用于车辆的目标检测系统和方法与流程
本公开涉及一种用于车辆的目标检测系统和一种用于车辆的目标检测方法,尤其涉及一种用于车辆的目标检测系统和一种用于车辆的目标检测方法,其中所述系统和所述方法能够改善由于在车辆横向方向上的速度误差而发生的错误警告情况。
背景技术:
1、用于检测目标的车辆系统是指检测接近用户车辆盲点的目标并提供目标接近的预先通知的系统。作为目标检测系统的检测单元,可以使用应用反射波的雷达传感器等。
2、用于车辆的雷达的操作原理在于从用户的车辆发射传输电磁波信号,接收从不同的车辆或障碍物反射的电磁波信号,并使用这两个信号之间的时间差和多普勒频率的变化量来估计雷达与不同的车辆或障碍物之间的距离或相对速度。
3、然而,可能发生由于障碍物的类型、移动方向等导致的错误检测而生成错误警告的问题。
4、例如,当人行走时,由于他/她的头、肩、上身、臂和腿的运动而发生各种微多普勒(micro-doppler)效应。即,微多普勒效应是指除了人的平台之外,由人的不同部位中的其他振动和旋转生成的附加的多普勒频移。当对目标类型进行分类时,使用微多普勒效应。然而,微多普勒效应在估计目标的运动信息时引起误差。其原因在于,从一个目标获取多条检测信息会导致距离、速度等的精度的差异,这取决于使用多条检测信息中的哪一条作为代表信息。此外,因为被识别为人的目标具有比车辆更小的雷达截面(radar cross section,rcs),所以在被目标反射后接收到的信号具有小的幅度。因此,可能进一步增加信息错误。
5、因此,在人从车辆的侧面沿纵向方向离开的情况下,由于车辆和人之间横向方向上的距离短,所以在一些情况下,生成错误的警告。更具体地,在人从停在用户车辆附近的车辆上下车并在纵向方向上远离用户车辆移动的情况下,由于车辆和人之间横向方向上的距离短以及人在移动时发生的微多普勒效应,可能发生横向方向上的速度误差。在这种情况下,由于横向方向上的速度误差而满足生成错误报警的条件,因此出现报警系统生成错误报警的问题。
6、因此,越来越需要技术发展来提供用于改善由于当目标在纵向方向上移动时在横向方向上的速度变化而发生的错误警告情况的方法。
7、前述内容仅旨在帮助理解本公开的背景,因此不应被解释为承认本公开落入本领域普通技术人员已知的相关技术的范围内。
技术实现思路
1、为了解决上述问题而提出的本公开的目的是提供一种用于车辆的目标检测系统和用于车辆的目标检测方法,两者都能够计算最终危险水平,不仅考虑重新计算碰撞时间(time-to-collision)和碰撞点的结果,而且还考虑由相机传感器300检测到的目标的存在或不存在。考虑当目标在横向方向上移动时发生的横向方向上的速度变化,重新计算碰撞时间和碰撞点。
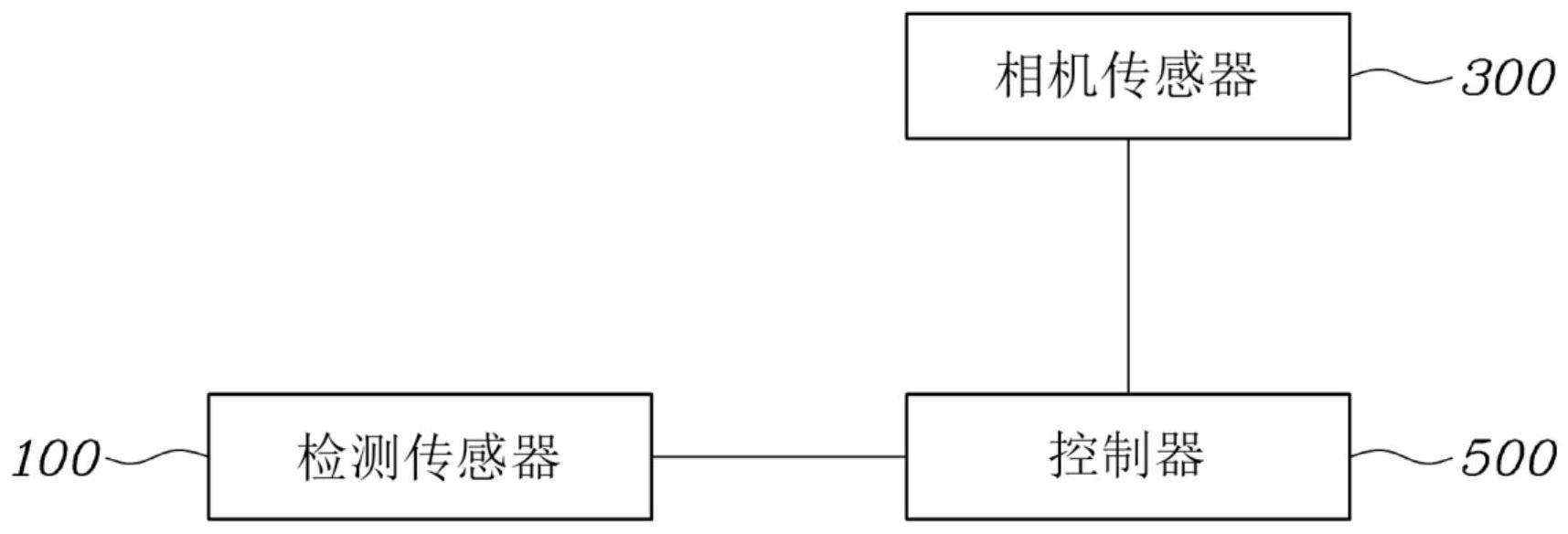
2、为了实现上述目的,根据本公开的一个方面,提供了一种用于车辆的目标检测系统,所述系统包括:基于反射波检测目标的检测传感器;基于图像监测所述目标的相机传感器;以及控制器,其基于通过所述检测传感器获取的数据和所述目标在横向方向上的速度变化来确定所述目标的第一危险水平,基于通过所述相机传感器获取的数据来确定所述目标的第二危险水平,并基于所述第一危险水平和所述第二危险水平来计算最终危险水平。
3、在所述系统中,在所述目标存在于横向方向上的阈值距离内的情况下,所述控制器可以基于所述目标的横向方向上的速度变化来确定所述第一危险水平。
4、在所述系统中,所述控制器可以计算碰撞时间和碰撞点作为用于确定所述第一危险水平的因素,并且在发生所述横向方向上的速度变化的情况下,所述控制器可以通过将所述横向方向上的速度变化与碰撞时间和碰撞点相加来重新计算所述碰撞时间和所述碰撞点。
5、在所述系统中,所述控制器将第一危险水平确定为指示“危险”或“安全”,并且在重新计算的碰撞时间短于阈值并且重新计算的撞击点落在阈值范围内的情况下,所述控制器可以将所述第一危险水平确定为指示“危险”。
6、在所述系统中,所述控制器可以将第二危险水平确定为指示“危险”或“安全”,并且可以提取由所述相机传感器通过监测获取的图像的左侧和右侧作为警告区域,并且在所述目标存在于所述警告区域上的情况下,所述控制器可以将所述第二危险水平确定为指示“危险”。在所述系统中,所述控制器可以计算所述警告区域的图像变化的值,并且当所述图像变化的值等于或高于阈值时,所述控制器可以将所述第二危险水平确定为指示“危险”。
7、在所述系统中,所述控制器可以将第一危险水平和第二危险水平确定为指示“危险”或“安全”,在所述第一危险水平和所述第二危险水平都指示危险的情况下,所述控制器可以将所述最终危险水平确定为指示“危险”,并且在所述第一危险水平和所述第二危险水平都指示“安全”的情况下,所述控制器可以将所述最终危险水平确定为指示“安全”。
8、在所述系统中,在第一危险水平和第二危险水平中只有一个指示“危险”的情况下,所述控制器可以将所述最终危险水平确定为“待定”,并且在所述最终危险水平指示“待定”的情况下,所述控制器可以延迟警告的生成,并且当所述警告的生成被延迟预定时间或更长时,可以生成警告。
9、根据本公开的另一个方面,提供了一种用于车辆的目标检测方法,该方法包括:通过检测传感器基于反射波检测目标;通过控制器考虑到由所述检测传感器获取的数据和所述目标在横向方向上的速度变化来确定所述目标的第一危险水平;通过所述控制器基于通过相机传感器获取的数据来确定所述目标的第二危险水平;以及通过所述控制器基于第一危险水平和第二危险水平来计算所述目标的最终危险水平。
10、根据本公开,即使当检测到的目标在纵向方向上移动时,由于在横向方向上的速度变化导致在计算危险水平中可能发生错误的情况下,不仅考虑重新计算碰撞时间和撞击点的结果,而且考虑通过相机传感器检测到的目标的存在或不存在,可以计算更精确的最终危险水平。考虑在横向方向上的速度变化来重新计算碰撞时间和撞击点。
技术特征:
1.一种用于车辆的目标检测系统,所述系统包括:
2.根据权利要求1所述的系统,其中,在所述目标存在于所述横向方向上的阈值距离内的情况下,所述控制器基于所述目标在所述横向方向上的速度变化来确定所述第一危险水平。
3.根据权利要求1所述的系统,其中,所述控制器计算碰撞时间和碰撞点作为用于确定所述第一危险水平的因素,和
4.根据权利要求3所述的系统,其中,所述控制器将所述第一危险水平确定为指示危险或安全,和
5.根据权利要求1所述的系统,其中,所述控制器将所述第二危险水平确定为指示危险或安全,并且提取由所述相机传感器通过监测获取的图像的左侧和右侧作为警告区域,和
6.根据权利要求5所述的系统,其中,所述控制器计算所述警告区域的图像变化的值,和
7.根据权利要求1所述的系统,其中,所述控制器将所述第一危险水平和所述第二危险水平确定为指示危险或安全,
8.根据权利要求7所述的系统,其中,在所述第一危险水平和所述第二危险水平中仅有一个指示危险的情况下,所述控制器将所述最终危险水平确定为待定,和
9.一种用于车辆的目标检测方法,所述方法包括:
10.根据权利要求9所述的方法,其中,在确定所述第一危险水平时,在所述目标在横向方向上在阈值距离内移动的情况下,基于所述目标的横向方向上的速度变化来确定所述第一危险水平。
11.根据权利要求9所述的方法,其中,在确定所述第一危险水平时,计算碰撞时间和碰撞点作为用于确定所述第一危险水平的因素,和
12.根据权利要求11所述的方法,其中,在确定所述第一危险水平时,所述第一危险水平被确定为指示危险或安全,和
13.根据权利要求9所述的方法,其中,在确定所述第二危险水平时,所述第二危险水平被确定为指示危险或安全,并且提取由所述相机传感器通过监测获取的图像的左侧和右侧作为警告区域,并且计算所述警告区域的图像变化的值,和
14.根据权利要求9所述的方法,其中,在计算所述最终危险水平时,所述第一危险水平和所述第二危险水平被确定为指示危险或安全,
15.根据权利要求14所述的方法,其中,在计算所述最终危险水平时,在所述第一危险水平和所述第二危险水平中仅有一个指示危险的情况下,将所述最终危险水平确定为待定,和
技术总结
在人从车辆附近在纵向方向上离开的情况下,由于横向方向上的速度变化而满足了生成警告的条件。因此,警告系统生成错误的警告。为了解决这个问题,提出了一种用于车辆的目标检测系统和一种用于车辆的目标检测方法,均能够计算最终危险水平,其不仅考虑重新计算碰撞时间和碰撞点的结果,而且考虑由相机传感器检测的目标的存在或不存在。考虑当目标在纵向方向上移动时横向方向上的速度变化来重新计算碰撞时间和碰撞点。
技术研发人员:姜恩奭
受保护的技术使用者:现代摩比斯株式会社
技术研发日:
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!