机器人定位方法、装置、电子设备及存储介质与流程
本发明涉及机器人,尤其涉及一种机器人定位方法、装置、电子设备及存储介质。
背景技术:
1、随着科技的发展,越来越多的机器人进入到日常工作生活中,例如,在一些医院中有医院机器人,在餐饮店中有送餐的机器人,在物流行业,有物流机器人。
2、机器人在工作过程中需要随时进行定位,由于机器人的使用场景大多是在室内,室内环境较为复杂、房间较多、人员密集,因此,对机器人的定位精度要求高。
3、目前,一般在室内增设多个网络设备标识,协助机器人定位,该种方式需要部署大量网络设备标识,成本较高,而且该种方式没有对采集的网络信号做区分,存在较大的定位误差。
4、因此,需要提供一种机器人定位方法,提高机器人的定位精度,降低运营成本。
技术实现思路
1、本发明提供一种机器人定位方法、装置、电子设备及存储介质,用以提高机器人的定位精度,降低运营成本。
2、本发明提供一种机器人定位方法,包括:
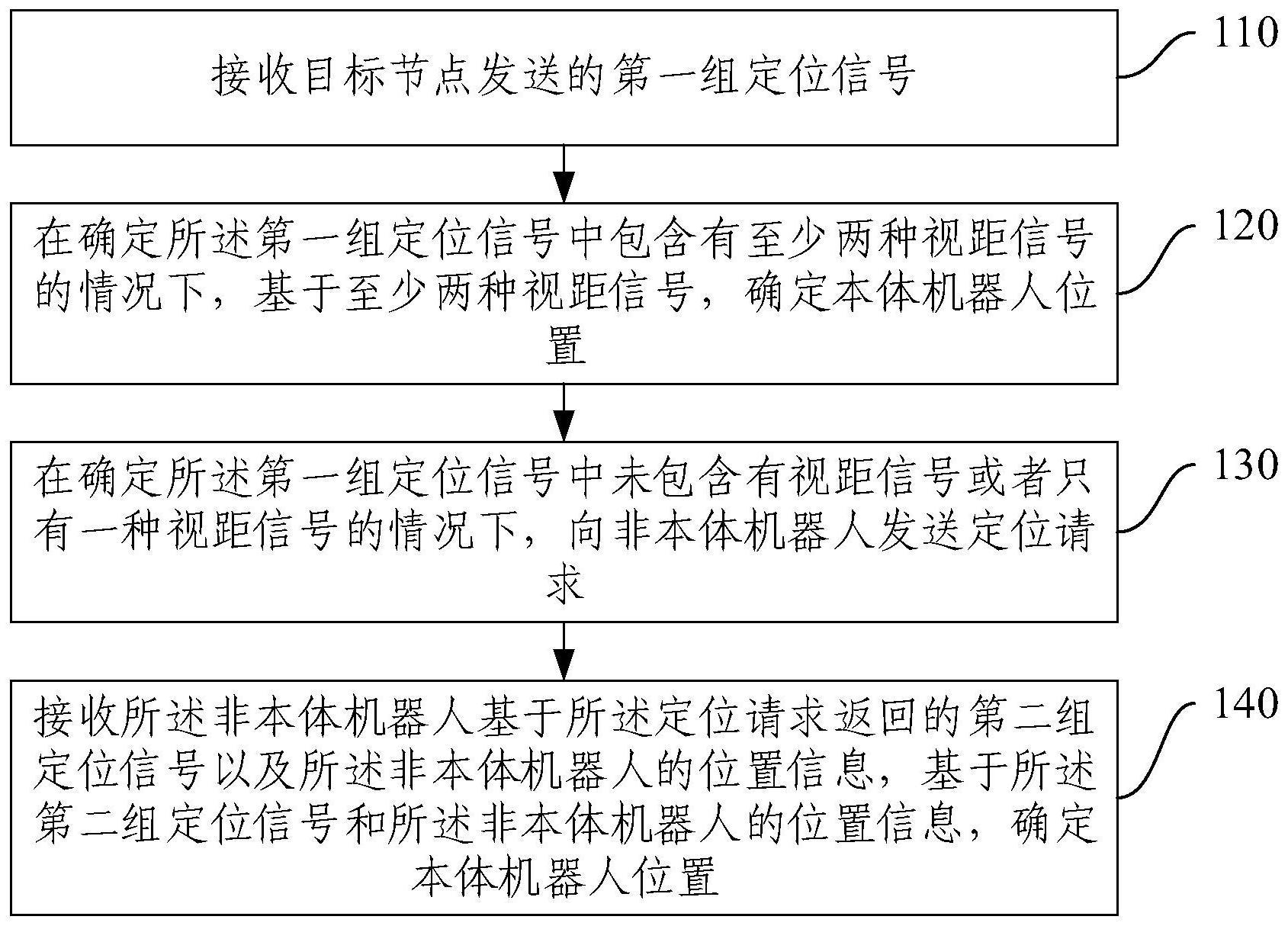
3、接收目标节点发送的第一组定位信号,所述目标节点包括微基站和锚节点;
4、在确定所述第一组定位信号中包含有至少两种视距信号的情况下,基于至少两种视距信号,确定本体机器人位置;
5、在确定所述第一组定位信号中未包含有视距信号或者只有一种视距信号的情况下,向非本体机器人发送定位请求;
6、接收所述非本体机器人基于所述定位请求返回的第二组定位信号以及所述非本体机器人的位置信息,基于所述第二组定位信号和所述非本体机器人的位置信息,确定本体机器人位置。
7、根据本发明提供的机器人定位方法,还包括:
8、将所述第一组定位信号输入至预设的信号分类模型,得到所述第一组定位信号中各信号对应的信号分类结果;
9、确定所述信号分类结果对应的分类置信度,将分类置信度大于预设置信度阈值的信号,确定为视距信号;
10、其中,所述信号分类模型,为将原始信号样本集输入至xgboost算法模型进行训练得到。
11、根据本发明提供的机器人定位方法,还包括:
12、将所述第一组定位信号中,分类置信度不满足预设的置信度阈值范围的信号,与所述原始信号样本集,组成临时样本集;
13、将所述临时样本集输入至所述xgboost算法模型进行训练,得到信号新分类结果,以及所述信号新分类结果对应的分类器;
14、在所述信号新分类结果满足预设分类要求的情况下,基于所述信号新分类结果对应的分类器,得到信号分类模型。
15、根据本发明提供的机器人定位方法,还包括:
16、在所述信号新分类结果不满足预设要求的情况下,更新所述置信度阈值。
17、根据本发明提供的机器人定位方法,所述基于所述第二组定位信号和所述非本体机器人的位置信息,确定本体机器人位置,包括:
18、基于所述第二组定位信号,确定所述第二组定位信号至所述本体机器人的到达角;
19、基于所述到达角和所述非本体机器人的位置信息,得到所述本体机器人位置。
20、根据本发明提供的机器人定位方法,所述向非本体机器人发送定位请求,包括:
21、基于超宽带协议向所述非本体机器人发送定位请求;
22、所述接收所述非本体机器人基于所述定位请求返回的第二组定位信号以及所述非本体机器人的位置信息,包括:
23、接收所述非本体机器人基于所述定位请求,并通过超宽带协议返回的所述第二组定位信号以及所述非本体机器人的位置信息。
24、本发明还提供一种机器人定位装置,包括:
25、接收模块,用于接收目标节点发送的第一组定位信号,所述目标节点包括微基站和锚节点;
26、第一定位模块,用于在确定所述第一组定位信号中包含有至少两种视距信号的情况下,基于至少两种视距信号,确定本体机器人位置;
27、请求模块,用于在确定所述第一组定位信号中未包含有视距信号或者只有一种视距信号的情况下,向非本体机器人发送定位请求;
28、第二定位模块,用于接收所述非本体机器人基于所述定位请求返回的第二组定位信号以及所述非本体机器人的位置信息,基于所述第二组定位信号和所述非本体机器人的位置信息,确定本体机器人位置。
29、本发明还提供一种电子设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时实现如上述任一种所述机器人定位方法。
30、本发明还提供一种非暂态计算机可读存储介质,其上存储有计算机程序,该计算机程序被处理器执行时实现如上述任一种所述机器人定位方法。
31、本发明还提供一种计算机程序产品,包括计算机程序,所述计算机程序被处理器执行时实现如上述任一种所述机器人定位方法。
32、本发明提供的机器人定位方法、装置、电子设备及存储介质,通过将所接收到的第一组定位信号中是否包含有视距信号以及所包含的视距信号的种类,进行区分;若第一组定位信号中包含有两种以上的视距信号,则可以直接其中的视距信号确定本体机器人的位置;若第一组定位信号中不存在视距信号或者只有一种视距信号,那么就可以通过与非本体机器人进行协助,通过非本体机器人发送的第二组定位信号,确定本体机器人的位置。
33、本发明提供的机器人定位方法,可以充分利用已部署的微基站,再适量布置锚节点,并结合其他机器人共同完成定位即可,不需要再单独布置大量的定位节点,对机器人进行定位,有效减少了定位节点的部署,降低了运营成本。
34、此外,本发明将定位信号区分为视距信号和非视距信号,采用不同的定位方式,有效减少多径小于的影响,提高机器人的定位精度。
技术特征:
1.一种机器人定位方法,其特征在于,包括:
2.根据权利要求1所述的机器人定位方法,其特征在于,还包括:
3.根据权利要求2所述的机器人定位方法,其特征在于,还包括:
4.根据权利要求3所述的机器人定位方法,其特征在于,还包括:
5.根据权利要求1所述的机器人定位方法,其特征在于,所述基于所述第二组定位信号和所述非本体机器人的位置信息,确定本体机器人位置,包括:
6.根据权利要求1-5任一项所述的机器人定位方法,其特征在于,所述向非本体机器人发送定位请求,包括:
7.一种机器人定位装置,其特征在于,包括:
8.一种电子设备,包括存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,其特征在于,所述处理器执行所述程序时实现如权利要求1至6任一项所述机器人定位方法。
9.一种非暂态计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现如权利要求1至6任一项所述机器人定位方法。
10.一种计算机程序产品,包括计算机程序,其特征在于,所述计算机程序被处理器执行时实现如权利要求1至6任一项所述机器人定位方法。
技术总结
本发明提供一种机器人定位方法、装置、电子设备及存储介质,该方法,包括:接收目标节点发送的第一组定位信号,所述目标节点包括微基站和锚节点;在确定所述第一组定位信号中包含有至少两种视距信号的情况下,基于至少两种视距信号,确定本体机器人位置;在确定所述第一组定位信号中未包含有视距信号或者只有一种视距信号的情况下,向非本体机器人发送定位请求;接收所述非本体机器人基于所述定位请求返回的第二组定位信号以及所述非本体机器人的位置信息,基于所述第二组定位信号和所述非本体机器人的位置信息,确定本体机器人位置。本发明提供的机器人定位方法、装置、电子设备及存储介质,可以提高机器人的定位精度,降低运营成本。
技术研发人员:朱智愚,邢家齐
受保护的技术使用者:中移系统集成有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!