一种高精度直线位移传感器自动标定装置及方法与流程
本发明涉及一种高精度直线位移传感器标定装置,用于直线位移传感器的批量校准,具有高效率、高精度的特点,在固体火箭发动机地面点火试验、固体火箭发动机结构强度试验领域可广泛应用。
背景技术:
1、在固体火箭发动机研试过程中,需要进行一系列的试验以验证发动机的结构、评价发动机的性能。位移测量是固体火箭发动机试验过程中的基础测试项目,对评价发动机在试验过程中的宏观变形和评价发动机刚度、强度有重要意义。由于固体火箭发动机位移测量的特殊性,其较一般工程测试具有位移测点布置多,试验数据质量要求高的特点。应用于固体火箭发动机试验的位移传感器种类丰富,其中,拉杆式直线位移传感器是发动机试验应用中最主要的位移传感器类型。
2、位移传感器标定是位移传感器高质量应用的重要环节,也是提高位移试验数据质量的必要手段,当前固体发动机试验所用的拉杆式直线位移传感器标定多采用的高精度游标卡尺或深度尺进行人工手动标定,在实际标定过程中存在正反行程循环标定操作困难的问题,整个标定过程耗时费力,标定效率较低、标定质量较差,严重消耗了较多的试验时间和资源。
3、发明目的
4、为了解决传统通过高精度游标卡尺或深度尺进行人工手动标定方式对拉杆式直线位移传感器进行标定所存在的耗时耗力的技术问题,本发明提供了一种高精度直线位移传感器自动标定装置及方法,能够提高位移传感器的标定效率和标定质量,节约试验资源,以满足试验发展需要。
5、本发明的技术方案是:
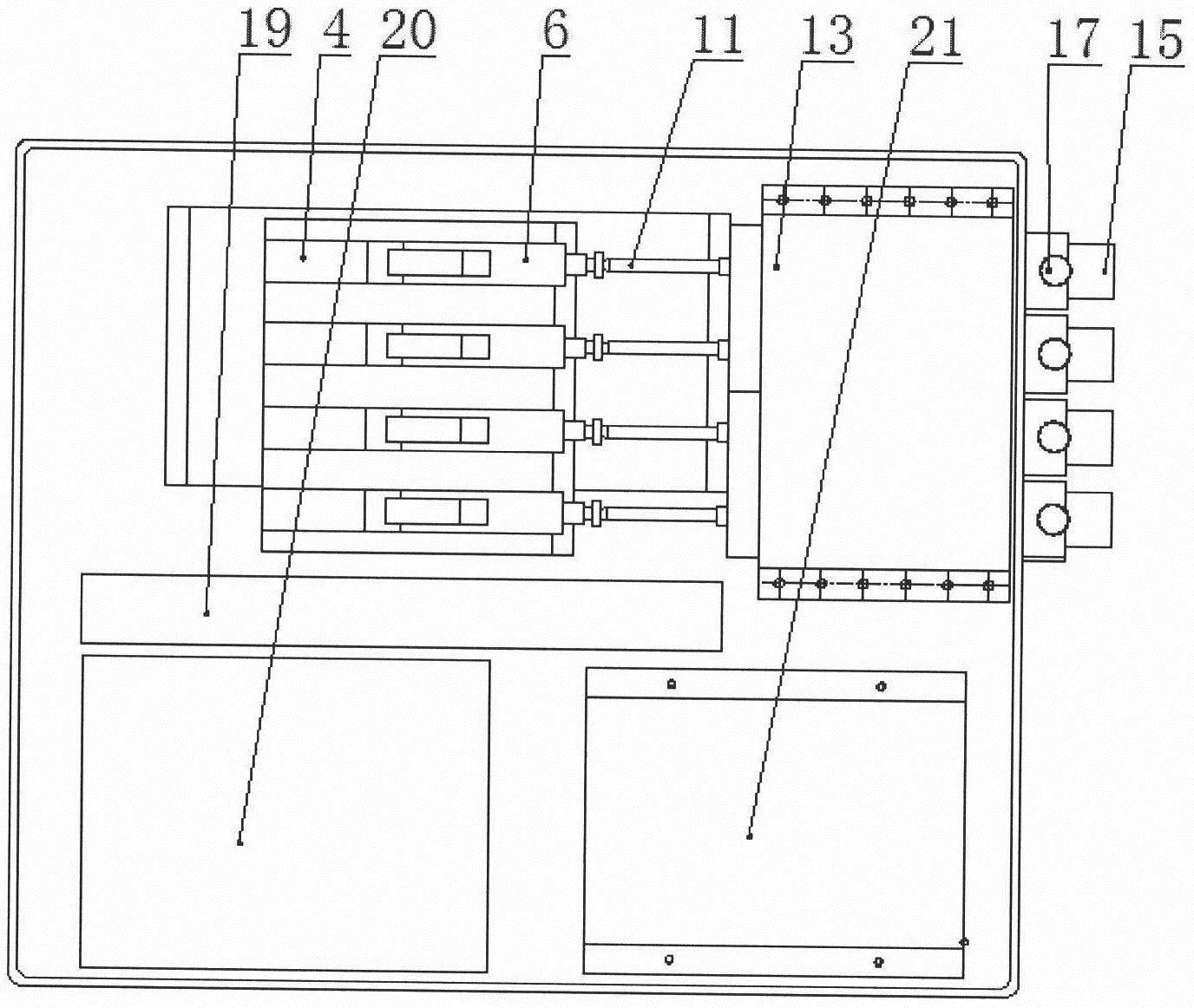
6、一种高精度直线位移传感器自动标定装置,其特殊之处在于:包括机箱、设置在机箱内的直线运动机构、零位调整机构、标定目标固定机构、驱动单元、控制单元和人机交互单元;
7、零位调整机构设置在所述直线运动机构上,通过直线运动机构带动其进行直线运动,实现待标定直线位移传感器的批量粗调零和标定;
8、零位调整机构用于实现待标定直线位移传感器的单独微调零;
9、标定目标固定机构用于将待标定直线位移传感器固定在所述机箱上;
10、控制单元用于接收所述人机交互单元的数据,并向所述驱动单元发出用于控制所述直线运动机构和零位调整机构的脉冲指令和方向指令;
11、人机交互单元用于实现参数的输入和显示。
12、进一步地,所述直线运动机构包括高精度电机、直线滑轨平台、直线滑轨和光栅尺;直线滑轨平台设置在所述直线滑轨上,由高精度电机驱动沿着直线滑轨运动;光栅尺设置在所述直线滑轨的安装基础上。
13、进一步地,零位调整机构包括调零按钮、若干驱动电路和若干电动推杆,电动推杆设置在所述直线滑轨平台上,且分别与待标定的各直线位移传感器一一对应同轴布置。
14、进一步地,所述电动推杆的推杆端部设置有电动推杆顶盘。
15、进一步地,所述标定目标固定机构包括用于容纳待标定直线位移传感器的安装通道、设置在安装通道前端的位移前限位、设置在位移通道后端的通道后限位和顶丝;安装通道、位移前限位和通道后限位整体夹持在位移固定架上,通过位移固定架安装在箱体上。
16、进一步地,所述机箱上设有观察窗。
17、利用权利要求上述的高精度直线位移传感器自动标定装置对直线位移传感器进行标定的方法,其特殊之处在于,包括以下步骤:
18、步骤一:上电开机,将待标定的位移传感器经位移通道穿入,其位移传感器顶杆通过位移前限位的中央孔进入箱体;
19、步骤二:将位移传感器推至位移通道底部,在通道后限位上对称锁紧将其固定,然后将位移传感器接入数据采集系统;
20、步骤三:观察位移传感器顶杆的零位状态,操作人机交互单元控制直线运动机构粗调零位;
21、步骤四:观察位移传感器顶杆的零位状态,操作零位调整机构控制高精度电动推杆微调零位;
22、步骤五:标定:
23、操作人机交互单元,选择标定通道和传感器参数,直线运动机构运动完成批量标定;所述传感器参数包括台阶数,最大位移量,通道号,每个台阶的步长;
24、步骤六:保存或导出标定数据。
25、进一步地,步骤五中:当各待标定位移传感器的量程不同时,优先选择最大量程的位移传感器先标定,然后选择量程次之的位移传感器进行标定,依次类推。
26、进一步地,步骤五中:选择传感器参数后,控制器会自动计算步长和台阶数,确认被标定传感器输入参数的可执行性,多个传感器参数矛盾会自动发出提示。
27、进一步地,步骤五在标定过程中,控制器会根据采集系统的数据,实时判断标定线性度、重复性位移量偏差是否满足标定要求,当不满足时会在触控平板电脑上返回相应的提示。
28、本发明的有益效果:
29、1、本发明采用高精度电机作为动力,设计了特殊的标定平台,设计了特殊的标定平台,通过直线运动机构和零位调整机构协同配合,实现了位移标定时粗调零的批量化和标定的自动化和批量化,消除了正反行程循环标定产生的误差和人为标定操作中的不可靠因素,大幅度提升了标定质量和标定效率。
30、2、本发明特殊设计了位移传感器的固定机构,拆装方便,在对其进行标定前,只需要将其插入即可,标定完成后拔出即可,并且在标定装置整体封装后,仅位移顶杆进入箱体内部,减少了外源污染和干扰。
31、3、传统的标定过程一般采用引伸仪、高精度游标卡尺、量块等进行位移传感器标定,精度低;而本发明采用以光栅尺为标尺的高精度直线滑台,其直线位置精度很高,优于常规标准量器。
32、3、本发明利用以高精度电动推杆为核心的零位调整机构对位移传感器进行微调零,可以消除位移传感器批量标定中存在的初始零位差异,使批量标定所有传感器的标定过程具有高度的一致性。
33、4、本发明设计了更为科学的人机交互模式,输入、观察、判断、调整,自动化与自主性得到平衡。
34、5、本发明标定效率高,人力成本低,便于操作,兼容性强,易于推广。
技术实现思路
技术特征:
1.一种高精度直线位移传感器自动标定装置,其特征在于:包括机箱、设置在机箱内的直线运动机构、零位调整机构、标定目标固定机构、驱动单元、控制单元和人机交互单元;
2.根据权利要求1所述的高精度直线位移传感器自动标定装置,其特征在于:所述直线运动机构包括高精度电机、直线滑轨平台、直线滑轨和光栅尺;直线滑轨平台设置在所述直线滑轨上,由高精度电机驱动沿着直线滑轨运动;光栅尺设置在所述直线滑轨的安装基础上。
3.根据权利要求2所述的高精度直线位移传感器自动标定装置,其特征在于:零位调整机构包括调零按钮、若干驱动电路和若干电动推杆,电动推杆设置在所述直线滑轨平台上,且分别与待标定的各直线位移传感器一一对应同轴布置。
4.根据权利要求3所述的高精度直线位移传感器自动标定装置,其特征在于:所述电动推杆的推杆端部设置有电动推杆顶盘。
5.根据权利要求1-4任一所述的高精度直线位移传感器自动标定装置,其特征在于:所述标定目标固定机构包括用于容纳待标定直线位移传感器的安装通道、设置在安装通道前端的位移前限位、设置在位移通道后端的通道后限位和顶丝;安装通道、位移前限位和通道后限位整体夹持在位移固定架上,通过位移固定架安装在箱体上。
6.根据权利要求5所述的高精度直线位移传感器自动标定装置,其特征在于:所述机箱上设有观察窗。
7.利用权利要求1-6任一所述的高精度直线位移传感器自动标定装置对直线位移传感器进行标定的方法,其特征在于,包括以下步骤:
8.根据权利要求7所述的利用高精度直线位移传感器自动标定装置对直线位移传感器进行标定的方法,其特征在于:
9.根据权利要求8所述的利用高精度直线位移传感器自动标定装置对直线位移传感器进行标定的方法,其特征在于:
10.根据权利要求9所述的利用高精度直线位移传感器自动标定装置对直线位移传感器进行标定的方法,其特征在于:
技术总结
为了解决传统通过高精度游标卡尺或深度尺进行人工手动标定方式对拉杆式直线位移传感器进行标定所存在的耗时耗力的技术问题,本发明提供了一种高精度直线位移传感器自动标定装置及方法,本发明采用高精度电机作为动力,设计了特殊的标定平台,设计了特殊的标定平台,通过直线运动机构和零位调整机构协同配合,实现了位移标定时粗调零的批量化和标定的自动化和批量化,消除了正反行程循环标定产生的误差和人为标定操作中的不可靠因素,大幅度提升了标定质量和标定效率。
技术研发人员:王智勇,高永刚,沈飞,张秀玲,姜文英,王征,郭李艳
受保护的技术使用者:西安航天动力测控技术研究所
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!