一种高精地图的路网生成方法、系统及设备与流程
本发明涉及交通,尤其涉及一种高精地图的路网生成生成方法、系统及设备。
背景技术:
1、v2x(vehicle to everything),即车体能够与其他车体及智能设备相互传输信息流的技术。其希望实现车辆与一切可能影响车辆的实体实现信息交互,目的是减少事故发生,减缓交通拥堵,降低环境污染以及提供其他信息服务。
2、广域互联的信息共享和操作协同。这依赖v2x系统来实现。依赖智能终端中的通讯模块,车辆与车辆之间,车辆与路边基础交通设施(如路灯、监控摄像头等)之间,车辆与人(随身智能终端)等可以实现信息交互共享,别的终端“看到”的你也能“看到”,别的终端的决策也影响你的决策,最终实现“千手千眼,浑然一体”的全方位观察和一体化调度控制。其中要实现车辆与路边基础交通设施(如路灯、监控摄像头等)之间和车辆与人(随身智能终端)等可以实现信息交互共享需要rsu(road side unit)路侧单元的支持,rsu能汇聚路侧交通设施和道路交通参与者的信息,上传至v2x平台,并可将路侧交通设备信息通过v2x消息广播给道路交通参与者。
3、目前,rsu广播的msg_map消息需要人工通过云控平台或rsu本地配置,此方式配置的msg_map消息具有较高的精确性,能准确描述路口停止线位置、车道中心位置的坐标点阵和车道宽度等信息。但是,随着未来rsu部署量的大量增加,为每个rsu配置当前服务范围的路网地图时需要大量的劳动力成本。因此,针对大量部署rsu后配置路网地图的方法亟需解决。
技术实现思路
1、本发明提供一种高精地图的路网生成生成方法、系统及设备,其主要目的在于解决现有技术中随着未来rsu部署量的大量增加,为每个rsu配置当前服务范围的路网地图时需要大量的劳动力成本。
2、第一方面,本发明实施例提供高精地图的路网生成生成方法,包括:
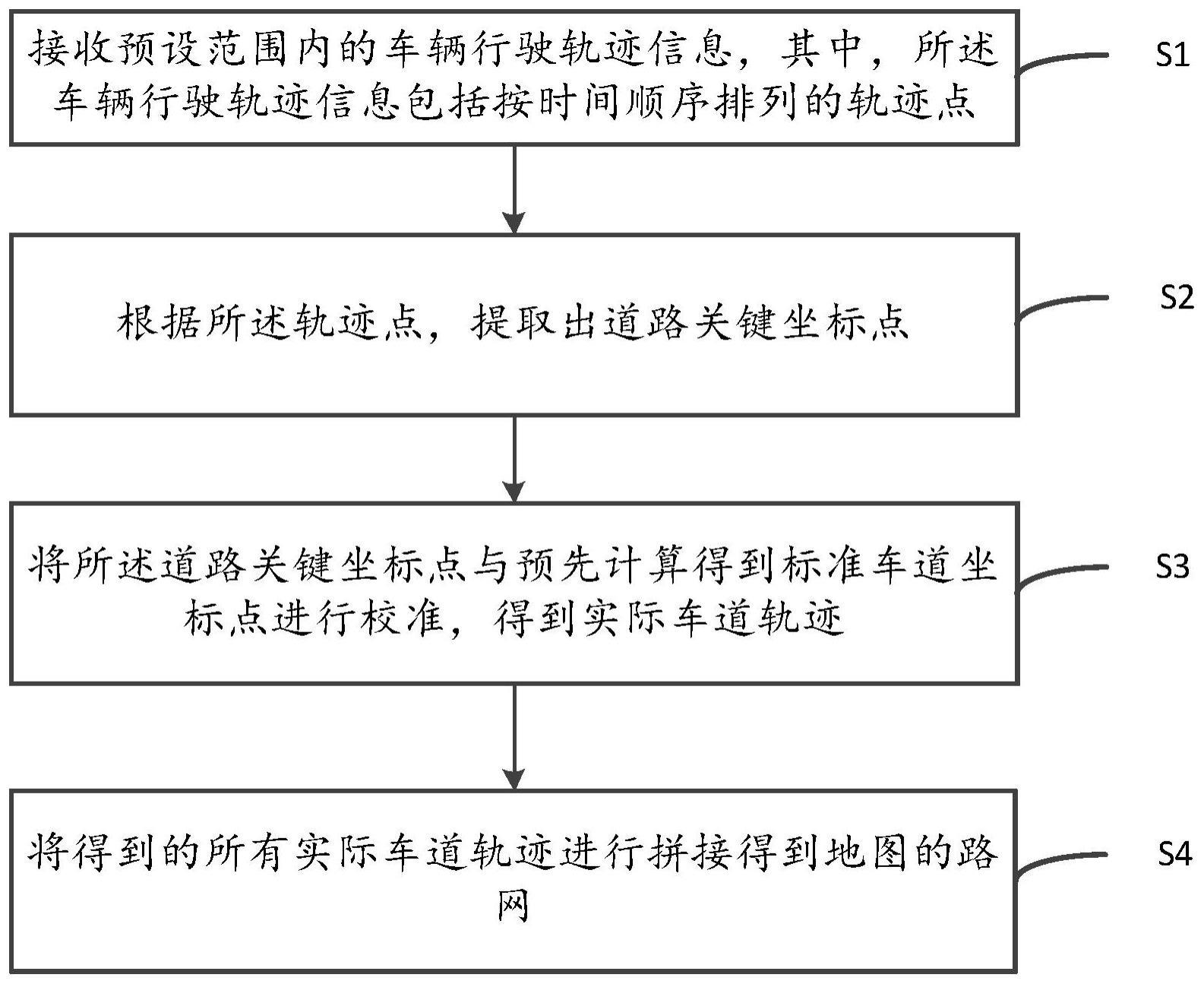
3、s1、接收预设范围内的车辆行驶轨迹信息,其中,所述车辆行驶轨迹信息包括按时间顺序排列的轨迹点;
4、s2、根据所述轨迹点,提取出道路关键坐标点;
5、s3、将所述道路关键坐标点与预先计算得到标准车道坐标点进行校准,得到实际车道轨迹;
6、s4、将得到的所有实际车道轨迹进行拼接得到地图的路网。
7、优选地,步骤s2具体包括:
8、将相邻两个轨迹点进行连线;
9、计算各连线距离预先计算得到的标准车道中心线的最大垂直距离;
10、选取所述最大垂直距离小于预设距离阈值对于的轨迹点作为道路关键坐标点。
11、优选地,标准车道中心线的计算步骤如下:
12、获取预设数量同样行驶轨迹的车辆轨迹样本;
13、根据所述车辆轨迹样本的密集位置,得到该行驶轨迹对应的标准车道中心线,其中,所述标准车道中心线上的轨迹点即为标准车道坐标点。
14、优选地,所述步骤s3具体包括:
15、根据所述道路关键坐标点和标准车道坐标点,建立直角坐标系,分别得到道路关键坐标曲线和标准车道坐标曲线;
16、将所述道路关键坐标曲线和标准车道坐标曲线进行曲线拟合,得到拟合后的实际车道轨迹。
17、优选地,所述将所述道路关键坐标曲线和标准车道坐标曲线进行曲线拟合的步骤,具体包括:
18、将所述道路关键坐标曲线和标准坐标曲线按照预设距离进行分段处理;
19、对每一段内的道路关键坐标曲线和标准坐标曲线,用最小二乘法进行曲线拟合。
20、优选地,所述最小二乘法的目标拟合计算公式为:y=ax^2+bx+c;
21、其中,y为坐标系中y轴坐标值,x为坐标系中x轴坐标值,a、b和c均为需要经过拟合计算得出的参数。
22、优选地,预设距离阈值为1米。
23、第二方面,本发明实施例提供一种高精地图的路网生成生成系统,包括:
24、接收模块,用于接收预设范围内的车辆行驶轨迹信息,其中,所述车辆行驶轨迹信息包括按时间顺序排列的轨迹点;
25、提取模块,用于根据所述轨迹点,提取出道路关键坐标点;
26、校准模块,用于将所述道路关键坐标点与预先计算得到标准车道坐标点进行校准,得到实际车道轨迹;
27、生成模块,用于将得到的所有实际车道轨迹进行拼接得到地图的路网。
28、优选地,提取模块包括:
29、计算单元,用于将相邻两个轨迹点的进行连线;计算各连线距离预先计算得到的标准车道中心线的最大垂直距离;
30、提取单元,用于选取所述最大垂直距离小于预设距离阈值对应的轨迹点作为道路关键坐标点。
31、第三方面,本发明实施例还提供一种计算机设备,包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现上述高精地图的路网生成生成方法的步骤:
32、本发明提出的高精地图的路网生成生成方法、系统及设备,通过接收到的车辆轨迹点,并提取出道路关键坐标点,然后根据道路关键坐标点与预先计算得到标准车道坐标点进行校准,得到实际车道轨迹,最后将所有实际车道轨迹进行连线就可以得到路网,该方式不再需要人工进行配置车道的线路信息,仅需根据车辆行驶轨迹就可以自动生成描述车道的线路地图。
技术特征:
1.一种高精地图的路网生成方法,其特征在于,包括:
2.根据权利要求1所述的高精地图的路网生成方法,其特征在于,所述步骤s2具体包括:
3.根据权利要求2所述的高精地图的路网生成方法,其特征在于,所述标准车道中心线的计算步骤如下:
4.根据权利要求3所述的高精地图的路网生成方法,其特征在于,所述步骤s3具体包括:
5.根据权利要求4所述的高精地图的路网生成方法,其特征在于,所述将所述道路关键坐标曲线和标准车道坐标曲线进行曲线拟合的步骤,具体包括:
6.根据权利要求5所述的高精地图的路网生成方法,其特征在于,所述最小二乘法的目标拟合计算公式为:y=ax^2+bx+c;
7.根据权利要求2所述的高精地图的路网生成方法,其特征在于,所述预设距离阈值为1米。
8.一种高精地图的路网生成系统,其特征在于,包括:
9.根据权利要求8所述的高精地图的路网生成系统,其特征在于,所述提取模块包括:
10.一种计算机设备,包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,其特征在于,所述处理器执行所述计算机程序时实现如权利要求1至7中任一项所述高精地图的路网生成的步骤。
技术总结
本发明提出一种高精地图的路网生成方法、系统及设备,该方法包括:S1、接收预设范围内的车辆行驶轨迹信息,其中,所述车辆行驶轨迹信息包括按时间顺序排列的轨迹点;S2、根据所述轨迹点,提取出道路关键坐标点;S3、将所述道路关键坐标点与预先计算得到标准车道坐标点进行校准,得到实际车道轨迹;S4、将得到的所有实际车道轨迹进行拼接得到地图的路网;该方法不再需要人工进行配置车道的线路信息,仅需根据车辆行驶轨迹就可以自动生成描述车道的线路地图。
技术研发人员:潘庆麟
受保护的技术使用者:深圳联友科技有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!