在激光雷达中使用的测距方法与流程
本公开涉及激光雷达,更具体而言涉及在激光雷达中使用的测距方法、执行该方法的激光雷达、车辆、电子设备、介质以及程序产品。
背景技术:
1、激光雷达,又称为激光探测和测距系统(lidar或ladar),其通过向目标对象发射激光光束并接收从目标对象反射的光束来测量目标对象的位置、速度等信息。
2、激光雷达有着广泛的应用领域。例如,激光雷达被预期用于自主或半自主车辆中。又例如,激光雷达还被预期用于机器人设备中。
技术实现思路
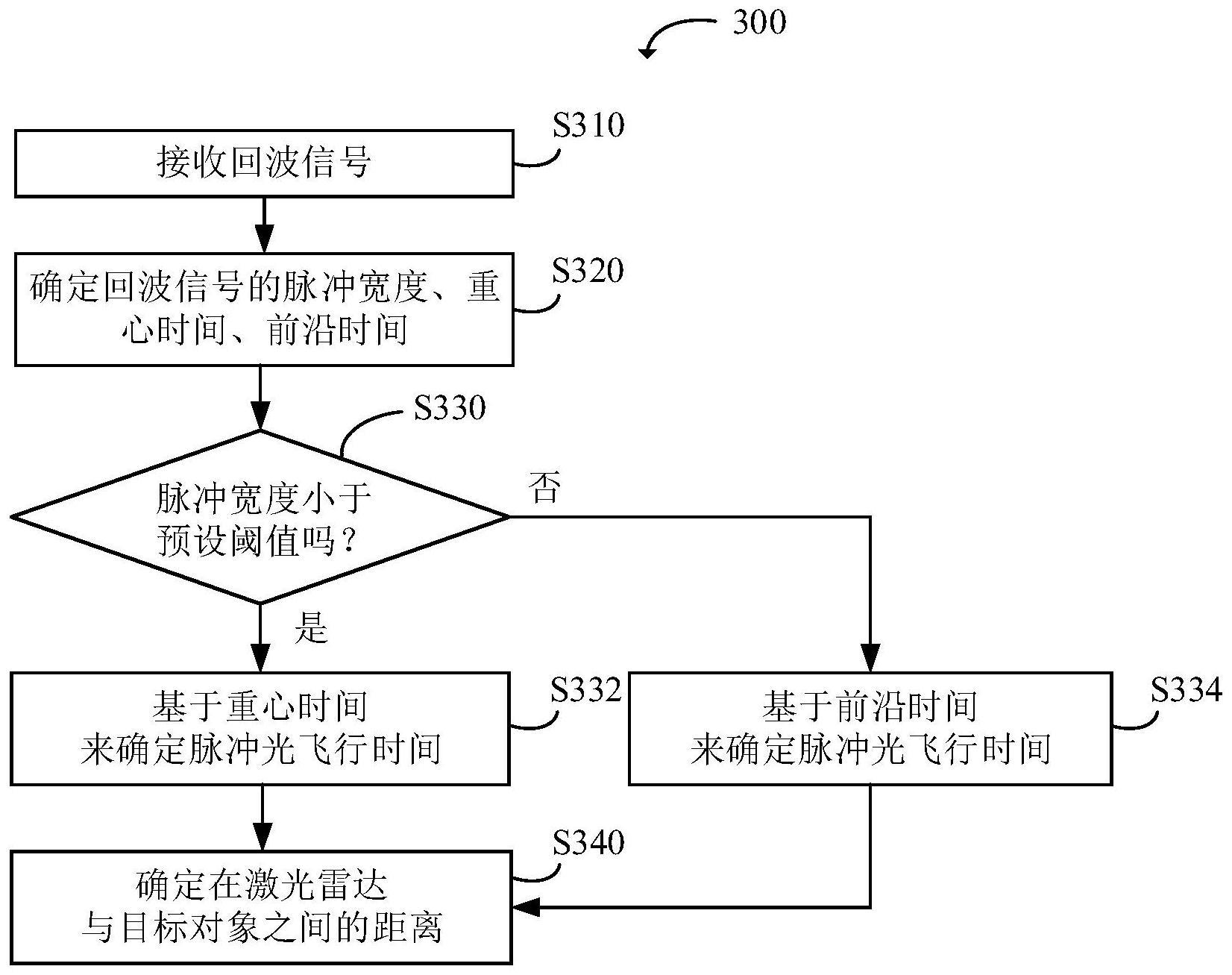
1、根据本公开的第一方面,提出了一种在激光雷达中使用的测距方法,该方法包括:接收回波信号,该回波信号与响应于从激光雷达向目标对象发射第一脉冲光而从目标对象反射的第二脉冲光对应;确定回波信号的脉冲宽度;将所确定的脉冲宽度与预设阈值进行比较,在所确定的脉冲宽度小于预设阈值的情况下,基于与回波信号的波形的重心位置对应的第一时间来确定脉冲光飞行时间,并且,在所确定的脉冲宽度大于预设阈值的情况下,基于与回波信号的预定前沿位置对应的第二时间来确定脉冲光飞行时间,并且,在所确定的脉冲宽度等于预设阈值的情况下,基于第一时间或者第二时间来确定脉冲光飞行时间;以及基于所确定的脉冲光飞行时间,确定在激光雷达与目标对象之间的距离。
2、根据本公开的第二方面,提出了一种激光雷达,包括:光源,被配置为发射第一脉冲光;扫描器,被配置为引导第一脉冲光以扫描目标对象;光接收器,被配置为检测由目标对象反射的第二脉冲光;以及控制器,控制器与光源、扫描器和光接收器通信地耦接,控制器被配置为执行以下操作:接收回波信号,该回波信号与第二脉冲光对应;确定回波信号的脉冲宽度;将所确定的脉冲宽度与预设阈值进行比较,在所确定的脉冲宽度小于预设阈值的情况下,基于与回波信号的波形的重心位置对应的第一时间来确定脉冲光飞行时间,并且,在所确定的脉冲宽度大于预设阈值的情况下,基于与回波信号的预定前沿位置对应的第二时间来确定脉冲光飞行时间,并且,在所确定的脉冲宽度等于预设阈值的情况下,基于第一时间或者第二时间来确定脉冲光飞行时间;以及基于所确定的脉冲光飞行时间,确定在激光雷达与目标对象之间的距离。
3、根据本公开的第三方面,提出了一种车辆,包括:激光雷达,以及与激光雷达通信地耦接的车辆控制器,车辆控制器被配置为执行根据第一方面所述的测距方法。
4、根据本公开的第四方面,提出了一种电子设备,包括:处理器;以及通信耦接到处理器并且存储计算机可读指令的存储器,所述计算机可读指令在由处理器执行时,使得电子设备执行根据第一方面所述的测距方法。
5、根据本公开的第五方面,提出了一种存储有计算机可读指令的计算机可读存储介质,所述计算机可读指令在由电子设备的处理器执行时,使得电子设备执行根据第一方面所述的测距方法。
6、根据本公开的第六方面,提出了一种包括计算机可读指令的计算机程序产品,所述计算机可读指令在由电子设备的处理器执行时,使得电子设备执行根据第一方面所述的测距方法。
7、从参考附图的以下描述中,本公开其他特征和优点将变得清楚。
技术特征:
1.一种在激光雷达中使用的测距方法,其特征在于,该方法包括:
2.根据权利要求1所述的测距方法,其中,预设阈值包括以下项中的任一个:
3.根据权利要求1所述的测距方法,其中,基于与重心位置对应的第一时间来确定脉冲光飞行时间的第一确定精度随着回波信号的脉冲宽度的增大而单调地下降,基于与预定前沿位置对应的第二时间来确定脉冲光飞行时间的第二确定精度随着回波信号的脉冲宽度的增大而单调地上升,并且其中,预设阈值包括:与代表第一确定精度的第一曲线和代表第二确定精度的第二曲线的相交点对应的脉冲宽度值。
4.根据权利要求1所述的测距方法,还包括:确定与回波信号的波形的重心位置对应的第一时间,其中,确定第一时间包括:
5.根据权利要求1所述的测距方法,还包括:确定与回波信号的预定前沿位置对应的第二时间,其中,确定第二时间包括:
6.根据权利要求1所述的测距方法,其中,基于第一时间来确定脉冲光飞行时间包括:计算第一时间与有关于第一脉冲光的发射的第一发射时间之间的时间差作为脉冲光飞行时间,并且其中,基于第二时间来确定脉冲光飞行时间包括:计算第二时间与有关于第一脉冲光的发射的第二发射时间之间的时间差作为脉冲光飞行时间。
7.根据权利要求1所述的测距方法,其中,回波信号是通过对第二脉冲光进行光电转换、多级放大以及模数转换处理而得到的。
8.根据权利要求1所述的测距方法,其中,回波信号的脉冲宽度包括回波信号的半峰全宽值。
9.一种激光雷达,其特征在于,包括:
10.根据权利要求9所述的激光雷达,其中,预设阈值包括以下项中的任一个:
11.根据权利要求9所述的激光雷达,其中,基于与重心位置对应的第一时间来确定脉冲光飞行时间的第一确定精度随着回波信号的脉冲宽度的增大而单调地下降,基于与预定前沿位置对应的第二时间来确定脉冲光飞行时间的第二确定精度随着回波信号的脉冲宽度的增大而单调地上升,并且其中,所述预设阈值包括:与代表第一确定精度的第一曲线和代表第二确定精度的第二曲线的相交点对应的脉冲宽度值。
12.一种车辆,其特征在于,包括:
13.一种电子设备,其特征在于,包括:
14.一种存储有计算机可读指令的计算机可读存储介质,其特征在于,所述计算机可读指令在由电子设备的处理器执行时,使得电子设备执行根据权利要求1-8中任一项所述的测距方法。
15.一种包括计算机可读指令的计算机程序产品,其特征在于,所述计算机可读指令在由电子设备的处理器执行时,使得电子设备执行根据权利要求中1-8任一项所述的测距方法。
技术总结
公开了在激光雷达中使用的测距方法。该方法包括:接收回波信号,该回波信号与响应于从激光雷达向目标对象发射第一脉冲光而从目标对象反射的第二脉冲光对应;确定回波信号的脉冲宽度;将所确定的脉冲宽度与预设阈值进行比较,在所确定的脉冲宽度小于预设阈值的情况下,基于与回波信号的波形的重心位置对应的第一时间来确定脉冲光飞行时间,并且,在所确定的脉冲宽度大于预设阈值的情况下,基于与回波信号的预定前沿位置对应的第二时间来确定脉冲光飞行时间,并且,在所确定的脉冲宽度等于预设阈值的情况下,基于第一时间或者第二时间来确定脉冲光飞行时间;以及基于所确定的脉冲光飞行时间,确定在激光雷达与目标对象之间的距离。
技术研发人员:舒博正,赵拓,王思拨,夏冰冰,石拓
受保护的技术使用者:北京一径科技有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!