通过激光瞄准定位辅助智能印章盖章的方法与流程
本发明涉及印章盖章,具体涉及通过激光瞄准定位辅助智能印章盖章的方法。
背景技术:
1、印章,用作印于文件上表示鉴定或签署的文具,一般印章都会先沾上颜料再印上,不沾颜料、印上平面后会呈现凹凸的称为钢印,有些是印于蜡或火漆上、信封上的蜡印。制作材质有玉石、金属、木头、石头等,印章是传统文化的代表之一。
2、随着经济及组织规模的发展,印章的种类、数量不断增多,加大企业对于印章的管理难度及管理风险,现有的传统印章没有通过系统把控,而将智能印章硬件应用到实际中来,能够起到传统印章的作用,也能降低管理的难度与风险,而该控制电路正是为了实现上述目的。
3、而在现有的智能印章产品中,瞄准盖章位置基本是通过肉眼去判断位置,智能印章下盖位置可能不准确,有可能导致用户重新盖章,无形之中也降低了盖章的控制效率,导致用户体验不佳。
技术实现思路
1、本发明的目的在于提供通过激光瞄准定位辅助智能印章盖章的方法,具备激光辅助瞄准定位的功能,不仅提高其盖章的准确性,而且避免了二次盖章的繁琐操作,同时提高了盖章的效率以及提高了用于的体验,以解决上述背景技术中提出的问题。
2、为实现上述目的,本发明提供如下技术方案:通过激光瞄准定位辅助智能印章盖章的方法,包括如下步骤:
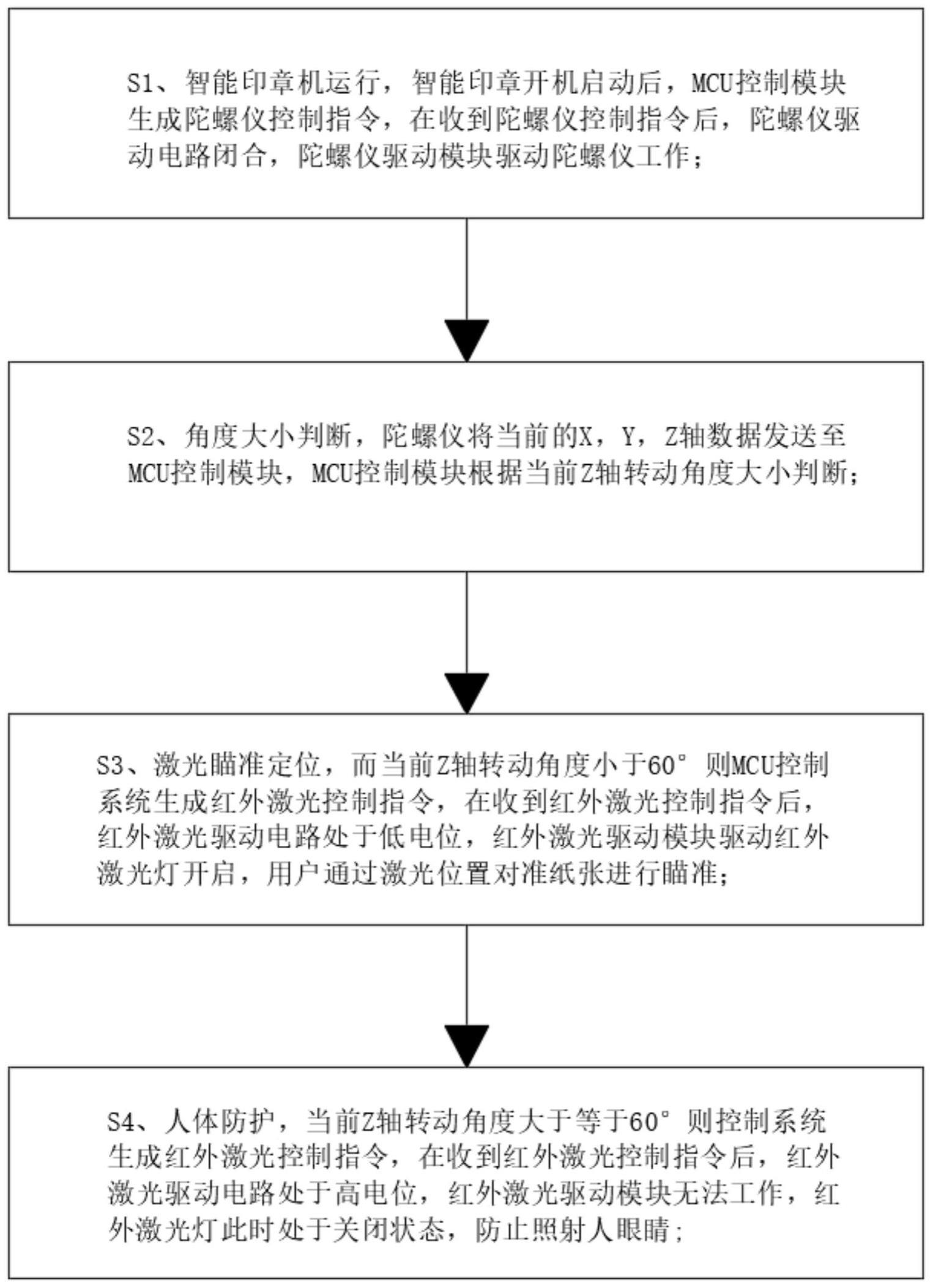
3、s1、智能印章机运行,智能印章开机启动后,mcu控制模块生成陀螺仪控制指令,在收到陀螺仪控制指令后,陀螺仪驱动电路闭合,陀螺仪驱动模块驱动陀螺仪工作;
4、s2、角度大小判断,陀螺仪将当前的x,y,z轴数据发送至mcu控制模块,mcu控制模块根据当前z轴转动角度大小判断;
5、s3、激光瞄准定位,而当前z轴转动角度小于60°则mcu控制系统生成红外激光控制指令,在收到红外激光控制指令后,红外激光驱动电路处于低电位,红外激光驱动模块驱动红外激光灯开启,用户通过激光位置对准纸张进行瞄准;
6、s4、人体防护,当前z轴转动角度大于等于60°则控制系统生成红外激光控制指令,在收到红外激光控制指令后,红外激光驱动电路处于高电位,红外激光驱动模块无法工作,红外激光灯此时处于关闭状态,防止照射人眼睛。
7、优选的,智能印章机运行时控制运行检查,包括如下步骤:
8、检查各线路连接位置是否松动,同时观测各控制按键是否成未开启状态,以及上次操作指令是否取消,以避免开机时出现指令为取消发生机体紫云县的现象发生;
9、并且以人眼观测章体为抬起还是落下状态。
10、优选的,智能印章机运行时控制运行操作,包括如下步骤:
11、通过智能印章控制系统,实现控制红外激光模块,控制红外激光的打开与关闭;
12、而智能印章控制系统包括mcu控制模块、红外激光模块、陀螺仪模块;
13、mcu控制模块,用于系统生成相应的控制指令,所属控制指令包括红外激光控制指令,陀螺仪控制指令;
14、红外激光模块,用于接收mcu控制模块发送的红外激光控制指令,并根据红外激光控制指令驱动红外激光灯开启或关闭;
15、陀螺仪驱动模块,用于接收mcu控制模块发送的陀螺仪控制指令,并根据陀螺仪控制指令驱动陀螺仪开启或关闭。
16、优选的,用于角度大小的判断操作控制,包括如下步骤:
17、陀螺仪驱动电路与mcu控制模块连接,在接收到陀螺仪控制指令时,陀螺仪驱动电路闭合;陀螺仪驱动电路与陀螺仪驱动模块串联连接,在陀螺仪驱动电路闭合时,陀螺仪驱动模块驱动陀螺仪工作;
18、同时陀螺仪将x,y,z轴数据反馈到mcu控制模块,mcu控制模块根据参数的变化判断,生成红外激光控制指令,通过红外激光控制指令,以使其到达所需的角度大小进行调整校准;
19、最后根据自身所在轴的位置进行方向以及角度进行判断调整即可
20、优选的,角度大小的判断内的间距位置调整,包括如下步骤:
21、根据自身所在轴的位置,依次来判断预测自身位置亦或是初始位置与盖章位置的距离,从而自动移动至需要盖章位置的上方即可;
22、当其移动预设位置的上方时会等待下一步的指令以及最后的瞄准定位工作。
23、优选的,激光瞄准定位运行时,包括如下步骤;
24、控制系统还包括红外激光驱动电路和陀螺仪驱动电路;
25、红外激光驱动电路与mcu控制模块连接,在接收到红外激光控制指令时,红外激光驱动电路闭合;所述红外激光驱动电路与红外激光驱动模块串联连接,在所述红外激光驱动电路闭合时,所述红外激光驱动模块驱动所述红外激光灯工作;
26、在其定位瞄准时根据当前自身处于z轴转动的角度,其角度在预设的范围内即可如60°内即可产生控制指令使其进行工作;
27、当收到红外激光控制指令之后其会处于一个较低的电位,即为低电位,随后红外激光灯被启动,这时通过激光照射的位置即可实现对所要盖章的纸张进行辅助瞄准定位工作。
28、优选的,运行时需对人体的防护,包括如下步骤:
29、与上述指令控制相反,其在进行防护时,基于z轴是否会大于60°,之后控制系统对红外激光输送控制指令,这时的驱动的电路电位为高电位;
30、最后处于高电位的红外激光驱动模块会即刻停止工作,而红外激光灯会停止照射即为关闭的状态,此时便可达到防止照射观测人员以及操作人员的眼部实现人体眼部的防护。
31、与现有技术相比,本发明的有益效果是:
32、1、本发明通过智能印章控制系统以及其内部的红外激光驱动模块以及红外激光灯的设置,具备激光辅助瞄准定位的功能,不仅提高其盖章的准确性,而且避免了二次盖章的繁琐操作,同时提高了盖章的效率以及提高了用于的体验,利用x,y,z轴的坐标轴的数据,根据所在z轴的角度来启动红外激光灯,从而用于对所需纸张的准纸张进行瞄准的作用。
技术特征:
1.通过激光瞄准定位辅助智能印章盖章的方法,其特征在于:包括如下步骤:
2.根据权利要求1所述的通过激光瞄准定位辅助智能印章盖章的方法,其特征在于:智能印章机运行时控制运行检查,包括如下步骤:
3.根据权利要求2所述的通过激光瞄准定位辅助智能印章盖章的方法,其特征在于:智能印章机运行时控制运行操作,包括如下步骤:
4.根据权利要求1所述的通过激光瞄准定位辅助智能印章盖章的方法,其特征在于:用于角度大小的判断操作控制,包括如下步骤:
5.根据权利要求1所述的通过激光瞄准定位辅助智能印章盖章的方法,其特征在于:角度大小的判断内的间距位置调整,包括如下步骤:
6.根据权利要求1所述的通过激光瞄准定位辅助智能印章盖章的方法,其特征在于:激光瞄准定位运行时,包括如下步骤;
7.根据权利要求1所述的通过激光瞄准定位辅助智能印章盖章的方法,其特征在于:运行时需对人体的防护,包括如下步骤:
技术总结
本发明属于印章盖章技术领域,公开了通过激光瞄准定位辅助智能印章盖章的方法,在本发明中智能印章机运行,智能印章开机启动后,MCU控制模块生成陀螺仪控制指令,在收到陀螺仪控制指令后,陀螺仪驱动电路闭合,角度大小判断,陀螺仪将当前的X,Y,Z轴数据发送至MCU控制模块;本发明通过智能印章控制系统以及其内部的红外激光驱动模块以及红外激光灯的设置,具备激光辅助瞄准定位的功能,不仅提高其盖章的准确性,而且避免了二次盖章的繁琐操作,同时提高了盖章的效率以及提高了用于的体验,利用X,Y,Z轴的坐标轴的数据,根据所在Z轴的角度来启动红外激光灯,从而用于对所需纸张的准纸张进行瞄准的作用。
技术研发人员:高渭泉,温玲,吴迪,吴日庆,林锦伟
受保护的技术使用者:广东志特新材料集团有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!