辐射巡测机器人测试方法、装置以及存储介质与流程
本公开涉及辐射应急处理,尤其涉及一种辐射巡测机器人测试方法、装置以及存储介质。
背景技术:
1、核电厂等大型核设施发生超设计基准的严重核事故时,可能向环境释放大量放射性物质。这些放射性物质通过烟羽、吸入、食入等途径使得应急人员和(或)公众受到照射。事故应急的不同阶段,均需要及时、充分、准确的获取各类监测数据。与人工监测作业方式相比,无人车载监测实施作业方式,测量速度快范围大、采样类型广、受地形限制小、排障能力强、极大提高工作效率的同时,保障及时、准确获得数据。因此,巡测机器人性能好坏直接影响辐射探测的结果。
技术实现思路
1、本申请提出了一种辐射巡测机器人测试方法、装置以及存储介质,旨在至少在一定程度上解决相关技术中的技术问题之一。
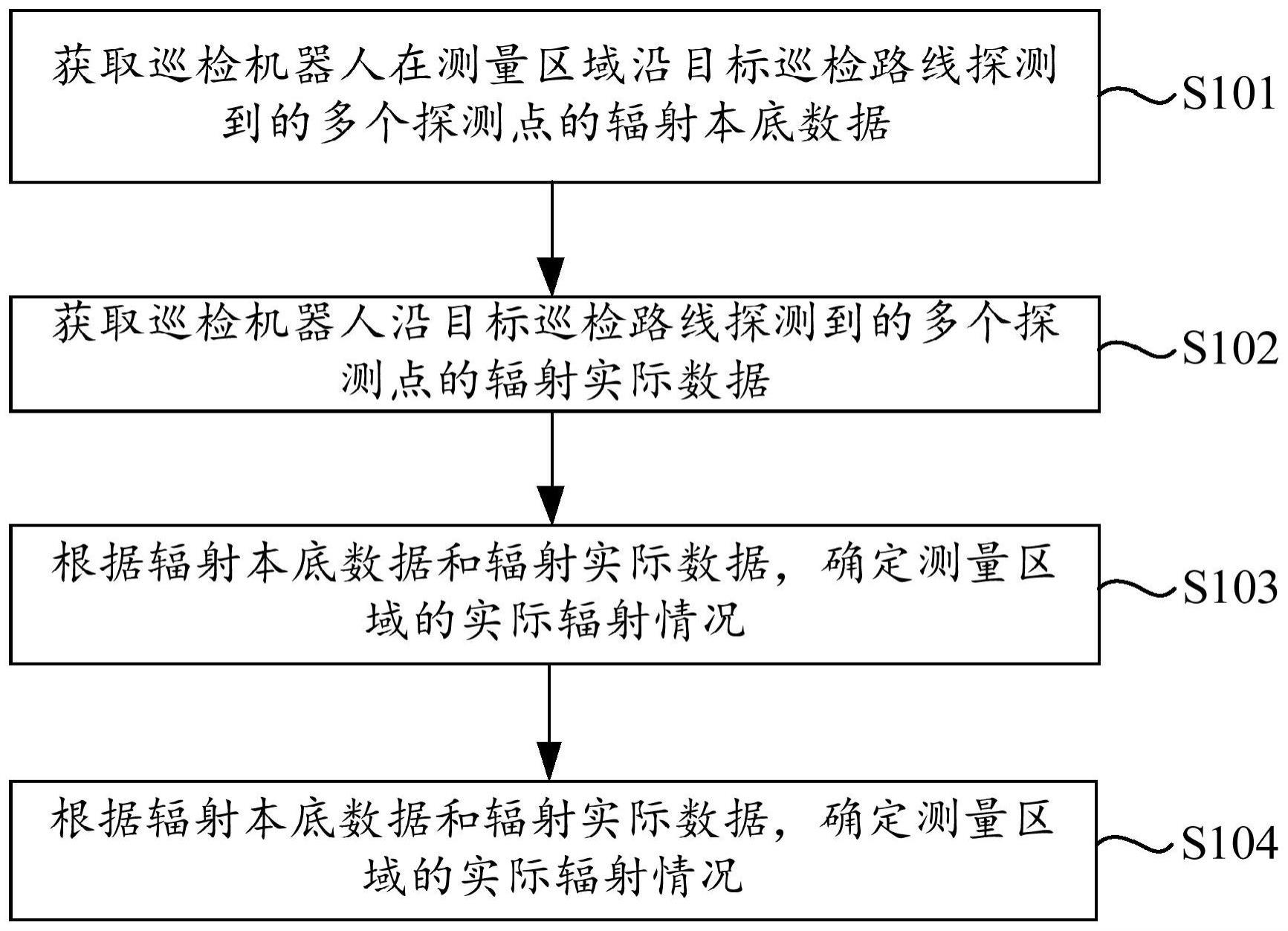
2、本申请第一方面实施例提出了一种辐射巡测机器人测试方法,包括:获取巡测机器人在测量区域沿目标巡检路线探测到的多个探测点的辐射本底数据,其中,辐射本底数据是测量区域未设置辐射点源时探测到的;获取巡测机器人沿目标巡检路线探测到的多个探测点的辐射实际数据,其中,辐射实际数据是测量区域设置辐射点源时探测到的;根据辐射本底数据和辐射实际数据,确定测量区域的实际辐射情况;以及将实际辐射情况与理论辐射情况进行比较,确定巡测机器人的性能。
3、本申请第二方面实施例提出了一种辐射巡测机器人测试装置,包括:第一获取模块,用于获取巡测机器人在测量区域沿目标巡检路线探测到的多个探测点的辐射本底数据,其中,辐射本底数据是测量区域未设置辐射点源时探测到的;第二获取模块,用于获取巡测机器人沿目标巡检路线探测到的多个探测点的辐射实际数据,其中,辐射实际数据是测量区域设置辐射点源时探测到的;第一确定模块,用于根据辐射本底数据和辐射实际数据,确定测量区域的实际辐射情况;以及比较模块,用于将实际辐射情况与理论辐射情况进行比较,确定巡测机器人的性能。
4、本申请第三方面实施例提出了一种电子设备,包括:至少一个处理器;以及与所述至少一个处理器通信连接的存储器;其中,所述存储器存储有可被所述至少一个处理器执行的指令,所述指令被所述至少一个处理器执行,以使所述至少一个处理器能够执行本申请实施例的辐射巡测机器人测试方法。
5、本申请第四方面实施例提出了一种存储有计算机指令的非瞬时计算机可读存储介质,所述计算机指令用于使所述计算机执行本申请实施例公开的辐射巡测机器人测试方法。
6、本实施例中,通过获取巡测机器人在测量区域沿目标巡检路线探测到的多个探测点的辐射本底数据,并获取巡测机器人沿目标巡检路线探测到的多个探测点的辐射实际数据,并根据辐射本底数据和辐射实际数据,确定测量区域的实际辐射情况,以及将实际辐射情况与理论辐射情况进行比较,确定巡测机器人的性能,能够根据巡测机器人在没有辐射源时探测的本底数据和有辐射源时探测的实际数据确定测量区域的实际辐射情况,并将实际辐射情况与理论辐射情况进行比较,从而可以测试巡测机器人探测性能,有利于提升巡测机器人在实际辐射探测工作中的探测效果。
7、本公开附加的方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本公开的实践了解到。
技术特征:
1.一种辐射巡测机器人测试方法,其特征在于,所述方法包括:
2.如权利要求1所述的方法,其特征在于,其中,所述辐射点源设置在距离所述测量区域地面目标高度处,所述目标巡检路线为所述地面上距离所述辐射点源目标距离的路线。
3.如权利要求2所述的方法,其特征在于,所述获取所述巡测机器人沿所述目标巡检路线探测到的所述多个探测点的辐射实际数据之前,还包括:
4.如权利要求1所述的方法,其特征在于,所述确定所述辐射点源在所述多个探测点的实际辐射情况之前,还包括:
5.如权利要求1所述的方法,其特征在于,所述方法还包括:
6.如权利要求1所述的方法,其特征在于,所述方法还包括:
7.一种辐射巡测机器人测试装置,其特征在于,包括:
8.如权利要求7所述的装置,其特征在于,其中,所述辐射点源设置在距离所述测量区域地面目标高度处,所述目标巡检路线为所述地面上距离所述辐射点源目标距离的路线。
9.如权利要求7所述的装置,其特征在于,所述装置还包括:
10.一种存储有计算机指令的非瞬时计算机可读存储介质,其中,所述计算机指令用于使所述计算机执行根据权利要求1-6中任一项所述的方法。
技术总结
本公开提出一种辐射巡测机器人测试方法、装置以及存储介质,该方法包括:获取巡测机器人在测量区域沿目标巡检路线探测到的多个探测点的辐射本底数据,并获取巡测机器人沿目标巡检路线探测到的多个探测点的辐射实际数据,并根据辐射本底数据和辐射实际数据,确定测量区域的实际辐射情况,以及将实际辐射情况与理论辐射情况进行比较,确定巡测机器人的性能,能够根据巡测机器人在没有辐射源时探测的本底数据和有辐射源时探测的实际数据确定测量区域的实际辐射情况,并将实际辐射情况与理论辐射情况进行比较,从而可以测试巡测机器人探测性能,有利于提升巡测机器人在实际辐射探测工作中的探测效果。
技术研发人员:仲崇军,曹磊,禹继芳,李璟涛,王遥,宁莎莎
受保护的技术使用者:国家电投集团电站运营技术(北京)有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!