机器人部署的方法、存储介质、机器人及机器人部署系统与流程
本公开涉及机器人,具体涉及一种机器人部署的方法、存储介质、机器人及机器人部署系统。
背景技术:
1、现有技术在场所空间内部署机器人时,需要大量运维人员在现场配合着机器人完成地图构建操作和清洁任务规划操作,机器人部署效率比较低,并且也会需要投入较高机器人部署成本,限制了机器人的大规模推广和使用。
2、公开内容
3、本公开实施例的一个目的旨在提供一种机器人部署的方法、存储介质、机器人及机器人部署系统,旨在改善现有机器人部署效率较低的问题。
4、在第一方面,本公开实施例提供一种机器人部署的方法,包括:
5、响应启动命令,启动机器人部署程序,所述机器人部署程序被配置为:根据设定的部署流程及部署执行状态,生成对应的部署提示,及根据用户的反馈执行部署作业,所述部署提示包括:部署标识物提示及撤除标识物提示,所述部署作业包括:地图构建、清洁任务生成及用户修改确定;
6、所述地图构建部署作业包括执行以下步骤:
7、响应模式选择命令,确定目标构图模式;
8、根据所述目标构图模式,控制所述机器人执行地图构建操作,以得到清洁地图;
9、所述清洁任务生成部署作业包括执行以下步骤:
10、对所述清洁地图进行分区,以获得至少一清洁作业分区;
11、对各所述清洁作业分区进行作业任务规划;
12、对特定物体和/或特定区域进行标注。
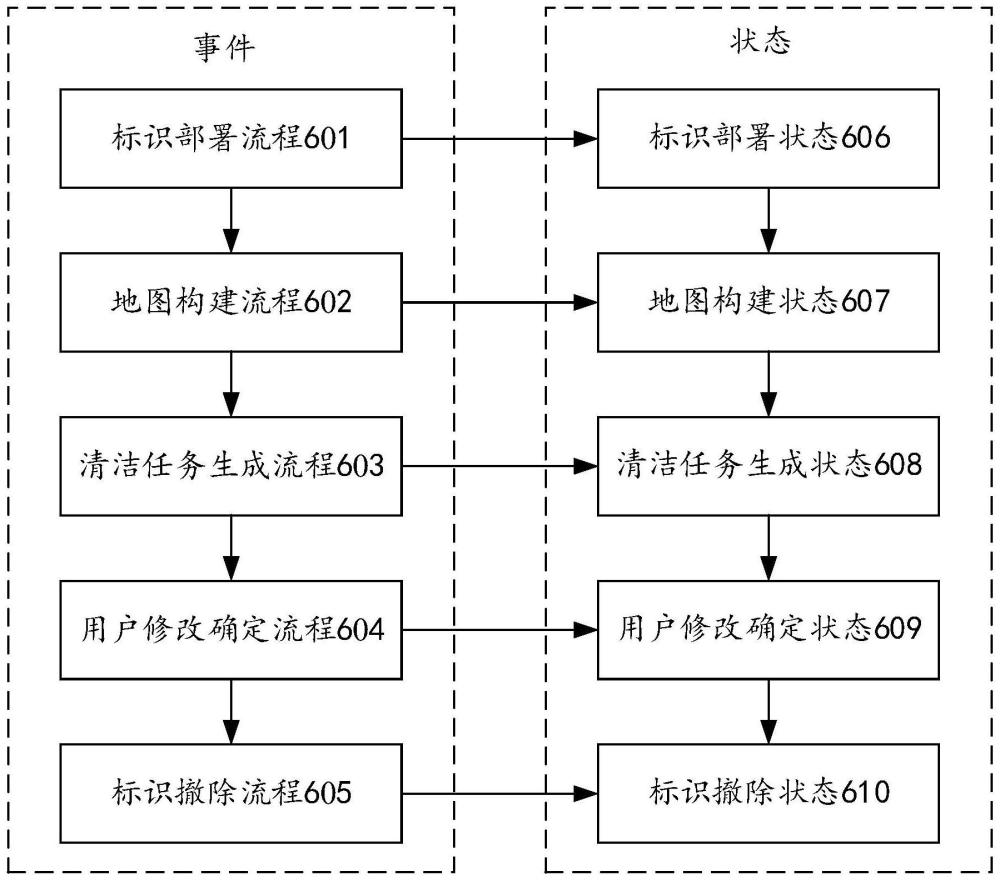
13、可选地,所述部署流程包括在目标空间内部署标识物的标识部署流程,所述根据设定的部署流程及部署执行状态,生成对应的部署提示包括:
14、响应启动命令,调用与所述标识部署流程对应的应用程序接口,以控制所述机器人进入标识部署状态;
15、在所述标识部署状态下控制所述机器人生成部署标识物提示,所述标识部署提示用于提示用户在所述目标空间内部署标识物。
16、可选地,所述部署流程包括地图构建流程,所述根据设定的部署流程及部署执行状态,生成对应的部署提示包括:
17、响应标识部署结束命令,调用与所述地图构建流程对应的应用程序接口,以控制所述机器人进入地图构建状态;
18、在所述地图构建状态下控制所述机器人生成构图模式选择页面,其中,所述构图模式选择页面包括多个构图模式。
19、可选地,所述部署流程包括需要用户对待确定的清洁地图进行修改确定的用户修改确定流程,所述根据用户的反馈执行部署作业包括:
20、结束所述清洁任务生成部署作业后,调用与所述用户修改确定流程对应的应用程序接口,以控制所述机器人进入用户修改确定状态;
21、在所述用户修改确定状态下向用户终端发送所述待确定的清洁地图,以使所述用户终端返回已确定的清洁地图;
22、保存所述已确定的清洁地图。
23、可选地,所述部署流程包括在目标空间内撤除已部署的标识物的标识撤除流程,所述根据设定的部署流程及部署执行状态,生成对应的部署提示包括:
24、当检测到地图构建结束命令时,调用与所述标识撤除流程对应的应用程序接口,以控制所述机器人进入标识撤除状态;
25、在所述标识撤除状态下控制所述机器人生成撤除标识物提示,所述标识撤除提示用于提示用户撤除在目标空间内已部署的标识物。
26、可选地,所述根据所述目标构图模式,控制所述机器人执行地图构建操作包括:
27、根据所述目标构图模式,控制所述机器人探索待探索区域以构建清洁地图;
28、当检测到所述待探索区域的标识物时,记录所述标识物的位置;
29、根据所述标识物的位置,生成所述清洁地图的边界。
30、可选地,根据所述目标构图模式,控制所述机器人探索待探索区域以构建清洁地图包括:
31、若所述目标构图模式为跟随构图模式,则控制所述机器人在所述跟随构图模式下探索待探索区域以构建清洁地图;
32、若所述目标构图模式为自动构图模式,则控制所述机器人在所述自动构图模式下探索待探索区域以构建清洁地图;
33、若所述目标构图模式为遥控构图模式,则控制所述机器人在所述遥控构图模式下探索待探索区域以构建清洁地图。
34、可选地,所述地图构建部署作业由所述机器人执行处理;
35、所述清洁任务生成部署作业由一远程服务器执行处理:所述远程服务器获取所述机器人发送的清洁地图,根据所述清洁地图执行所述清洁任务生成部署作业,得到待确定的清洁地图,并将所述待确定的清洁地图发送给所述机器人。
36、在第二方面,本公开实施例提供一种存储介质,存储有计算机可执行指令,所述计算机可执行指令用于使机器人执行上述的机器人部署的方法。
37、在第三方面,本公开实施例提供一种机器人,包括:
38、至少一个处理器;以及,
39、与所述至少一个处理器通信连接的存储器;其中,
40、所述存储器存储有可被所述至少一个处理器执行的指令,所述指令被所述至少一个处理器执行,以使所述至少一个处理器能够执行上述的机器人部署的方法。
41、在第四方面,本公开实施例提供一种机器人部署系统,包括:
42、上述的机器人;及
43、远程服务器,所述远程服务器与所述机器人通信连接。
44、在本公开实施例提供的机器人部署的方法中,响应用户输入的启动操作,启动机器人部署程序,机器人部署程序被配置为:根据设定的部署流程及部署执行状态,生成对应的部署提示,及根据用户的反馈执行部署作业。部署提示包括:部署标识物及撤除标识物,部署作业包括:地图构建、清洁任务生成及用户修改确定。其中,地图构建部署作业包括执行以下步骤:响应用户输入的模式选择操作,确定目标构图模式,根据目标构图模式,控制机器人执行地图构建操作,以得到清洁地图。其中,清洁任务生成部署作业包括执行以下步骤:对清洁地图进行分区,以获得至少一清洁作业分区,对各清洁作业分区进行作业任务规划,对指定类型物体和/或指定类型区域进行标注。本实施例提供的机器人能够按照部署流程和用户的反馈,自动生成部署提示或者自动执行部署作业,提高了机器人部署效率,简化了机器人部署工作,有利于节省成本。
技术实现思路
技术特征:
1.一种机器人部署的方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,所述部署流程包括在目标空间内部署标识物的标识部署流程,所述根据设定的部署流程及部署执行状态,生成对应的部署提示包括:
3.根据权利要求1所述的方法,其特征在于,所述部署流程包括地图构建流程,所述根据设定的部署流程及部署执行状态,生成对应的部署提示包括:
4.根据权利要求1所述的方法,其特征在于,所述部署流程包括需要用户对待确定的清洁地图进行修改确定的用户修改确定流程,所述根据用户的反馈执行部署作业包括:
5.根据权利要求1所述的方法,其特征在于,所述部署流程包括在目标空间内撤除已部署的标识物的标识撤除流程,所述根据设定的部署流程及部署执行状态,生成对应的部署提示包括:
6.根据权利要求1所述的方法,其特征在于,所述根据所述目标构图模式,控制所述机器人执行地图构建操作包括:
7.根据权利要求6所述的方法,其特征在于,根据所述目标构图模式,控制所述机器人探索待探索区域以构建清洁地图包括:
8.根据权利要求1所述的方法,其特征在于,
9.一种存储介质,其特征在于,存储有计算机可执行指令,所述计算机可执行指令用于使机器人执行如权利要求1至7任一项所述的机器人部署的方法。
10.一种机器人,其特征在于,包括:
11.一种机器人部署系统,其特征在于,包括:
技术总结
本公开涉及机器人技术领域,公开了一种机器人部署的方法、存储介质、机器人及机器人部署系统。机器人部署的方法包括:响应启动命令,启动机器人部署程序,机器人部署程序被配置为:根据设定的部署流程及部署执行状态,生成对应的部署提示,及根据用户的反馈执行部署作业,部署提示包括:部署标识物提示及撤除标识物提示,所述部署作业包括:地图构建、清洁任务生成及用户修改确定。本实施例提供的机器人能够按照部署流程和用户的反馈,自动生成部署提示或者自动执行部署作业,提高了机器人部署效率,简化了机器人部署工作,有利于节省成本。
技术研发人员:阳方平,任亮亮,李文涛,武康康
受保护的技术使用者:广州视源电子科技股份有限公司
技术研发日:
技术公布日:2024/3/12
- 还没有人留言评论。精彩留言会获得点赞!