一种基于虚拟网格的测距方法与清洁机器人与流程
本申请涉及智能家电的,具体而言,涉及一种基于虚拟网格的测距方法与清洁机器人。
背景技术:
1、现有技术中,清洁机器人一般采用激光测距组件检测周围的障碍物与自身的实际距离,但这种测距方法仅适用于基于实际距离判断是否需要避让,并不能辨析对应障碍物的类型或障碍物底部的实际位置。由此,基于视觉识别技术的清洁机器人应运而生,该类清洁机器人通常采用双目摄像头或3d tof技术来完成测距任务,其耗费的成本较高且观测的视场角较小,同时存在一定的视觉盲区,在实际测距时容易造成不小的误差。
技术实现思路
1、本申请的目的在于提供一种基于虚拟网格的测距方法与清洁机器人,其通过利用陀螺仪与摄像头检测实时数据、并配合使用距离矩阵表的方法提高了清洁机器人在运行过程中测距的准确性与避障性能。
2、本申请的实施例是这样实现的:
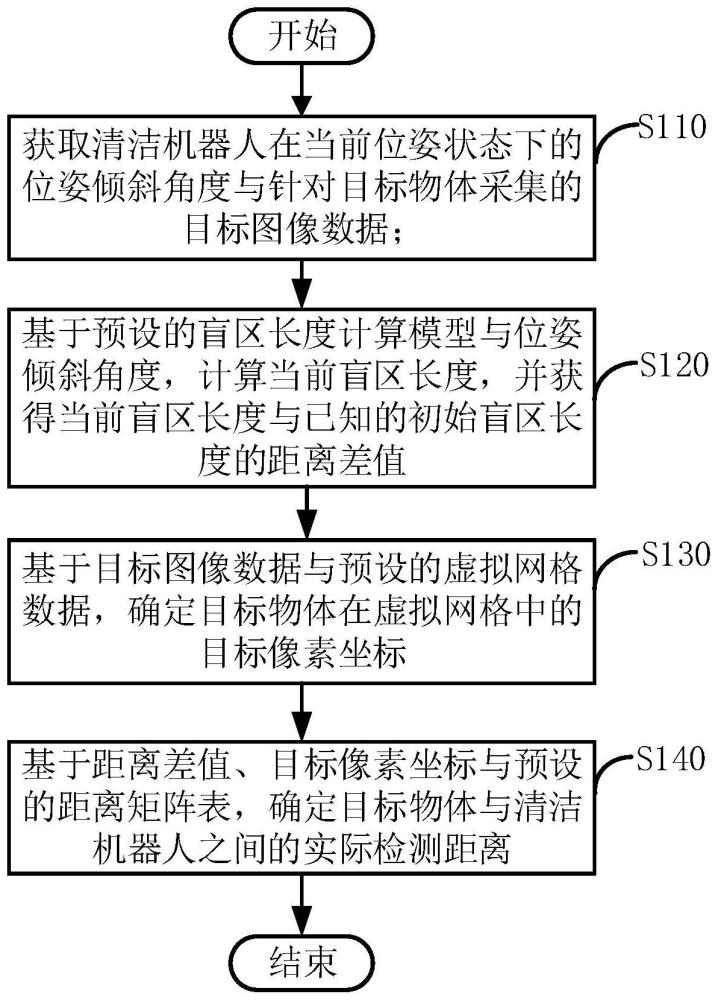
3、本申请实施例第一方面提供了一种基于虚拟网格的测距方法,该方法包括:获取清洁机器人在当前位姿状态下的位姿倾斜角度与针对目标物体采集的目标图像数据;基于预设的盲区长度计算模型与位姿倾斜角度,计算当前盲区长度,并获得当前盲区长度与已知的初始盲区长度的距离差值;基于目标图像数据与预设的虚拟网格数据,确定目标物体在虚拟网格中的目标像素坐标;基于距离差值、目标像素坐标与预设的距离矩阵表,确定目标物体与清洁机器人之间的实际检测距离。
4、于一实施例中,基于距离差值、目标像素坐标与预设的距离矩阵表,确定目标物体与清洁机器人之间的实际检测距离,包括:基于距离差值,对预设的距离矩阵表中各个像素坐标对应的检测距离进行校准;基于目标像素坐标与校准后的距离矩阵表,确定目标物体与清洁机器人之间的实际检测距离。
5、于一实施例中,基于距离差值、目标像素坐标与预设的距离矩阵表,确定目标物体与清洁机器人之间的实际检测距离,包括:基于目标像素坐标与预设的距离矩阵表中各个像素坐标对应的检测距离,确定目标物体与清洁机器人之间的初始检测距离;基于距离差值与初始检测距离,计算目标物体与清洁机器人之间的实际检测距离。
6、于一实施例中,基于预设的盲区长度计算模型与位姿倾斜角度,计算当前盲区长度,并获得当前盲区长度与已知的初始盲区长度的距离差值,包括:基于位姿倾斜角度与摄像头的安装倾斜角度,计算摄像头的总倾斜角度;将总倾斜角度输入预设的盲区长度计算模型中,获得当前盲区长度;计算当前盲区长度与已知的初始盲区长度的距离差值。
7、于一实施例中,在计算当前盲区长度与已知的初始盲区长度的距离差值之前,方法还包括:将安装倾斜角度输入预设的盲区长度计算模型中,获得已知的初始盲区长度。
8、于一实施例中,在基于预设的盲区长度计算模型与位姿倾斜角度,计算当前盲区长度之前,盲区长度计算模型通过下述方法得到:获取多组测试数据,测试数据包括摄像头的安装高度、清洁机器人的位姿倾斜角度与对应的盲区长度;基于多组测试数据拟合安装高度、位姿倾斜角度与对应的盲区长度的数值关系曲线,并建立盲区长度计算模型。
9、于一实施例中,在基于目标图像数据与预设的虚拟网格数据,确定目标物体在虚拟网格中的目标像素坐标之前,方法还包括:基于摄像头的安装高度、预设的垂直视场角与检测的盲区长度,计算摄像头的安装倾斜角度;基于虚拟网格中各交点的像素坐标与各交点对应的检测距离,确定在安装倾斜角度下虚拟网格中所有像素点对应的检测距离,并存储为距离矩阵表。
10、于一实施例中,基于虚拟网格中各交点的像素坐标与各交点对应的检测距离,确定在安装倾斜角度下虚拟网格中所有像素点对应的检测距离,包括:基于虚拟网格中每个像素点与其相邻交点的像素坐标,计算像素点与相邻交点的实际相对距离;基于相邻交点对应的检测距离与实际相对距离,计算虚拟网格中所有像素点分别对应的检测距离。
11、于一实施例中,在基于目标图像数据与预设的虚拟网格数据,确定目标物体在虚拟网格中的目标像素坐标之前,方法还包括:基于预设的单位角度值调整摄像头的安装倾斜角度;在清洁机器人的位姿倾斜角度为0时,确定摄像头在不同的安装倾斜角度下,虚拟网格中的所有像素点分别对应的检测距离。
12、本申请第二方面提供了一种清洁机器人,该清洁机器人包括陀螺仪、至少一个摄像头以及处理器。其中,陀螺仪用于检测清洁机器人的位姿倾斜角度;摄像头用于采集目标图像;处理器与陀螺仪、摄像头连接,处理器被配置为执行本申请第一方面任一实施例所提供的基于虚拟网格的测距方法。
13、本申请与现有技术相比的有益效果是:
14、本申请能够解决现有技术中清洁机器人因测距不准造成的避障性能差的问题。本申请通过陀螺仪与摄像头获取清洁机器人的当前位姿状态以及清洁机器人前方图像的相关数据,并结合预先设置的距离矩阵表与盲区长度计算模型输出待校准偏差值、进而校准了清洁机器人的检测距离。本申请在有效提高清洁机器人距离检测准确度的同时、有效降低了制造成本。此外,清洁机器人的避障性能提升、其工作更加安全高效,有利于提升机器人使用寿命与用户的使用体验。
技术特征:
1.一种基于虚拟网格的测距方法,其特征在于,所述方法包括:
2.根据权利要求1所述的基于虚拟网格的测距方法,其特征在于,所述基于所述距离差值、所述目标像素坐标与预设的距离矩阵表,确定所述目标物体与所述清洁机器人之间的实际检测距离,包括:
3.根据权利要求1所述的基于虚拟网格的测距方法,其特征在于,所述基于所述距离差值、所述目标像素坐标与预设的距离矩阵表,确定所述目标物体与所述清洁机器人之间的实际检测距离,包括:
4.根据权利要求1所述的基于虚拟网格的测距方法,其特征在于,所述基于预设的盲区长度计算模型与所述位姿倾斜角度,计算当前盲区长度,并获得所述当前盲区长度与已知的初始盲区长度的距离差值,包括:
5.根据权利要求4所述的基于虚拟网格的测距方法,其特征在于,在所述计算当前盲区长度与所述已知的初始盲区长度的距离差值之前,所述方法还包括:
6.根据权利要求1所述的基于虚拟网格的测距方法,其特征在于,在所述基于预设的盲区长度计算模型与所述位姿倾斜角度,计算当前盲区长度之前,所述盲区长度计算模型通过下述方法得到:
7.根据权利要求1所述的基于虚拟网格的测距方法,其特征在于,在基于所述目标图像数据与预设的虚拟网格数据,确定所述目标物体在虚拟网格中的目标像素坐标之前,所述方法还包括:
8.根据权利要求7所述的基于虚拟网格的测距方法,其特征在于,所述基于虚拟网格中各交点的像素坐标与各交点对应的检测距离,确定在所述安装倾斜角度下所述虚拟网格中所有像素点对应的检测距离,包括:
9.根据权利要求1所述的基于虚拟网格的测距方法,其特征在于,在基于所述目标图像数据与预设的虚拟网格数据,确定所述目标物体在虚拟网格中的目标像素坐标之前,所述方法还包括:
10.一种清洁机器人,其特征在于,所述清洁机器人包括:
技术总结
本申请公开了一种基于虚拟网格的测距方法与清洁机器人,涉及智能家电的技术领域。其中,基于虚拟网格的测距方法包括:获取清洁机器人在当前位姿状态下的位姿倾斜角度与针对目标物体采集的目标图像数据;基于预设的盲区长度计算模型与位姿倾斜角度,计算当前盲区长度,并获得当前盲区长度与已知的初始盲区长度的距离差值;基于目标图像数据与预设的虚拟网格数据,确定目标物体在虚拟网格中的目标像素坐标;基于距离差值、目标像素坐标与预设的距离矩阵表,确定目标物体与清洁机器人之间的实际检测距离。故本申请具有检测准确、节约成本、适应性强的优点。
技术研发人员:朱泽春,李宏峰
受保护的技术使用者:尚科宁家(中国)科技有限公司
技术研发日:
技术公布日:2024/3/4
- 还没有人留言评论。精彩留言会获得点赞!