基于模仿学习的单体无人机自主运动规划方法
本发明涉及一种基于模仿学习的单体无人机自主运动规划方法,属于无人机。
背景技术:
1、近年来,对于无人机的研究取得了巨大的进步,人们已经逐渐习惯利用它去完成高空摄影,灾难现场搜救,未知洞穴及火星探索等任务,目前也有很多成熟的无人机产品用于商业、农业,甚至是军事战争中。出现这种情况的原因之一是计算机芯片计算能力的快速发展,使得原本一些复杂的数学优化问题可以在很短的时间内被求解出来。同时,在运动规划领域,一些新的规划方法的出现,可以让机器人可以在更为复杂的环境下更好的完成特定任务。这些较为先进的算法部署在了各类机器人上,并取得了很好的避障效果。目前在大多数情况下,无人机的操纵都是由具有一定经验的人类飞手通过远程遥控无人机完成的,此时的无人机不具备自主运动规划能力。因此,提升无人机的自主性成为了很多学者的研究目标,其中运动规划领域需要在有限时间和机载计算资源的情况下,计算出安全的,满足动力学约束可行轨迹的方法。
2、当前存在的无人机自主运动规划方法,大多数是按照顺序执行环境感知建图、运动规划、决策控制和控制指令传递给执行机构这四个子任务模块。所有的子模块顺序执行时,难免会导致总处理时间增加,必须走完整个流程才可以让无人机避开障碍物。特别是在感知建图环节,需要对原始感知信息进一步处理,这无疑会大大增加算法的总体处理时间,因此无法兼顾避障成功率和飞行速度。
技术实现思路
1、本发明是为了解决上述问题而进行的,目的在于提供一种基于模仿学习的单体无人机自主运动规划方法。
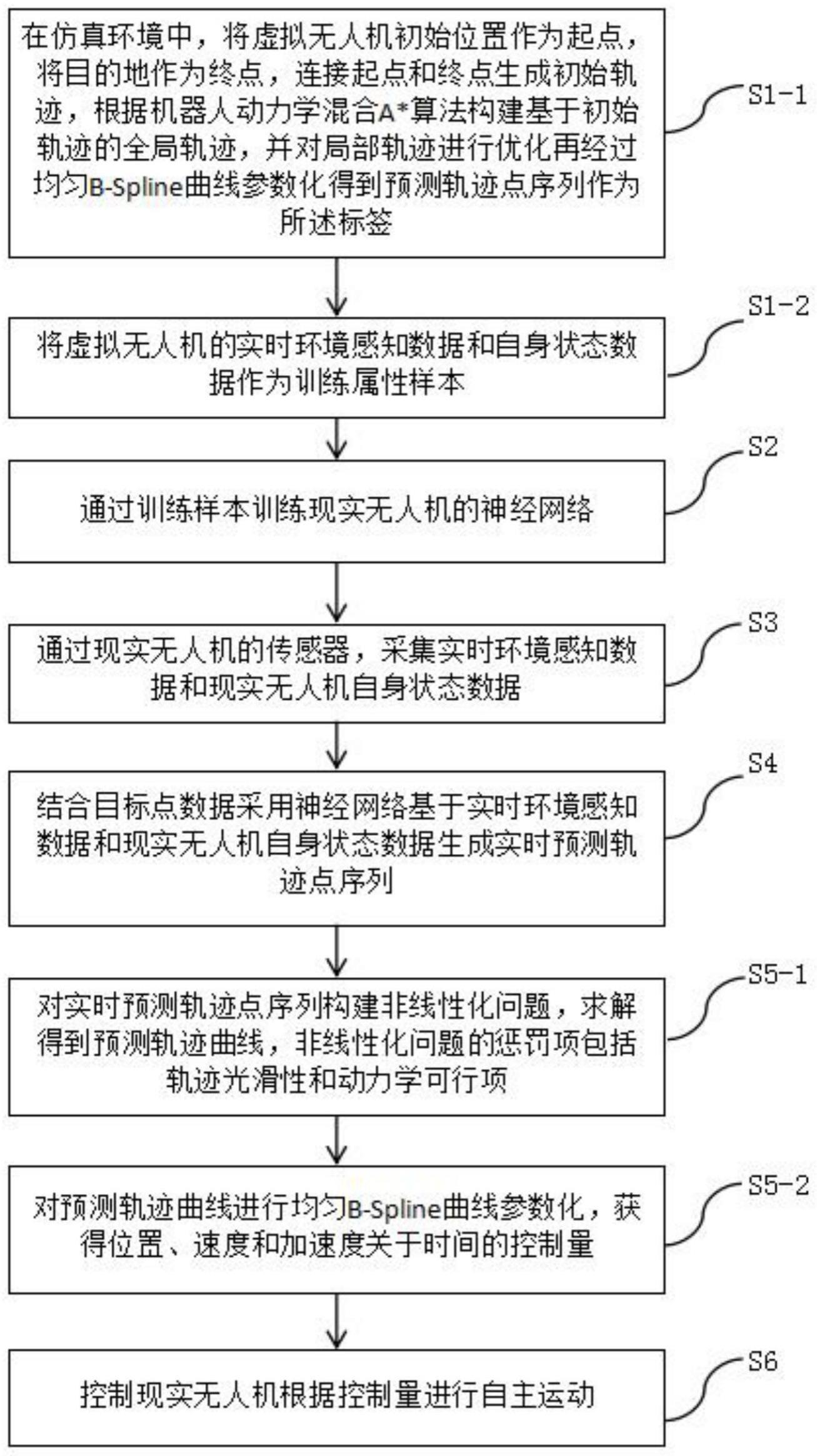
2、本发明提供了一种基于模仿学习的单体无人机自主运动规划方法,具有这样的特征,构建一个仿真环境并在仿真环境中基于现实无人机构建相应的虚拟无人机模型,包括以下步骤:步骤s1,基于仿真环境获得虚拟无人机进行轨迹规划的训练样本,训练样本包括训练属性样本和标签;步骤s2,通过训练样本训练现实无人机的神经网络;步骤s3,通过现实无人机的传感器,采集实时环境感知数据和现实无人机自身状态数据;步骤s4,结合目标点数据采用神经网络基于实时环境感知数据和现实无人机自身状态数据生成实时预测轨迹点序列;步骤s5,将实时预测轨迹点序列生成轨迹并优化得到预测轨迹曲线,对预测轨迹曲线进行均匀b-spline曲线参数化获得控制量;步骤s6,控制现实无人机根据控制量进行自主运动。
3、在本发明提供的基于模仿学习的单体无人机自主运动规划方法中,还可以具有这样的特征:其中,步骤s1包括以下子步骤:步骤s1-1,在仿真环境中,将虚拟无人机初始位置作为起点,将目的地作为终点,连接起点和终点生成初始轨迹,根据机器人动力学混合a*算法构建基于初始轨迹的全局轨迹,并对局部轨迹进行优化得到优化轨迹,再经过均匀b-spline曲线参数化得到预测轨迹点序列作为标签;步骤s1-2,将虚拟无人机的实时环境感知数据和自身状态数据作为训练属性样本。
4、在本发明提供的基于模仿学习的单体无人机自主运动规划方法中,还可以具有这样的特征:其中,在步骤s1-2中,虚拟无人机的实时环境感知数据包括虚拟无人机跟随优化轨迹的实时环境深度图像数据,虚拟无人机的自身状态数据包括当前时刻虚拟无人机的三维位置、偏航角、旋转矩阵、速度和加速度数据。
5、在本发明提供的基于模仿学习的单体无人机自主运动规划方法中,还可以具有这样的特征:其中,在步骤s2中,神经网络将训练属性样本分为深度图像分支和无人机状态分支并生成对应的特征向量,将特征向量输入模仿学习网络模型获得实时预测轨迹点序列。
6、在本发明提供的基于模仿学习的单体无人机自主运动规划方法中,还可以具有这样的特征:其中,深度图像分支包括mobilenet-v3网络。
7、在本发明提供的基于模仿学习的单体无人机自主运动规划方法中,还可以具有这样的特征:其中,神经网络包括三个损失函数,该三个损失函数为:标签与实时预测轨迹点之间的对比差值损失、无人机自身实时预测轨迹与环境中最近障碍物的距离损失和实时预测轨迹点之间保持固定距离的损失。
8、在本发明提供的基于模仿学习的单体无人机自主运动规划方法中,还可以具有这样的特征:其中,通过虚拟无人机的实时环境感知数据获得环境点云信息,通过环境点云信息得到无人机自身实时预测轨迹与环境中最近障碍物的距离损失。
9、在本发明提供的基于模仿学习的单体无人机自主运动规划方法中,还可以具有这样的特征:其中,在步骤s3中,实时环境感知数据包括现实无人机飞行过程中的实时环境深度图像数据和目的地的指向数据,现实无人机自身状态数据包括当前时刻现实无人机的三维位置、偏航角、旋转矩阵、速度和加速度数据。
10、在本发明提供的基于模仿学习的单体无人机自主运动规划方法中,还可以具有这样的特征:其中,步骤s5包括以下子步骤:
11、步骤s5-1,对实时预测轨迹点序列构建非线性化问题,求解得到预测轨迹曲线,非线性化问题的惩罚项包括轨迹光滑性和动力学可行项;步骤s5-2,对预测轨迹曲线进行均匀b-spline曲线参数化,获得位置、速度和加速度关于时间的控制量。
12、在本发明提供的基于模仿学习的单体无人机自主运动规划方法中,还可以具有这样的特征:其中,在步骤s6中,若现实无人机在自主运动过程中出现满足紧急停止的情况,则执行紧急停止的决策,控制现实无人机紧急停止。
13、发明的作用与效果
14、根据本发明所涉及的基于模仿学习的单体无人机自主运动规划方法,构建一个仿真环境并在仿真环境中基于现实无人机构建相应的虚拟无人机模型,因为首先基于仿真环境获得虚拟无人机进行轨迹规划的训练样本,训练样本包括训练属性样本和标签,其次通过训练样本训练现实无人机的神经网络,然后通过现实无人机的传感器,采集实时环境感知数据和现实无人机自身状态数据,接着结合目标点数据采用神经网络基于实时环境感知数据和现实无人机自身状态数据生成实时预测轨迹点序列,再将实时预测轨迹点序列生成轨迹并优化得到预测轨迹曲线,对预测轨迹曲线进行均匀b-spline曲线参数化获得控制量,最后控制现实无人机根据控制量进行自主运动。所以,本发明的基于模仿学习的单体无人机自主运动规划方法能兼顾避障成功率和无人机飞行速度。
技术特征:
1.一种基于模仿学习的单体无人机自主运动规划方法,其特征在于,构建一个仿真环境并在仿真环境中基于现实无人机构建相应的虚拟无人机模型,包括以下步骤:
2.根据权利要求1所述的基于模仿学习的单体无人机自主运动规划方法,其特征在于,
3.根据权利要求2所述的基于模仿学习的单体无人机自主运动规划方法,其特征在于,
4.根据权利要求1所述的基于模仿学习的单体无人机自主运动规划方法,其特征在于,
5.根据权利要求4所述的基于模仿学习的单体无人机自主运动规划方法,其特征在于,
6.根据权利要求4所述的基于模仿学习的单体无人机自主运动规划方法,其特征在于,
7.根据权利要求6所述的基于模仿学习的单体无人机自主运动规划方法,其特征在于,
8.根据权利要求1所述的基于模仿学习的单体无人机自主运动规划方法,其特征在于,
9.根据权利要求1所述的基于模仿学习的单体无人机自主运动规划方法,其特征在于,
10.根据权利要求1所述的基于模仿学习的单体无人机自主运动规划方法,其特征在于,
技术总结
本发明提供了一种基于模仿学习的单体无人机自主运动规划方法。构建一个仿真环境并在仿真环境中基于现实无人机构建相应的虚拟无人机模型,包括以下步骤:步骤S1,基于仿真环境获得虚拟无人机进行轨迹规划的训练样本;步骤S2,通过训练样本训练现实无人机的神经网络;步骤S3,通过现实无人机的传感器,采集实时环境感知数据和现实无人机自身状态数据;步骤S4,结合目标点数据采用神经网络基于实时环境感知数据和现实无人机自身状态数据生成实时预测轨迹点序列;步骤S5,将实时预测轨迹点序列转化为控制量;步骤S6,控制现实无人机根据控制量进行自主运动。本方法能够很好的兼顾避障成功率和无人机飞行速度,具有极大的应用前景。
技术研发人员:李伟,王冀,张隆源,侯梓越,刘子昂
受保护的技术使用者:复旦大学
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!