平面平台上的光机械陀螺仪的制作方法
本发明涉及一种陀螺仪的传感组件和一种陀螺仪,例如包含该传感组件的光学-微机械陀螺仪。
背景技术:
1、陀螺仪是安装在其他设备上的一种装置,用于测量该设备的角速度或方向。陀螺仪可用于各种系统,如摄影机稳定器、陀螺罗盘、方向指示器、导航系统和惯性测量单元。根据工作机制和技术规格的不同,陀螺仪可以划分成不同种类,如机械陀螺仪、光学陀螺仪和微机械陀螺仪。其中,光学陀螺仪包括环形激光陀螺仪(rlg)和光纤陀螺仪(fog),具有很高的性能,但其尺寸仍然比较大。除了精度和性能,目前对现代导航系统中的陀螺仪的要求还包括小尺寸、低成本和高功率。当陀螺仪较小时,导航设备能够与迷你化的自导系统兼容,比如无人机,而这种兼容曾被认为是无法实现的。由于其尚可的性能和市场对其的巨大需求,微机械陀螺在过去的几十年里迅速发展。
2、与传统的机械陀螺仪和光学陀螺仪相比,微机械陀螺仪在规模和成本方面有其独特的优势。一般来说,微机械陀螺仪可以同时满足消费者市场和工业市场的要求,其具有高可靠性,也针对不同的品级具有相应的高性能。在消费者市场,微机械陀螺仪已经装备在许多机器上,如汽车、智能手机和物联网(iot)设备。在工业市场,大多数具有反馈控制的系统都嵌入了微机械陀螺仪,如机械臂和自动输送机。
3、微机械陀螺仪使用振动元件测量角速度。所有微机械陀螺仪的机制都是基于科里奥利效应以完成其振动驱动模式和感应模式之间的能量传递。
4、微机械陀螺仪在市场上取得了巨大的成功,但是它们在性能方面仍面临一些挑战。物联网设备和虚拟空间的高速互动需要高分辨率。而对微机械陀螺仪来说,位移或力的读出是决定其分辨率的重要因素。其主要运行机制为:微机械陀螺仪包含框架以及灵活安装于框架上的质量块,在框架旋转时,微机械陀螺仪通过其感应模式探测质量块受到的科里奥利力。传统的微机械陀螺仪中,位移或力的读出主要基于电容、压电、隧道效应和光学读出方法。基于压电效应的微机械陀螺仪通常拥有较大的动态测量范围,但较难将这类陀螺仪集成到芯片上。此外,基于隧道效应的微机械陀螺仪存在着动态范围窄和制造技术要求高的缺点,其技术要求包括在原子尺度上精确控制小针尖与表面的距离。基于电容法的微机械陀螺仪由于其易于制造、性质稳定和反馈控制简单而被广泛研究开发。然而,电容式微机械陀螺仪又存在寄生电容、卷曲效应和窄带宽等缺点。此外,基于电子的陀螺仪对电磁干扰敏感,从而限制了它们在复杂环境中的应用。
5、相比之下,光学陀螺仪具有卓越的位移分辨率,抗电磁干扰,也有较高的热稳定性。这些优势有利于开发具有高灵敏度、宽带宽和良好可靠性的光学陀螺仪。然而,传统的光学陀螺仪,如rlg和fog,无法用于芯片级的集成。
6、业界正努力改善微机械陀螺仪的光学读出。然而至今该方向的研究成果仅为简单的法布里-珀罗腔或干涉仪,其光学品质因子小,导致其灵敏度较低;因此,需要一个大的质量块作为对低灵敏度的补偿;而大的质量块会导致较低的谐振频率;继而,由于谐振频率低,带宽也受到限制。此外,之前的设计通常需要额外的光纤或自由空间激光器,这阻碍了芯片集成和封装。因此,之前的设计的成本相对较高。
7、因此,需要一种陀螺仪的传感组件和陀螺仪,例如,包括该传感组件的光学-微机械陀螺仪,该传感组件寻求解决或缓解上述问题中的至少一个。
8、申请内容
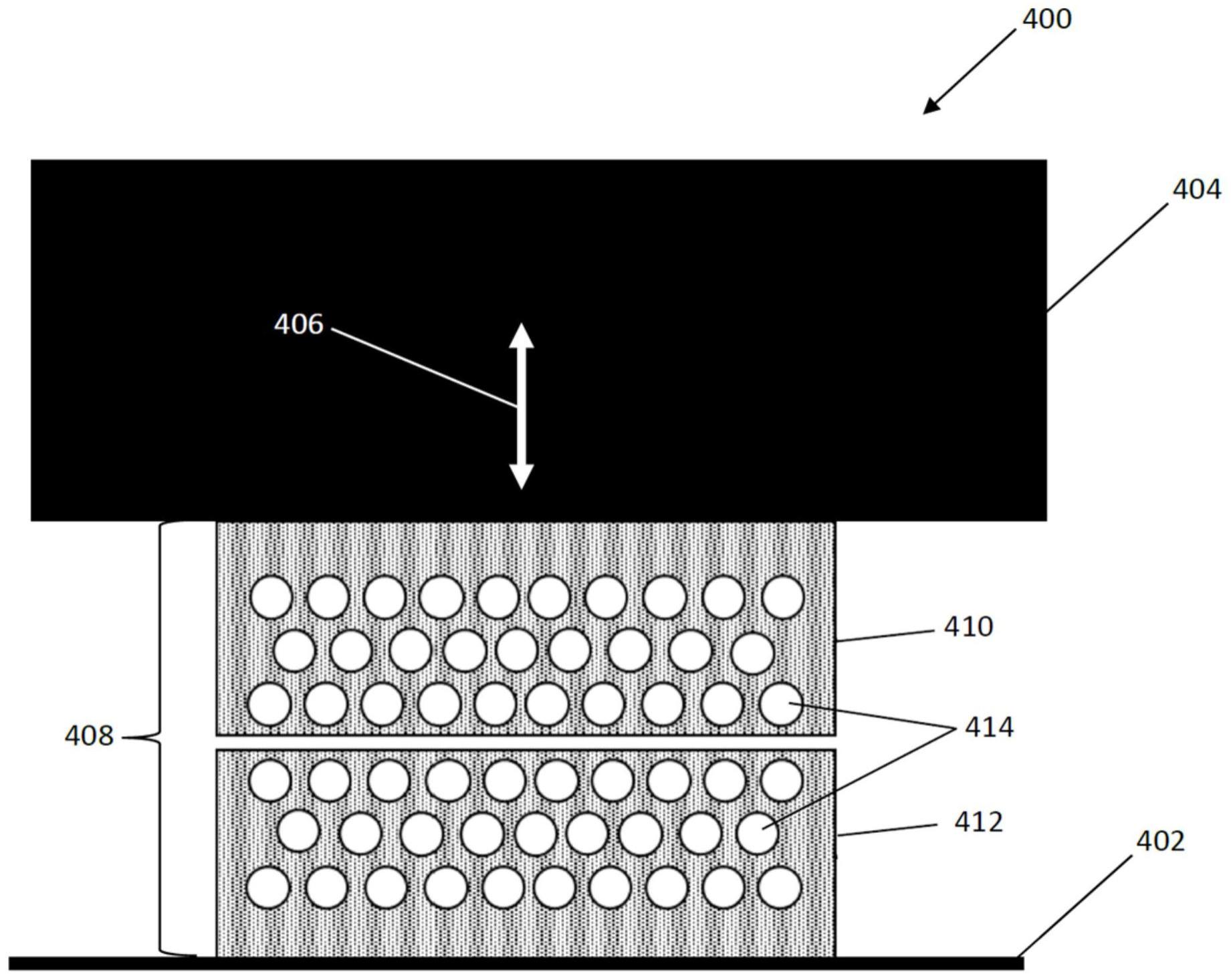
9、本申请提供了一种陀螺仪的传感组件,该传感组件包括:框架;质量块,可响应于施加在传感组件上的科里奥利力而相对于框架移动;光子晶体腔,包括耦合到质量块的第一光子晶体以及与耦合到框架的第二光子晶体;其中,第一光子晶体和第二光子晶体各自包括在其上形成的孔阵列;其中,光子晶体腔可响应于科里奥利力而产生光学输出,其中,传感组件可基于光学输出测量科里奥利力。
10、光子晶体腔可以进一步包括处于第一光子晶体和第二光子晶体之间的间隙;所述间隙的间隙大小定义为第一光子晶体和第二光子晶体的两个相对表面之间的距离;光子晶体腔的光学输出通过间隙大小的变化进行调制。
11、第一光子晶体可与质量块同步移动;并且间隙大小可响应于第一光子晶体的移动而改变。
12、间隙大小的变化可导致光子晶体腔的边界条件和光学约束参数改变,继而导致光子晶体腔的光学输出被改变。
13、光子晶体腔可以进一步包括耦合到第一光子晶体和第二光子晶体的第三光子晶体;第三光子晶体位于第一光子晶体和第二光子晶体之间的光子晶体腔的中心位置;第三光子晶体可响应于由第一光子晶体施加的张量而变形。
14、第三光子晶体的变形可导致第三光子晶体的一个或多个光学特性被改变,继而导致光子晶体腔的光学输出被改变。
15、优选地,第三光子晶体的尺寸小于第一光子晶体和第二光子晶体的尺寸。
16、第二光子晶体的一个或多个光学特性可以包括介电常数。
17、光学输出可以包括光子晶体腔的光学谐振频率。
18、第一光子晶体和第二光子晶体可以相对于彼此对称地排列。
19、第一光子晶体和第二光子晶体中的孔阵列可以是周期性排列的孔。
20、第三光子晶体可包括具有周期性排列的孔阵列。
21、第一光子晶体可与质量块同步移动;并且第二光子晶体可相对于框架静止。
22、质量块、第一光子晶体和第二光子晶体可以由氮化硅制成。
23、质量块、第一光子晶体和第二光子晶体可以由硅制成。
24、本申请还提供了一种光学-微机械陀螺仪,包括用于探测陀螺仪的感应模式的传感组件,该传感组件包括:框架;质量块,可响应于施加在传感组件上的科里奥利力而相对于框架移动;光子晶体腔,包括耦合到质量块的第一光子晶体以及与耦合到框架的第二光子晶体;其中,第一光子晶体和第二光子晶体各自包括在其上形成的孔阵列;其中,光子晶体腔可响应科里奥利力而产生光学输出,其中,传感组件可基于光学输出测量科里奥利力。
25、光子晶体腔可以进一步包括处于第一光子晶体和第二光子晶体之间的间隙;所述间隙的间隙大小定义为第一光子晶体和第二光子晶体的两个相对表面之间的距离;光子晶体腔的光学输出通过间隙大小的变化进行调制。
26、光子晶体腔可以进一步包括耦合到第一光子晶体和第二光子晶体的第三光子晶体;第三光子晶体位于第一光子晶体和第二光子晶体之间的光子晶体腔的中心位置;第三光子晶体可响应于由第一光子晶体施加的张量而变形。
27、光学-微机械陀螺仪可以进一步包括:芯片;驱动框架;用于悬挂驱动框架的多个纳米系链;用于探测陀螺仪的驱动模式的驱动传感器;用于校准驱动框架的运动的校准传感器;以及,用于为驱动模式提供静电脉冲的驱动电容器。
28、光学-微机械陀螺仪可以基于由传感组件测量的科里奥利力来测量角速度。
技术实现思路
技术特征:
1.一种陀螺仪的传感组件,其特征在于,所述传感组件包括:
2.根据权利要求1所述的传感组件,其特征在于,
3.根据权利要求2所述的传感组件,其特征在于,
4.根据权利要求2或3所述的传感组件,其特征在于,
5.根据权利要求1所述的传感组件,其特征在于,
6.根据权利要求5所述的传感组件,其特征在于,
7.根据权利要求5所述的传感组件,其特征在于,所述第三光子晶体的尺寸小于所述第一光子晶体和所述第二光子晶体的尺寸。
8.根据权利要求6或7所述的传感组件,其特征在于,所述第二光子晶体的一个或多个光学特性包括介电常数。
9.根据权利要求1所述的传感组件,其特征在于,所述光学输出包括所述光子晶体腔的光学谐振频率。
10.根据权利要求1所述的传感组件,其特征在于,所述第一光子晶体和所述第二光子晶体相对于彼此对称地排列。
11.根据权利要求1所述的传感组件,其中所述第一光子晶体和所述第二光子晶体的孔阵列为的周期性排列的孔。
12.根据权利要求5所述的传感组件,其特征在于,所述第三光子晶体包括周期性排列的孔阵列。
13.根据权利要求1所述的传感组件,其特征在于,
14.根据权利要求1所述的传感组件,其特征在于,所述质量块、所述第一光子晶体和所述第二光子晶体由氮化硅制成。
15.根据权利要求1所述的传感组件,其特征在于,所述质量块、所述第一光子晶体和所述第二光子晶体由硅制成的。
16.一种光学-微机械陀螺仪,其特征在于,
17.根据权利要求16所述的光学-微机械陀螺仪,其特征在于,
18.根据权利要求16所述的光学-微机械陀螺仪,其特征在于,
19.根据权利要求16至18中任一项所述的光学-微机械陀螺仪,其特征在于,所述光学-微机械陀螺仪还包括:
20.根据权利要求16所述的光学-微机械陀螺仪,其特征在于,所述光-微机械陀螺仪基于由所述传感组件测量的所述科里奥利力来测量角速度。
技术总结
本发明提供了一种陀螺仪的传感组件和一个包括该传感组件的光‑微机械陀螺仪,该传感组件包括:框架;质量块,可响应于施加在传感组件上的科里奥利力而相对于框架移动;光子晶体腔,包括耦合到质量块的第一光子晶体以及与耦合到框架的第二光子晶体;其中,第一光子晶体和第二光子晶体各自有在其上形成的孔阵列;其中,光子晶体腔可响应科里奥利力而产生光学输出,其中,传感组件可基于光学输出的变化测量科里奥利力。
技术研发人员:张洪波,任恒江,罗杰
受保护的技术使用者:意子科技私人投资有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!