一种地图动态更新方法、装置及可移动设备与流程
本发明涉及自动驾驶,尤其涉及一种地图动态更新方法、装置及可移动设备。
背景技术:
1、随着无人清扫车的广泛使用,作为无人清扫车关键技术之一的定位模块,其精度、效率以及鲁棒性显得尤为重要。而地图又是定位模块运行的基础,当无人清扫车处于变化的运行环境时,定位模块如果仍然依赖之前预设的地图,就会存在大概率定位跳动和定位丢失的风险,这种风险限制了无人清扫车在动态变化场景中的适用性。
技术实现思路
1、本发明的目的是针对现有技术所存在的缺陷,提供一种地图动态更新方法,该方法解决了当可移动设备处于变化的运行环境下,定位跳动和丢失的问题,从而大大提高了可移动设备在动态变化场景中的适用性。
2、为实现上述目的,本发明第一方面,提供一种地图动态更新方法,包括:
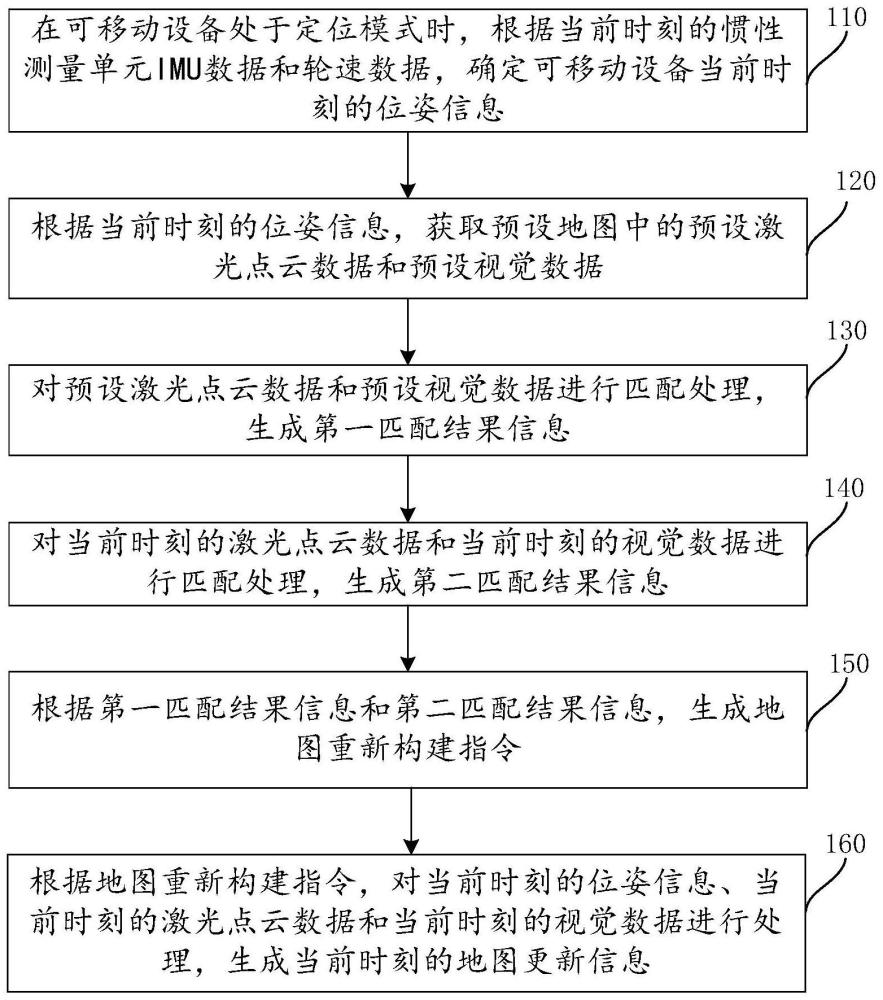
3、在可移动设备处于定位模式时,根据当前时刻的惯性测量单元imu数据和轮速数据,确定所述可移动设备当前时刻的位姿信息;
4、根据所述当前时刻的位姿信息,获取预设地图中的预设激光点云数据和预设视觉数据;
5、对所述预设激光点云数据和预设视觉数据进行匹配处理,生成第一匹配结果信息;
6、对当前时刻的激光点云数据和当前时刻的视觉数据进行匹配处理,生成第二匹配结果信息;
7、根据所述第一匹配结果信息和第二匹配结果信息,生成地图重新构建指令;
8、根据所述地图重新构建指令,对所述当前时刻的位姿信息、当前时刻的激光点云数据和当前时刻的视觉数据进行处理,生成当前时刻的地图更新信息。
9、本发明第二方面,提供一种地图动态更新装置,包括:
10、位姿确定模块,用于在可移动设备处于定位模式时,根据当前时刻的惯性测量单元imu数据和轮速数据,确定所述可移动设备当前时刻的位姿信息;
11、数据获取模块,用于根据所述当前时刻的位姿信息,获取预设地图中的预设激光点云数据和预设视觉数据;
12、数据匹配模块,用于对所述预设激光点云数据和预设视觉数据进行匹配处理,生成第一匹配结果信息;
13、数据匹配模块,还用于对当前时刻的激光点云数据和当前时刻的视觉数据进行匹配处理,生成第二匹配结果信息;
14、地图重新构建指令生成模块,用于根据所述第一匹配结果信息和第二匹配结果信息,生成地图重新构建指令;
15、地图更新信息生成模块,用于根据所述地图重新构建指令,对所述当前时刻的位姿信息、当前时刻的激光点云数据和当前时刻的视觉数据进行处理,生成当前时刻的地图更新信息。
16、本发明第三方面,提供一种计算机服务器,包括:存储器、处理器和收发器;
17、所述处理器用于与所述存储器耦合,读取并执行所述存储器中的指令,以实现上述第一方面任一项所述的地图动态更新方法;
18、所述收发器与所述处理器耦合,由所述处理器控制所述收发器进行消息收发。
19、本发明第四方面,提供一种芯片系统,包括处理器,所述处理器与存储器耦合,所述存储器存储有程序指令,当所述存储器存储的程序指令被所述处理器执行时实现上述第一方面任一项所述的地图动态更新方法。
20、本发明第五方面,提供一种计算机系统,包括存储器,以及与所述存储器通信连接的一个或多个处理器;
21、所述存储器中存储有可被所述一个或多个处理器执行的指令,所述指令被所述一个或多个处理器执行,以使所述一个或多个处理器实现如上述第一方面任一项所述的地图动态更新方法。
22、本发明第六方面,提供一种可移动设备,包括上述第三方面所述的计算机服务器。
23、本发明实施例提供的一种地图动态更新方法,该方法通过对定位有效性的判断,解决了当可移动设备处于变化的运行环境下,定位跳动和丢失的问题,从而大大提高了可移动设备在动态变化场景中的适用性。
技术特征:
1.一种地图动态更新方法,其特征在于,包括:
2.根据权利要求1所述的地图动态更新方法,其特征在于,所述根据当前时刻的惯性测量单元imu和轮速数据,确定所述可移动设备当前时刻的位姿信息,具体包括:
3.根据权利要求1所述的地图动态更新方法,其特征在于,所述对所述预设激光点云数据和预设视觉数据进行匹配处理,生成第一匹配结果信息,具体包括:
4.根据权利要求1所述的地图动态更新方法,其特征在于,所述根据所述第一匹配结果信息和第二匹配结果信息,生成地图重新构建指令,具体包括:
5.根据权利要求1所述的地图动态更新方法,其特征在于,所述生成当前时刻的地图更新信息之后,还包括:
6.一种地图动态更新装置,其特征在于,包括:
7.一种计算机服务器,其特征在于,包括:存储器、处理器和收发器;
8.一种芯片系统,其特征在于,包括处理器,所述处理器与存储器耦合,所述存储器存储有程序指令,当所述存储器存储的程序指令被所述处理器执行时实现权利要求1-5任一项所述的地图动态更新方法。
9.一种计算机系统,其特征在于,包括存储器,以及与所述存储器通信连接的一个或多个处理器;
10.一种可移动设备,其特征在于,包括上述权利要求7所述的计算机服务器。
技术总结
本发明实施例涉及一种地图动态更新方法,包括:在可移动设备处于定位模式时,根据当前时刻的惯性测量单元IMU数据和轮速数据,确定可移动设备当前时刻的位姿信息;根据当前时刻的位姿信息,获取预设地图中的预设激光点云数据和预设视觉数据;对预设激光点云数据和预设视觉数据进行匹配处理,生成第一匹配结果信息;对当前时刻的激光点云数据和当前时刻的视觉数据进行匹配处理,生成第二匹配结果信息;根据第一匹配结果信息和第二匹配结果信息,生成地图重新构建指令;根据地图重新构建指令,对当前时刻的位姿信息、当前时刻的激光点云数据和当前时刻的视觉数据进行处理,生成当前时刻的地图更新信息。
技术研发人员:崔市伟,曾子诚
受保护的技术使用者:北京智行者科技股份有限公司
技术研发日:
技术公布日:2024/3/31
- 还没有人留言评论。精彩留言会获得点赞!