的动力学模型。根据星上计算机的计算能力,以及预先给定的轨道计算精度,对
调用时给定轨道初值进行积分,得到需要时刻的轨道计算结果。
[0328]
2)雷达测高信息能够作为探测器测量信息,建立雷达测高的观测模型,在应用过程中,需要考虑测量的可见性条件、误差信息等进行数据融合。
[0329]
3)导航滤波算法模块利用前面得到的观测信息进行导航解算,获得探测器的位置、速度等信息。通过地面的导航信息,调用轨道积分模块与信息融合算法模块,对雷达输出的高度数据进行处理,得到更高精度的导航信息;
[0330]
下面结合附图说明本发明的优选实施例。
[0331]
1)在j2000火星惯性系下,建立以火星为中心天体,包含火星高阶非球形摄动、火卫摄动、气动和太阳引力摄动的动力学模型如下:
[0332][0333][0334]
上式中:
[0335]
r表示探测器在火星惯性系中的位置矢量,r=||r||;
[0336]
v表示探测器在火星惯性系中的速度矢量;
[0337]
μm和μs分别表示火星引力常数和太阳引力常数;
[0338]rps
表示太阳在火星惯性系中的位置矢量,r
ps
=||r
ps
||;
[0339]rrs
表示太阳相对探测器的位置矢量,即r
rs
=r
ps-r,r
rs
=||r
rs
||;
[0340]ans
表示火星非球形引力产生的加速度;
[0341]
火星非球形摄动位函数在火星固联坐标系中可展开以下球谐函数的形式:
[0342][0343]
式中:
[0344]unsm
为火星非球形摄动力;
[0345]
r为探测器在火星固定坐标系中的距火星中心距离;
[0346]
n,m分别为火星引力场模型的阶数、次数
[0347]rm
—火星赤道参考半径;
[0348]
μm—火星引力常数;
[0349]
λ,—探测器在火星固定坐标系中的火星经度和纬度;
[0350]
—归一化的火星引力位函数;
[0351]
—归一化的勒让德多项式;
[0352]
则火星非球形摄动加速度可表示为:
[0353][0354]
式中,t—表示矩阵的转置
[0355]
r(x',y',z')为火星固联坐标系下的位置;
[0356]
—火星非球形摄动位函数对火星固联坐标系的直角坐标(x',y',z')的梯度。
[0357]
转换到j2000火星惯性系下:
[0358]ans
=m
mansm
[0359]mm
—火心平移固联坐标系到j2000火星惯性坐标系的转换矩阵。
[0360]
2)探测器上雷达测高信息能够作为探测器测量信息,建立雷达测高的观测模型。
[0361]
某点的大地坐标用地理经度l、地理纬度b和地理高程h表示,如图2所示。地理经度是指该点的大地子午面与起始大地子午面之间的夹角,由起始大地子午面,向东为正,向西为负;地理纬度是过该点的椭球法线与赤道面之间的夹角;地理高程是该点沿椭球法线到椭球面的距离,从椭球面起算,向外为正,向内为负。
[0362]
地理坐标是以椭球坐标形式表示的,相应地还有以直角坐标形式表示的,即为火固系o-xeyeze,如图2所示。以椭球中心o为坐标系的原点ze轴与椭球的旋转轴一致并指向北极,xe轴位于起始大地子午面和赤道的交线上,ye轴与xe轴、ze轴构成右手坐标系。
[0363]
设s为参考椭球面h高度的一点,由s作椭球面的法线与椭球面交于p。因为火星看作旋转椭球,所以只需在xeoze平面内简化为二维椭圆问题。图3给出了xeoze平面的几何关系,记点p的坐标为(x
e1
,z
e1
),点s的坐标为(xe,ze)。
[0364]
由椭圆方程可得
[0365]
x
e1
为椭球面p点在火固系x轴分量,z
e1
为椭球面p点在火固系y轴分量,e为火星扁率,a为赤道半径,
[0366]
由椭圆表面法线的方程可得
[0367]
b为p点的地理纬度,指该点的大地子午面与起始大地子午面之间的夹角
[0368]
对以上两式可得求解得
[0369]
由图3可得从而可得
[0370]
式中,n为p点的卯酉圈曲率半径
[0371]
则点s的坐标(xe,ze)可表示为xe=(n+h)cosb,ze=[n(1-e2)+h]sinb
[0372]
xe为探测器位置s点在火固系x轴分量,ze为探测器位置s点在火固系z轴分量,h为点的地理高程
[0373]
从而,对于三维的情况有
[0374]
[0375]
ye为探测器位置s点在火固系y轴分量;
[0376]
l为点的大地坐标用地理经度;
[0377]
当由直角坐标转换为地理经纬度时,通常采用下式,即
[0378][0379][0380]
可得到雷达高度测量模型为
[0381][0382]
xe、ye、ze的值可由惯性坐标系位置到直角坐标系位置转换得到。
[0383]
3)采用扩展卡尔曼滤波算法,通过地面的导航信息初值,调用轨道积分模块与信息融合算法模块,对雷达输出的高度数据h作为测量信息代入雷达高度测量模型进行处理,得到更高精度的导航信息,见图4;
[0384]
本领域技术人员知道,除了以纯计算机可读程序代码方式实现本发明提供的系统、装置及其各个模块以外,完全可以通过将方法步骤进行逻辑编程来使得本发明提供的系统、装置及其各个模块以逻辑门、开关、专用集成电路、可编程逻辑控制器以及嵌入式微控制器等的形式来实现相同程序。所以,本发明提供的系统、装置及其各个模块可以被认为是一种硬件部件,而对其内包括的用于实现各种程序的模块也可以视为硬件部件内的结构;也可以将用于实现各种功能的模块视为既可以是实现方法的软件程序又可以是硬件部件内的结构。
[0385]
以上对本发明的具体实施例进行了描述。需要理解的是,本发明并不局限于上述特定实施方式,本领域技术人员可以在权利要求的范围内做出各种变化或修改,这并不影响本发明的实质内容。在不冲突的情况下,本技术的实施例和实施例中的特征可以任意相互组合。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1