托盘定位方法、装置、设备及可读存储介质与流程
本申请涉及物流领域,尤其涉及一种托盘定位方法、装置、设备及可读存储介质。
背景技术:
1、随着物流行业的飞速发展,货物自动搬运已经成为物流行业越来越迫切的需求,托盘作为物流运作过程中重要的装卸,储存和运输设备,与叉车配套使用在现代物流中发挥着巨大的作用,通常采用视觉系统对其检测与定位。
2、目前行业内多采用双目相机或tof相机进行托盘定位和定位,其中依赖图像对托盘进行检测,利用深度数据对托盘进行定位,但双目相机和tof相机受环境光影响较大,在有强光的户外难以实现有效定位。
技术实现思路
1、有鉴于此,本申请提供一种托盘定位方法、装置、设备及可读存储介质,旨在提高托盘的定位精度。
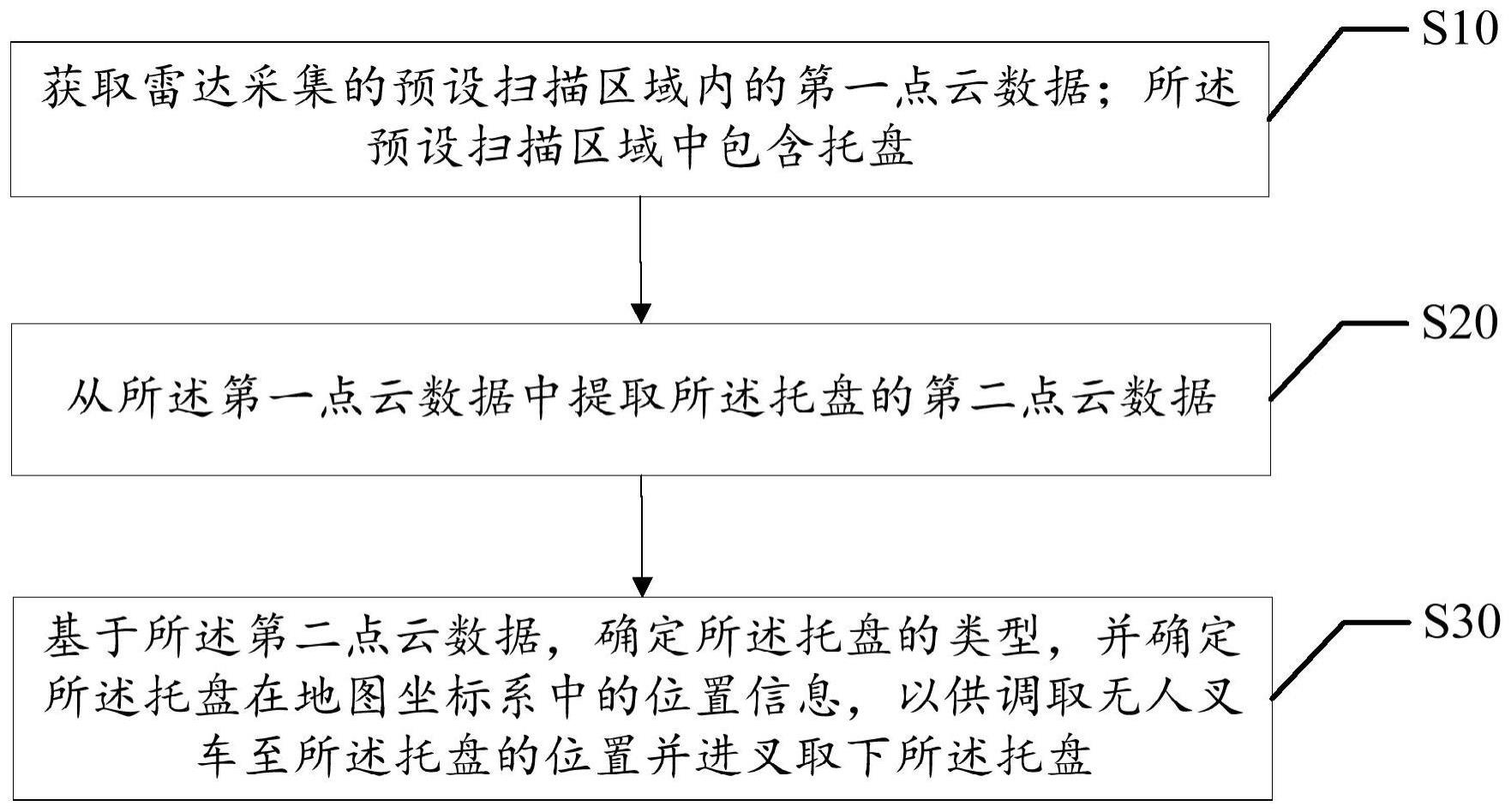
2、为实现上述目的,本申请提供一种托盘定位方法,所述方法包括:
3、获取雷达采集的预设扫描区域内的第一点云数据;所述预设扫描区域中包含托盘;
4、从所述第一点云数据中提取所述托盘的第二点云数据;
5、基于所述第二点云数据,确定所述托盘的类型,并确定所述托盘在地图坐标系中的位置信息,以供调取无人叉车至所述托盘的位置并进叉取下所述托盘。
6、示例性的,所述从所述第一点云数据中提取所述托盘的第二点云数据,包括:
7、基于所述第一点云数据,生成场景灰度图;所述场景灰度图中包含托盘图像和背景图像;
8、基于所述场景灰度图,提取所述托盘的第二点云数据。
9、示例性的,所述基于所述场景灰度图,提取所述托盘的第二点云数据,包括:
10、输入所述场景灰度图至深度检测模型,确定检测边界框中存在所述托盘图像的概率;
11、确定所述概率值最高的检测边界框为目标检测边界框;
12、提取所述目标检测边界框中的第三点云数据,并对所述第三点云数据进行筛选,确定所述第二点云数据。
13、示例性的,所述输入所述场景灰度图至深度检测模型,确定检测边界框中存在所述托盘图像的概率之前,包括:
14、获取多个角度的历史托盘图像;
15、基于所述历史托盘图像,训练预设深度检测模型;
16、当达到预设训练次数或模型收敛时,结束训练,得到深度检测模型。
17、示例性的,所述基于所述第一点云数据,生成场景灰度图之前,包括:
18、在所述雷达处设置虚拟相机点位,并在所述虚拟相机点位设置虚拟相机;
19、获取所述虚拟相机的分辨率和视场角;
20、基于所述分辨率和视场角,确定所述虚拟相机的内参。
21、示例性的,所述基于所述第一点云数据,生成场景灰度图,包括:
22、将所述第一点云数据输入针孔成像模型,确定所述点云数据中多个三维坐标在灰度图中对应的二维坐标;
23、基于每一所述三维坐标对应的点的强度值,确定所述点在所述灰度图中对应的灰度值;
24、基于所述灰度值和所述二维坐标,生成包含托盘图像的场景灰度图。
25、示例性的,所述基于所述第二点云数据,确定所述托盘在地图坐标系中的位置信息,包括:
26、基于所述第二点云数据,确定所述托盘相对于所述雷达的距离信息和角度信息;
27、基于所述距离信息和所述角度信息,确定所述托盘在地图坐标系中的位置信息。
28、示例性的,为实现上述目的,本申请还提供一种托盘定位装置,所述托盘定位装置包括:
29、获取模块,用于获取雷达采集的预设扫描区域内的第一点云数据;所述预设扫描区域中包含托盘;
30、提取模块,用于从所述第一点云数据中提取所述托盘的第二点云数据;
31、确定模块,用于基于所述第二点云数据,确定所述托盘的类型,并确定所述托盘在地图坐标系中的位置信息,以供调取无人叉车至所述托盘的位置并进叉取下所述托盘。
32、示例性的,为实现上述目的,本申请还提供一种托盘定位设备,所述托盘定位设备包括存储器、处理器和存储在所述存储器上并可在所述处理器上运行的托盘定位程序,所述托盘定位程序被处理器执行时实现如上所述的托盘定位方法的步骤。
33、示例性的,为实现上述目的,本申请还提供一种计算机可读存储介质,所述计算机可读存储介质上存储有托盘定位程序,所述托盘定位程序被处理器执行时实现如上所述的托盘定位方法的步骤。
34、与现有技术中,以双目相机或tof相机采集深度图像进行托盘定位,但双目相机和tof相机易受光环境影响,导致采集的深度图像精度不高,进而导致定位精度不高相比。本申请获取雷达采集的预设扫描区域内的第一点云数据;所述预设扫描区域中包含托盘;从所述第一点云数据中提取所述托盘的第二点云数据;基于所述第二点云数据,确定所述托盘的类型,并确定所述托盘在地图坐标系中的位置信息,以供调取无人叉车至所述托盘的位置并进叉取下所述托盘。本申请在检测托盘时采用渲染雷达采集的点云图像,非真实相机拍摄的图像,不容易受到户外阳光的影响。因此,本申请基于雷达采集的点云渲染得到灰度图,对托盘进行精准定位。
技术特征:
1.一种托盘定位方法,其特征在于,所述方法包括:
2.如权利要求1所述的方法,其特征在于,所述从所述第一点云数据中提取所述托盘的第二点云数据,包括:
3.如权利要求2所述的方法,其特征在于,所述基于所述场景灰度图,提取所述托盘的第二点云数据,包括:
4.如权利要求3所述的方法,其特征在于,所述输入所述场景灰度图至深度检测模型,确定检测边界框中存在所述托盘图像的概率之前,包括:
5.如权利要求2所述的方法,其特征在于,所述基于所述第一点云数据,生成场景灰度图之前,包括:
6.如权利要求2所述的方法,其特征在于,所述基于所述第一点云数据,生成场景灰度图,包括:
7.如权利要求1所述的方法,其特征在于,所述基于所述第二点云数据,确定所述托盘在地图坐标系中的位置信息,包括:
8.一种托盘定位装置,其特征在于,所述装置包括:
9.一种托盘定位设备,其特征在于,所述托盘定位设备包括存储器、处理器和存储在所述存储器上并可在所述处理器上运行的托盘定位程序,所述托盘定位程序被所述处理器执行时实现如权利要求1至7中任一项所述的托盘定位方法的步骤。
10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质上存储有托盘定位程序,所述托盘定位程序被处理器执行时实现如权利要求1至7中任一项所述的托盘定位方法的步骤。
技术总结
本申请公开了一种托盘定位方法、装置、设备及可读存储介质,该方法包括步骤:获取雷达采集的预设扫描区域内的第一点云数据;所述预设扫描区域中包含托盘;从所述第一点云数据中提取所述托盘的第二点云数据;基于所述第二点云数据,确定所述托盘的类型,并确定所述托盘在地图坐标系中的位置信息,以供调取无人叉车至所述托盘的位置并进叉取下所述托盘。本申请在检测托盘时采用渲染雷达采集的点云图像,非真实相机拍摄的图像,不容易受到户外阳光的影响。因此,本申请基于雷达采集的点云渲染得到灰度图,对托盘进行精准定位。
技术研发人员:陈文成,吕朝顺,董邓伟
受保护的技术使用者:劢微机器人科技(深圳)有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!