基于星间激光测距的精确定位方法与流程
1.本发明涉及遥感对地观测技术领域,尤其涉及基于星间激光测距的精确定位方法。
背景技术:
2.卫星激光测距是利用安置在地面上的卫星激光测距系统所发射的激光脉冲,跟踪观测装有激光反射棱镜的人造地球卫星,以测定测站到卫星之间的距离的技术和方法。是卫星单点定位中精度最高的一种,可达厘米级。但是现有的卫星激光测距会受到很多影响,其中激光测距和激光光束指向会直接造成激光光斑位置产生偏移,还有会有大气、测时等因素的影响。
技术实现要素:
3.本发明的目的是为了解决现有技术中存在的缺点,而提出的基于星间激光测距的精确定位方法。
4.为了实现上述目的,本发明采用了如下技术方案:
5.基于星间激光测距的精确定位方法,包括如下步骤:
6.s01:在导航卫星上搭载星间激光测距设备和ccd相机,激光测距设备获取导航卫星之间的双向激光测距观测量,ccd相机获取ccd图像,并通过dem数据辅助下对ccd图像进行几何校正;
7.s02:地面监测站接收观测数据,与步骤s01获取的星间激光测距数据进行数据组合,根据组合数据得到初始方位元素,利用初始方位元素和ccd图像计算坐标;
8.s03:数据处理中心生成导航卫星轨道及钟差产品,同时确定每颗卫星的非整数模糊度参数,发送给用户;
9.s04:用户接收导航信号,获取相位观测坐标,并解码得到导航卫星的星间激光测距数据,以及激光测距设备与导航信号发射设备之间的时延参数信息,并对激光测距观测量参数进行预处理;
10.s05:用户利用观测得到的导航卫星相位观测量和星间精密距离,结合ccd图像和用户接收的相位中心参数,确定自身位置。
11.进一步的,s01中,获取ccd图像成像时卫星平台的瞬时姿态数据、ccd图像的像元畸变参数,获得测区的dem数据;
12.进一步的,s02中,ccd图像计算坐标:获取dem数据,获得与ccd图像相一致的区域,使用12.5米分辨率的alos palsar数据,计算这些像元的标准差,将该标准差作为该像元的地形起伏度的计算结果。
13.进一步的,s04中,预处理包括粗差剔除、相对论修正、设备时延修正,消除系统误差,并通过双向测距观测量的相加、相减组合,形成与导航信号发射时刻对应的星间精密距离和钟差信息。
14.进一步的,根据坐标计算误差,给定误差值,误差大于给定误差值,则根据结果进行迭代。
15.进一步的,激光测距设备信号收发时延参数变化小于0.3ns/24h。
16.本发明的有益效果为:
17.1、利用卫星之间星间测距观测量以及ccd相机测量参数,提高动态点位的定位效率,同时减少定位误差,可以很好地解决由于卫星激光测距误差,提高了导航卫星的测量精度,具有较强的适用性和实用价值。
附图说明
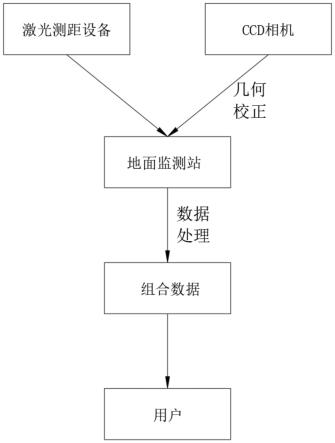
18.图1为本发明提出的基于星间激光测距的精确定位方法的流程示意图。
具体实施方式
19.为更进一步阐述本发明为实现预定发明目的所采取的技术手段及功效,以下结合附图及较佳实施例,对依据本发明的具体实施方式、结构、特征及其功效,详细说明如后。
20.参照图1,基于星间激光测距的精确定位方法,包括如下步骤:
21.s01:在导航卫星上搭载星间激光测距设备和ccd相机,激光测距设备获取导航卫星之间的双向激光测距观测量,ccd相机获取ccd图像,并通过dem数据辅助下对ccd图像进行几何校正;
22.s02:地面监测站接收观测数据,与步骤s01获取的星间激光测距数据进行数据组合,根据组合数据得到初始方位元素,利用初始方位元素和ccd图像计算坐标;
23.s03:数据处理中心生成导航卫星轨道及钟差产品,同时确定每颗卫星的非整数模糊度参数,发送给用户;
24.s04:用户接收导航信号,获取相位观测坐标,并解码得到导航卫星的星间激光测距数据,以及激光测距设备与导航信号发射设备之间的时延参数信息,并对激光测距观测量参数进行预处理;
25.s05:用户利用观测得到的导航卫星相位观测量和星间精密距离,结合ccd图像和用户接收的相位中心参数,确定自身位置。
26.s01中,获取ccd图像成像时卫星平台的瞬时姿态数据、ccd图像的像元畸变参数,获得测区的dem数据;
27.s02中,ccd图像计算坐标:获取dem数据,获得与ccd图像相一致的区域,使用12.5米分辨率的alos palsar数据,计算这些像元的标准差,将该标准差作为该像元的地形起伏度的计算结果。
28.s04中,预处理包括粗差剔除、相对论修正、设备时延修正,消除系统误差,并通过双向测距观测量的相加、相减组合,形成与导航信号发射时刻对应的星间精密距离和钟差信息。
29.根据坐标计算误差,给定误差值,误差大于给定误差值,则根据结果进行迭代。
30.激光测距设备信号收发时延参数变化小于0.3ns/24h。
31.以上所述,仅是本发明的较佳实施例而已,并非对本发明作任何形式上的限制,虽然本发明已以较佳实施例揭示如上,然而并非用以限定本发明,任何本领域技术人员,在不
脱离本发明技术方案范围内,当可利用上述揭示的技术内容做出些许更动或修饰为等同变化的等效实施例,但凡是未脱离本发明技术方案内容,依据本发明的技术实质对以上实施例所作的任何简介修改、等同变化与修饰,均仍属于本发明技术方案的范围内。
技术特征:
1.基于星间激光测距的精确定位方法,其特征在于,包括如下步骤:s01:在导航卫星上搭载星间激光测距设备和ccd相机,激光测距设备获取导航卫星之间的双向激光测距观测量,ccd相机获取ccd图像,并通过dem数据辅助下对ccd图像进行几何校正;s02:地面监测站接收观测数据,与步骤s01获取的星间激光测距数据进行数据组合,根据组合数据得到初始方位元素,利用初始方位元素和ccd图像计算坐标;s03:数据处理中心生成导航卫星轨道及钟差产品,同时确定每颗卫星的非整数模糊度参数,发送给用户;s04:用户接收导航信号,获取相位观测坐标,并解码得到导航卫星的星间激光测距数据,以及激光测距设备与导航信号发射设备之间的时延参数信息,并对激光测距观测量参数进行预处理;s05:用户利用观测得到的导航卫星相位观测量和星间精密距离,结合ccd图像和用户接收的相位中心参数,确定自身位置。2.根据权利要求1所述的基于星间激光测距的精确定位方法,其特征在于,s01中,获取ccd图像成像时卫星平台的瞬时姿态数据、ccd图像的像元畸变参数,获得测区的dem数据。3.根据权利要求2所述的基于星间激光测距的精确定位方法,其特征在于,s02中,ccd图像计算坐标:获取dem数据,获得与ccd图像相一致的区域,使用12.5米分辨率的alos palsar数据,计算这些像元的标准差,将该标准差作为该像元的地形起伏度的计算结果。4.根据权利要求3所述的基于星间激光测距的精确定位方法,其特征在于,s04中,预处理包括粗差剔除、相对论修正、设备时延修正,消除系统误差,并通过双向测距观测量的相加、相减组合,形成与导航信号发射时刻对应的星间精密距离和钟差信息。5.根据权利要求4所述的基于星间激光测距的精确定位方法,其特征在于,根据坐标计算误差,给定误差值,误差大于给定误差值,则根据结果进行迭代。6.根据权利要求5所述的基于星间激光测距的精确定位方法,其特征在于,激光测距设备信号收发时延参数变化小于0.3ns/24h。
技术总结
本发明涉及基于星间激光测距的精确定位方法,包括如下步骤:S01:在导航卫星上搭载星间激光测距设备和CCD相机,激光测距设备获取导航卫星之间的双向激光测距观测量,CCD相机获取CCD图像,并通过DEM数据辅助下对CCD图像进行几何校正;S02:地面监测站接收观测数据,与步骤S01获取的星间激光测距数据进行数据组合,根据组合数据得到初始方位元素,利用初始方位元素和CCD图像计算坐标;S03:数据处理中心生成导航卫星轨道及钟差产品。本发明利用卫星之间星间测距观测量以及CCD相机测量参数,提高动态点位的定位效率,同时减少定位误差,可以很好地解决由于卫星激光测距误差,提高了导航卫星的测量精度,具有较强的适用性和实用价值。价值。价值。
技术研发人员:ꢀ(74)专利代理机构
受保护的技术使用者:南京天际易达通信技术有限公司
技术研发日:2022.09.06
技术公布日:2022/11/22
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1