一种姿态确定方法及相关装置与流程
本申请涉及计算机,尤其涉及一种姿态确定方法及相关装置。
背景技术:
1、惯性测量单元(inertial measurement unit,imu)又可称为惯性导航系统,是一种利用惯性敏感器件、基准方向和初始的位置信息来确定运载体在惯性空间中的位置、方向和速度的自主式导航系统,其中的主要元件包括陀螺仪、加速度计和磁力计。
2、目前,很多移动终端上均安装有惯性测量单元,移动终端可根据该惯性测量单元测得的数据确定自身的姿态,进而据此辅助其它相关功能的实现,例如辅助导航功能、增强现实(augmented reality,ar)功能等实现。然而,在很多情况下,受到一些因素(如元件敏感度差等)的影响,惯性测量单元测得的数据可能存在异常,如不够稳定平滑,相应地,移动终端根据该惯性测量单元测得的数据确定的姿态也会出现异常,这对于基于移动终端的姿态实现的相关功能的效果可能产生很大的影响。
技术实现思路
1、本申请实施例提供了一种姿态确定方法及相关装置,能够对惯性测量单元测得的数据进行矫正,从而保证移动终端根据该矫正后的数据确定的姿态更加准确。
2、有鉴于此,本申请第一方面提供了一种姿态确定方法,所述方法包括:
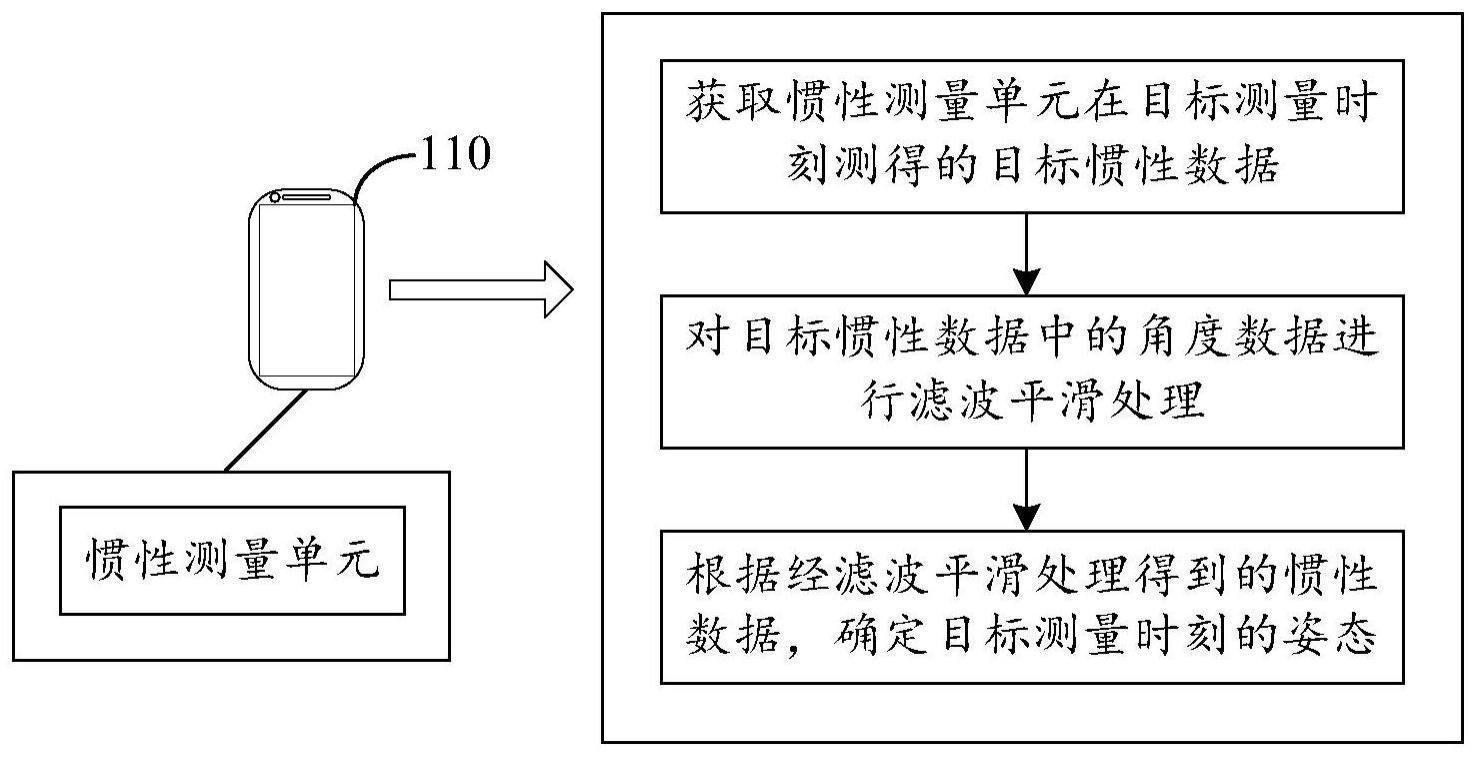
3、获取惯性测量单元在目标测量时刻测得的目标惯性数据;所述目标惯性数据包括角度数据、角速度数据和加速度数据;
4、基于所述惯性测量单元在参考测量时刻测得的参考惯性数据中的角速度数据,对所述目标惯性数据中的角度数据进行滤波平滑处理,得到所述目标测量时刻对应的优化角度数据;所述参考测量时刻为惯性数据测量过程中在所述目标测量时刻之前的测量时刻;
5、根据所述目标测量时刻对应的优化角度数据、以及所述目标惯性数据中的角速度数据和加速度数据,确定承载所述惯性测量单元的移动终端在所述目标测量时刻的姿态。
6、本申请第二方面提供了一种姿态确定装置,所述装置包括:
7、惯性数据获取模块,用于获取惯性测量单元在目标测量时刻测得的目标惯性数据;所述目标惯性数据包括角度数据、角速度数据和加速度数据;
8、惯性数据滤波模块,用于基于所述惯性测量单元在参考测量时刻测得的参考惯性数据中的角速度数据,对所述目标惯性数据中的角度数据进行滤波平滑处理,得到所述目标测量时刻对应的优化角度数据;所述参考测量时刻为惯性数据测量过程中在所述目标测量时刻之前的测量时刻;
9、姿态确定模块,用于根据所述目标测量时刻对应的优化角度数据、以及所述目标惯性数据中的角速度数据和加速度数据,确定承载所述惯性测量单元的移动终端在所述目标测量时刻的姿态。
10、本申请第三方面提供了一种电子设备,所述设备包括处理器以及存储器:
11、所述存储器用于存储计算机程序;
12、所述处理器用于根据所述计算机程序,执行如上述第一方面所述的姿态确定方法的步骤。
13、本申请第四方面提供了一种计算机可读存储介质,所述计算机可读存储介质用于存储计算机程序,所述计算机程序被处理器执行时,实现上述第一方面所述的姿态确定方法。
14、本申请第五方面提供了一种计算机程序产品,该计算机程序产品包括计算机程序,该计算机程序被处理器执行时,实现上述第一方面所述的姿态确定方法。
15、从以上技术方案可以看出,本申请实施例具有以下优点:
16、本申请实施例提供了一种姿态确定方法,在该方法中,移动终端可以先获取其中承载的惯性测量单元在目标测量时刻测得的目标惯性数据,该目标惯性数据包括角度数据、角速度数据和加速度数据;然后,移动终端可以基于该惯性测量单元在参考测量时刻(其在目标测量时刻之前)测得的参考惯性数据中的角速度数据,对该目标惯性数据中的角度数据进行滤波平滑处理,得到目标测量时刻对应的优化角度数据;进而,移动终端可以根据目标测量时刻对应的优化角度数据、以及目标惯性数据中的角速度数据和加速度数据,确定自身在目标测量时刻的姿态。实验研究表明,部分移动终端中惯性测量单元测得的惯性数据中的角度数据存在滞后、不够稳定平滑等问题,而这些惯性测量单元测得的惯性数据中的角速度数据是准确的,基于此,本申请实施例利用先前测得的惯性数据中的角速度数据,对当前测得的惯性数据中的角度数据做滤波平滑处理,从而实现对惯性数据中角度数据的矫正。进而,移动终端可以利用该矫正后的角度数据、以及惯性数据中原本就准确的角速度数据和加速度数据确定自身的姿态,从而避免因惯性数据中的角度数据不准确而导致所确定的姿态不准确的问题,即提高了所确定的移动终端的姿态的准确性,进而可以相应地提高基于移动终端的姿态实现的相关功能的实现效果。
技术特征:
1.一种姿态确定方法,其特征在于,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,所述基于所述惯性测量单元在参考测量时刻测得的参考惯性数据中的角速度数据,对所述目标惯性数据中的角度数据进行滤波平滑处理,得到所述目标测量时刻对应的优化角度数据,包括:
3.根据权利要求2所述的方法,其特征在于,所述基于所述参考测量时刻对应的优化角度数据、所述参考惯性数据中的角速度数据、以及所述目标测量时刻与所述参考测量时刻之间的时间差,对所述目标惯性数据中的角度数据进行滤波平滑处理,得到所述目标测量时刻对应的优化角度数据,包括:
4.根据权利要求2所述的方法,其特征在于,所述基于所述参考测量时刻对应的优化角度数据、所述参考惯性数据中的角速度数据、以及所述目标测量时刻与所述参考测量时刻之间的时间差,对所述目标惯性数据中的角度数据进行滤波平滑处理,得到所述目标测量时刻对应的优化角度数据,包括:
5.根据权利要求1至4任一项所述的方法,其特征在于,所述参考测量时刻是所述惯性数据测量过程中位于所述目标测量时刻之前、且与所述目标测量时刻相邻的测量时刻。
6.根据权利要求1所述的方法,其特征在于,所述方法还包括:
7.根据权利要求6所述的方法,其特征在于,所述异常设备名单是通过以下方式构建的:
8.根据权利要求7所述的方法,其特征在于,所述针对每个所述测试设备,根据所述测试设备对应的测试惯性数据组,确定所述测试设备对应的惯性测量特征;检测所述测试设备对应的惯性测量特征是否异常,若是,则将所述测试设备的设备信息添加至所述异常设备名单,包括:
9.根据权利要求1所述的方法,其特征在于,所述方法还包括:
10.根据权利要求9所述的方法,其特征在于,所述根据所述移动终端在所述目标测量时刻的姿态、以及所述移动终端的摄像头在所述目标测量时刻拍摄的目标图像,确定所述目标图像中的目标平面,包括:
11.一种姿态确定装置,其特征在于,所述装置包括:
12.根据权利要求11所述的装置,其特征在于,所述惯性数据滤波模块具体用于:
13.一种电子设备,其特征在于,所述设备包括处理器及存储器;
14.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质用于存储计算机程序,所述计算机程序被处理器执行时,实现权利要求1至10中任一项所述的姿态确定方法。
15.一种计算机程序产品,包括计算机程序,其特征在于,所述计算机程序被处理器执行时,实现权利要求1至10中任一项所述的姿态确定方法。
技术总结
本申请实施例公开了一种姿态确定方法及相关装置,其中该方法包括:获取惯性测量单元在目标测量时刻测得的目标惯性数据,目标惯性数据包括角度数据、角速度数据和加速度数据;基于惯性测量单元在参考测量时刻测得的参考惯性数据中的角速度数据,对目标惯性数据中的角度数据进行滤波平滑处理,得到目标测量时刻对应的优化角度数据,参考测量时刻在目标测量时刻之前;根据目标测量时刻对应的优化角度数据、以及目标惯性数据中的角速度数据和加速度数据,确定承载惯性测量单元的移动终端在目标测量时刻的姿态。该方法能够对惯性测量单元测得的数据进行矫正,保证移动终端根据矫正后的数据确定的姿态更准确。
技术研发人员:刘惠民,郑远力
受保护的技术使用者:腾讯科技(深圳)有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!