用于修正挂车的位置和姿态的方法和装置与流程
本公开总体上涉及车辆定位的,更具体地,涉及用于修正挂车的位置和姿态的方法和装置。
背景技术:
1、由牵引车和挂车组成的诸如半挂车的车辆在道路运输中被广泛使用。这样的车辆由于其挂车的尺寸较大(通常长度大于10米),因此通常设置有用于辅助驾驶甚或自动驾驶的定位设备。例如,在车辆的倒车过程中,尤其是在倒车入库场景中,挂车的定位是否精准,是决定车辆是否能准确到达指定位置的关键因素。
2、在现有技术中,存在两种方式用于获取挂车的定位,即挂车的位置和姿态(例如,朝向)。第一种方式基于设置在牵引车上的高精度定位设备确定的牵引车的位置和姿态以及牵引车和挂车的朝向之间的夹角来计算挂车的位置和姿态。这种定位方式的精度极大地依赖于牵引车和挂车的朝向之间的夹角,难以达到很高的精度。第二种方式通过直接在挂车上安装诸如惯性导航设备的高精度定位设备来获取挂车的位置和姿态。这种定位方式在牵引车和挂车上分别设置高精度定位设备,虽然以成本为代价提高了定位精度,但是难以满足大规模商业化的要求。
3、因此,仍需要一种能够在不显著提高成本的情况下准确地确定挂车的位置和姿态的技术。
技术实现思路
1、本公开提出了一种用于修正挂车的位置和姿态的技术,无需在挂车上安装高精度定位设备即可以准确地确定挂车的位置和姿态,从而在保证定位精度的同时降低成本,利于大规模商业化部署。
2、在下文中将给出关于本公开的简要概述,以便提供关于本公开的某些方面的基本理解。应当理解,此概述并非是关于本公开的穷举性概述,也并非意图确定本公开的关键或重要部分或者限定本公开的范围。其目的仅仅是以简化的形式给出某些概念,以此作为稍后论述的更详细描述的前序。
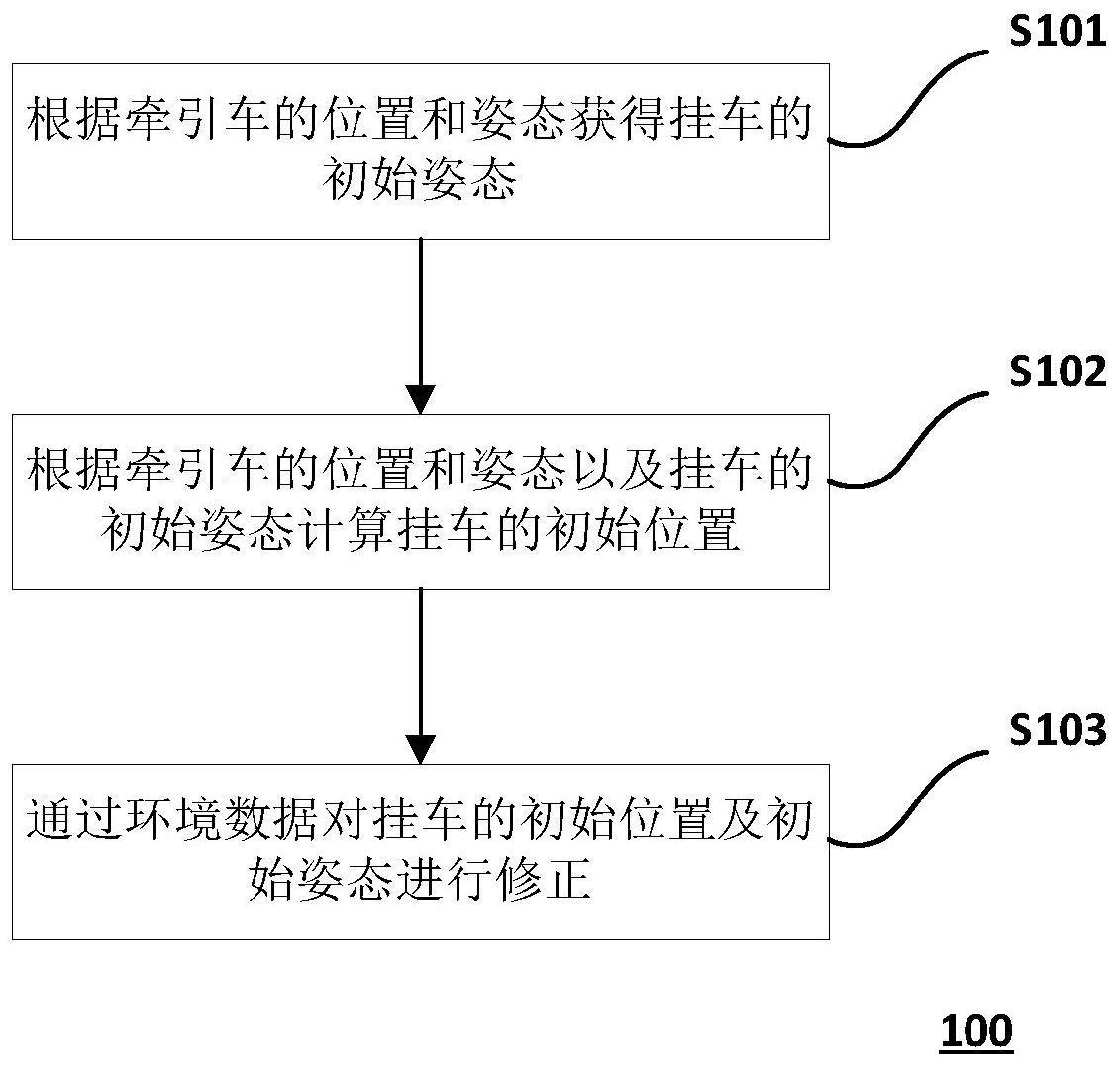
3、根据本公开的一个方面,提供了一种用于修正挂车的位置和姿态的方法,其中挂车由牵引车牵引,牵引车设置有定位设备,用于获得牵引车的位置和姿态,挂车设置有传感器,用于获得环境数据,该方法包括:根据牵引车的位置和姿态获得挂车的初始姿态;根据牵引车的位置和姿态以及挂车的初始姿态计算挂车的初始位置;及通过环境数据对挂车的初始位置及初始姿态进行修正。
4、根据本公开的另一方面,提供了一种用于修正挂车的位置和姿态的装置,其中挂车由牵引车牵引,牵引车设置有定位设备,用于获得牵引车的位置和姿态,挂车设置有传感器,用于获得环境数据,该装置包括:计算模块,被配置成根据牵引车的位置和姿态获得挂车的初始姿态,以及根据牵引车的位置和姿态以及挂车的初始姿态计算挂车的初始位置;及修正模块,被配置成通过环境数据对挂车的初始位置及初始姿态进行修正。
5、根据本公开的另一方面,提供了一种能够实现上述的用于修正挂车的位置和姿态的方法的计算机程序。此外,还提供了具有至少计算机可读介质形式的计算机程序产品,其上记录有用于实现上述的用于修正挂车的位置和姿态的方法的计算机程序代码。
6、根据本公开的另一方面,提供了一种电子装置,其包括处理器以及存储器,存储器上存储有程序,该程序在被处理器执行时使得处理器执行上述的用于修正挂车的位置和姿态的方法。
7、根据本公开的另一方面,提供了一种存储有程序的计算机可读存储介质,其程序包括指令,其指令在由计算装置的一个或更多个处理器执行时,使计算装置执行上述的用于修正挂车的位置和姿态的方法。
8、电子装置,其包括处理器以及存储器,存储器上存储有程序,该程序在被处理器执行时使得处理器执行上述的用于修正挂车的位置和姿态的方法。
9、根据本公开的另一方面,提供了一种车辆,包括牵引车和挂车;其中牵引车设置有一个或更多个处理器以及存储程序的存储器,程序包括指令,指令在由处理器执行时使处理器执行上述的用于修正挂车的位置和姿态的方法。
10、根据本公开的用于修正挂车的位置和姿态的技术,无需在挂车上设置高成本的高精度定位设备,通过设置在牵引车上的高精度定位设备与设置在挂车上的低成本的传感器协同操作来准确地确定挂车的位置和姿态,从而在保证定位精度的同时降低成本,利于大规模商业化部署。
技术特征:
1.一种用于修正挂车的位置和姿态的方法,其中,所述挂车由牵引车牵引,所述牵引车设置有定位设备,用于获得所述牵引车的位置和姿态,所述挂车设置有传感器,用于获得环境数据,所述方法包括:
2.根据权利要求1所述的方法,其中,所述挂车的初始姿态包括所述挂车的初始朝向,且所述牵引车的姿态包括所述牵引车的朝向,所述方法更包括;
3.根据权利要求2所述的方法,其中,所述夹角通过激光雷达或角度传感器获得。
4.根据权利要求1所述的方法,其中,所述根据所述牵引车的位置和姿态以及所述挂车的初始姿态计算所述挂车的初始位置更包括:
5.根据权利要求4所述的方法,其中,所述牵引车和所述挂车之间具有铰接点,所述距离参数包括所述牵引车的中心点到所述铰接点的距离,以及所述挂车的中心点到所述铰接点的距离。
6.根据权利要求1所述的方法,其中,通过所述环境数据对所述挂车的初始位置和初始姿态进行修正包括:
7.根据权利要求6所述的方法,其中,所述标志物具有直线形状。
8.根据权利要求7所述的方法,其中,所述标志物包括车道线或车库线。
9.根据权利要求6所述的方法,其中,使用深度学习算法从所述图像中提取所述标志物。
10.根据权利要求6所述的方法,其中,根据所述图像获得所述挂车相对于所述标志物的参考位置和方向包括:
11.根据权利要求1所述的方法,其中,所述传感器包括摄像设备或激光雷达。
12.根据权利要求1所述的方法,其中通过所述环境数据对所述挂车的初始位置和初始姿态进行修正后,得到所述挂车修正后的位置和姿态,其中所述挂车于修正后的位置时的车尾位置为第一位置,所述挂车于初始位置时的车尾位置为第二位置,其中当所述第一位置与所述第二位置之间的距离小于等于预定距离时,将所述挂车修正后的位置确定为所述挂车的位置,其中当所述第一位置与所述第二位置之间的距离大于所述预定距离时,将所述挂车的初始位置确定为所述挂车的位置。
13.根据权利要求12所述的方法,其中所述预定距离为10厘米。
14.根据权利要求1所述的方法,其中通过所述环境数据对所述挂车的初始位置和初始姿态进行修正后,得到所述挂车修正后的位置和姿态,其中所述挂车的初始姿态包括所述挂车的初始朝向,所述挂车修正后的姿态包括所述挂车修正后的朝向,其中当所述挂车的初始朝向与所述挂车修正后的朝向之间的夹角小于等于预定角度时,将所述挂车修正后的姿态确定为所述挂车的姿态,其中当所述挂车的初始朝向与所述挂车修正后的朝向之间的夹角大于所述预定角度时,将所述挂车的初始姿态确定为所述挂车的姿态。
15.根据权利要求14所述的方法,其中所述预定角度为0.3度。
16.根据权利要求1所述的方法,其中,所述定位设备包括全球定位系统,且所述定位设备通过获取地图数据以获得所述牵引车的位置和姿态。
17.一种用于修正挂车的位置和姿态的装置,其中,所述挂车由牵引车牵引,所述牵引车设置有定位设备,用于获得所述牵引车的位置和姿态,所述挂车设置有传感器,用于获得环境数据,所述装置包括:
18.一种存储有程序的计算机可读存储介质,所述程序包括指令,所述指令在由计算装置的一个或更多个处理器执行时,使所述计算装置执行根据权利要求1至16中任一项所述的方法。
19.一种车辆,包括:
技术总结
本公开涉及用于修正挂车的位置和姿态的方法和装置。挂车由牵引车牵引,牵引车设置有定位设备,用于获得牵引车的位置和姿态,挂车设置有传感器,用于获得环境数据。本公开提出的方法包括:根据牵引车的位置和姿态获得挂车的初始姿态;根据牵引车的位置和姿态以及挂车的初始姿态计算挂车的初始位置;及通过环境数据对挂车的初始位置及初始姿态进行修正。根据本公开的用于修正挂车的位置和姿态的技术,无需在挂车上安装高精度定位设备即可以准确地确定挂车的位置和姿态,从而低成本地保证定位精度。
技术研发人员:季开进,王乃岩
受保护的技术使用者:北京图森智途科技有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!