用于调制雷达传感器的时间参数的方法和装置与流程
本申请涉及雷达传感器,特别涉及一种动态地调制车辆上的雷达传感器的时间参数的方法和装置。
背景技术:
1、当前,雷达传感器普遍应用在车辆上,尤其是在自动驾驶的自主车辆上。通常,在同一车辆内的不同位置处会安装多个雷达传感器。这些雷达传感器在同一车辆内彼此独立地满足多种不同的任务,例如测量至前方行驶的车辆的距离、检测行车道边缘处的行人和道路上的障碍物、盲区探测、车道保持和变道辅助、刹车辅助、车辆后方空间监测、泊车辅助等。然而,随着雷达信号源数量的增加,由不同雷达传感器发送的雷达信号之间发生干扰的可能性也随之增加。
2、通过为车辆上的各个雷达传感器分配固定的时隙,使得各个雷达传感器的工作时间错开来降低各个雷达传感器之间的干扰,但这样的固定时隙分配会导致在一个雷达传感器工作时,其它雷达传感器闲置,导致雷达传感器的探测频率降低并造成资源浪费。
3、因此,希望提供一种改进的技术方案来解决现有技术中的上述问题。
技术实现思路
1、针对以上问题,本申请旨在提出一种用于动态调制车辆上的雷达传感器的时间参数的方法和装置及计算机程序产品。根据本申请的技术,通过在不同场景下动态地计算车辆上的每个雷达传感器的时间偏移,使得至少同一车辆的不同雷达传感器发送的雷达信号不会导致干扰且改进资源利用率。
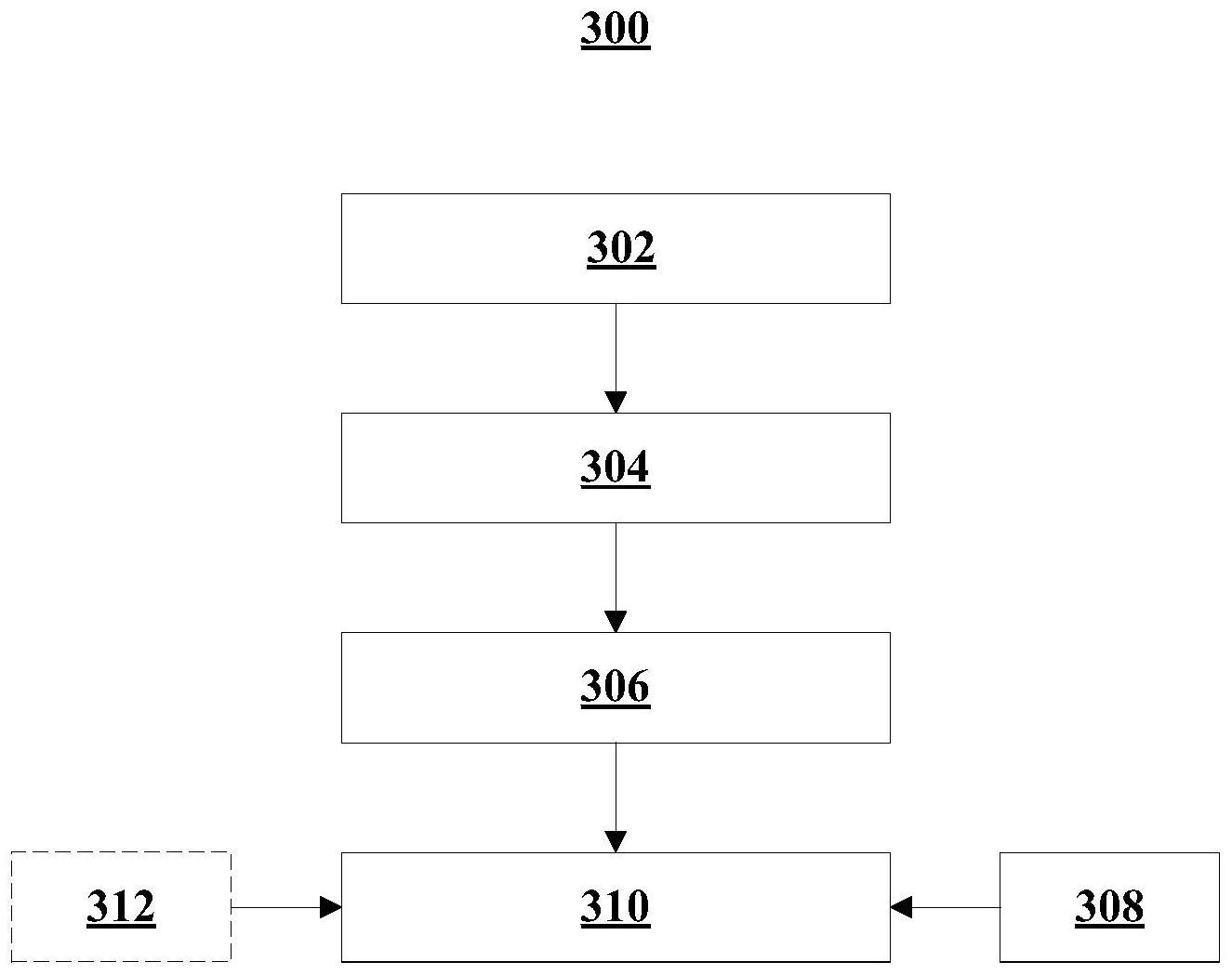
2、根据本申请的一个方面,提供了一种用于动态调制车辆上的雷达传感器的时间参数的方法,包括:获取所述车辆的当前车速;获取当前点云数量;至少基于所述车辆的当前车速、所述当前点云数量计算所述雷达传感器的时间偏差;获取基准时间;以及基于计算的时间偏差和基准时间来更新所述雷达传感器的时间参数。
3、根据本申请的另一个方面,提供了一种用于动态调制车辆上的雷达传感器的时间参数的装置,包括:车速获取模块,用于获取所述车辆的当前车速;点云数量获取模块,用于获取当前点云数量;计算模块,用于至少基于所述车辆的车速、所述点云数量计算所述雷达传感器的时间偏差;基准时间获取模块,用于获取基准时间;以及更新模块,用于基于计算的时间偏差和基准时间来更新所述雷达传感器的时间参数。
4、本申请还提供了一种用于动态调制车辆上的雷达传感器的时间参数的装置。所述装置包括:至少一个处理器;以及存储计算机可执行指令的存储器,所述计算机可执行指令在被执行时使得所述至少一个处理器实施上文所述的用于动态调制车辆上的雷达传感器的时间参数的方法。
5、本申请还提供了一种用于动态调制车辆上的雷达传感器的时间参数的计算机程序产品。所述计算机程序产品包括计算机程序,所述计算机程序被至少一个处理器执行用于实施上文所述的用于动态调制车辆上的雷达传感器的时间参数的方法。
6、通过动态地计算雷达传感器的时间偏移,在高性能需求场景下(例如车辆高速行驶的时候)可以减小时间偏移,以使得各雷达传感器能更频繁地进行探测,从而增加探测精确度;而在低性能需求场景(例如车辆低速行驶的时候)可以增大雷达传感器的时间偏移,以使得各雷达传感器降低探测或扫描频率,从而降低计算工作负载以及节省资源。因此,利用本申请的动态调制雷达传感器的时间参数的方案,可以更灵活地改善雷达传感器的工作效率并降低工作负载。
技术特征:
1.一种用于动态调制车辆上的雷达传感器的时间参数的方法,包括:
2.根据权利要求1所述的方法,其中,所述时间偏差是进一步基于所述车辆的预定车速因子和所述雷达传感器的预定位置因子来计算的。
3.根据权利要求2所述的方法,所述时间偏差是基于以下算式计算的:
4.根据权利要求1所述的方法,其中,所述当前点云数量是通过所述雷达传感器实时测量生成的。
5.根据权利要求1所述的方法,还包括:
6.一种用于动态调制车辆上的雷达传感器的时间参数的装置,包括:
7.根据权利要求6所述的装置,其中,所述时间偏差是进一步基于所述车辆的预定车速因子和所述雷达传感器的预定位置因子来计算的。
8.根据权利要求7所述的装置,其中,所述计算模块进一步基于以下算式来计算所述时间偏差:
9.根据权利要求6所述的装置,其中,所述当前点云数量是通过所述雷达传感器实时测量获得的。
10.根据权利要求6所述的装置,还包括:
11.一种用于动态调制车辆上的雷达传感器的时间参数的装置,包括:
12.一种用于动态调制车辆上的雷达传感器的时间参数的计算机程序产品,包括计算机程序,所述计算机程序被至少一个处理器执行以用于实施根据权利要求1至5中任一项所述的方法。
技术总结
本申请提出了一种用于动态调制车辆上的雷达传感器的时间参数的方法,包括:获取所述车辆的当前车速;获取当前点云数量;至少基于所述车辆的当前车速、所述当前点云数量计算所述雷达传感器的时间偏差;获取基准时间;以及基于计算的时间偏差和基准时间来更新所述雷达传感器的时间参数。
技术研发人员:迟永昊,唐诗晨
受保护的技术使用者:罗伯特·博世有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!