基于超宽带UWB技术的定位方法、系统及可自主移动设备与流程
本公开涉及定位,尤其涉及一种基于超宽带uwb技术的定位方法、系统及可自主移动设备。
背景技术:
1、目前,超宽带(ultra-wideband,uwb)技术作为一种短距互联和无线定位技术将拥有广阔的应用前景。uwb技术凭借其独特的精确测距和定位技术,能够让设备具备空间感知能力,以感应附近其他配备uwb技术的设备,并准确判断出彼此的位置关系,从而实现各种不同的应用场景。
2、针对定位服务应用场景,相关技术中,可以在车辆的不同位置配备4个uwb天线,用于测量车辆与对端设备的四个不同的距离,进而解析确定对端设备的位置。上述方案中,对4个uwb天线的间距有要求,难以适用于小型设备的对端设备的定位。
技术实现思路
1、本公开提供一种基于超宽带uwb技术的定位方法、系统及可自主移动设备。
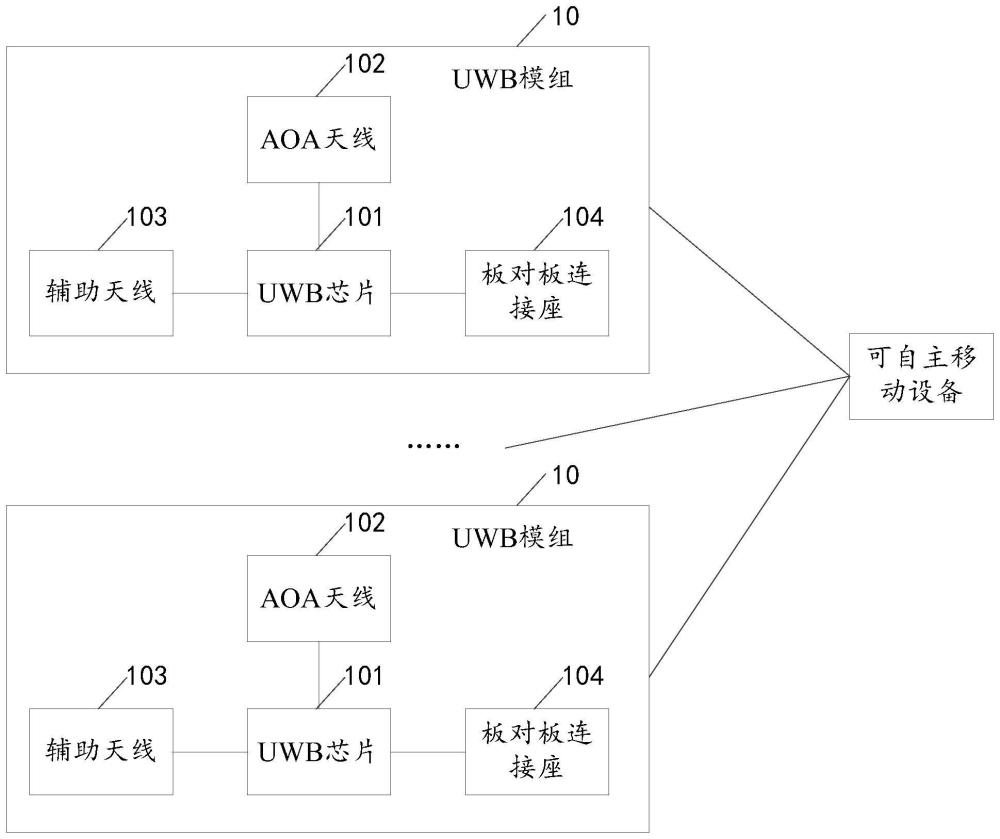
2、根据本公开实施例的第一方面,提供一种基于超宽带uwb技术的定位系统,包括:至少三个uwb模组;其中,至少三个所述uwb模组设置在可自主移动设备上的不同位置,且至少三个所述uwb模组的总水平覆盖角度为水平全向角度;所述uwb模组包括:uwb芯片,以及与所述uwb芯片连接的角度定位aoa天线;所述aoa天线,对与所述可自主移动设备通信的对端设备进行距离角度测量,获取测量结果;所述uwb芯片,将所述测量结果发送至所述可自主移动设备,以确定所述对端设备与所述可自主移动设备之间的相对位置信息。
3、在本公开的一个实施例中,所述aoa天线包括:第一aoa天线和第二aoa天线;所述第一aoa天线和所述第二aoa天线的组合,用于测量所述可自主移动设备与所述对端设备之间的水平角度信息;所述第一aoa天线,用于测量所述可自主移动设备与所述对端设备之间的距离信息。
4、在本公开的一个实施例中,所述aoa天线还包括:第三aoa天线;所述第一aoa天线和所述第三aoa天线的组合,用于测量所述可自主移动设备与所述对端设备之间的俯仰角度信息。
5、在本公开的一个实施例中,所述uwb模组还包括:与所述uwb芯片连接的辅助天线;所述辅助天线,用于辅助所述aoa天线测量所述可自主移动设备与所述对端设备之间的距离信息。
6、在本公开的一个实施例中,所述uwb模组的形式为pcb板;所述pcb板的z轴正方向朝向所述可自主移动设备的外侧。
7、在本公开的一个实施例中,所述uwb模组的水平覆盖角度大于或者等于120度。
8、在本公开的一个实施例中,所述aoa天线为贴片天线或者平面倒f天线。
9、在本公开的一个实施例中,所述辅助天线为倒l天线或者倒f天线。
10、在本公开的一个实施例中,所述uwb模组还包括:板对板连接座,用于连接所述uwb芯片和所述可自主移动设备。
11、在本公开的一个实施例中,所述可自主移动设备为机器人或者机器狗;所述对端设备包括遥控设备和/或充电设备。
12、根据本公开实施例的第二方面,还提供一种可自主移动设备,所述可自主移动设备上设置有如上所述的基于超宽带uwb技术的定位系统。
13、在本公开的一个实施例中,所述定位系统包括四个uwb模组;四个所述uwb模组分别设置在以下位置:所述可自主移动设备的前侧、后侧、左侧和右侧。
14、在本公开的一个实施例中,所述定位系统包括四个uwb模组;所述可自主移动设备为机器狗;四个所述uwb模组分别设置在以下位置:所述机器狗的前胸、后脑、身体左侧和身体右侧。
15、根据本公开实施例的第三方面,还提供一种基于超宽带uwb技术的定位方法,应用于可自主移动设备,所述可自主移动设备上设置有如上所述的基于超宽带uwb技术的定位系统,所述方法包括:获取所述定位系统中至少三个uwb模组的测量结果;其中,所述测量结果为所述uwb模组对与所述可自主移动设备通信的对端设备进行距离角度测量得到的测量结果;根据所述测量结果,确定所述对端设备与所述可自主移动设备之间的相对位置信息。
16、在本公开的一个实施例中,所述测量结果包括以下至少一项:距离信息、水平角度信息、俯仰角度信息、接收信号强度指示、信道冲激响应。
17、根据本公开实施例的第四方面,还提供一种基于超宽带uwb技术的定位装置,应用于可自主移动设备,所述可自主移动设备上设置有如上所述的基于超宽带uwb技术的定位系统,所述装置包括:获取模块,用于获取所述定位系统中至少三个uwb模组的测量结果;其中,所述测量结果为所述uwb模组对与所述可自主移动设备通信的对端设备进行距离角度测量得到的测量结果;确定模块,用于根据所述测量结果,确定所述对端设备与所述可自主移动设备之间的相对位置信息。
18、在本公开的一个实施例中,所述测量结果包括以下至少一项:距离信息、水平角度信息、俯仰角度信息、接收信号强度指示、信道冲激响应。
19、根据本公开实施例的第五方面,还提供一种电子设备,包括:处理器;用于存储所述处理器可执行指令的存储器;其中,所述处理器被配置为执行所述指令,以实现如上所述的基于超宽带uwb技术的定位方法。
20、根据本公开实施例的第六方面,还提供一种非临时性计算机可读存储介质,当所述存储介质中的指令由处理器执行时,使得处理器能够执行如上所述的基于超宽带uwb技术的定位方法。
21、本公开的实施例提供的技术方案至少带来以下有益效果:
22、提供一种基于超宽带uwb技术的定位系统,包括:至少三个uwb模组;其中,至少三个uwb模组设置在可自主移动设备上的不同位置,且至少三个uwb模组的总水平覆盖角度为水平全向角度;uwb模组包括:uwb芯片,以及与uwb芯片连接的角度定位aoa天线;aoa天线,对与可自主移动设备通信的对端设备进行距离角度测量,获取测量结果;uwb芯片,将测量结果发送至可自主移动设备,以确定对端设备与可自主移动设备之间的相对位置信息,从而能够实现对端设备的距离测量以及角度测量,进而对对端设备进行定位,其中,对多个uwb模组之间的角度测量,使得多个uwb模组之间不需要间距限定,可以适用于小型设备的对端设备的定位。
23、应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本公开。
技术特征:
1.一种基于超宽带uwb技术的定位系统,其特征在于,包括:
2.根据权利要求1所述的系统,其特征在于,所述aoa天线包括:第一aoa天线和第二aoa天线;
3.根据权利要求2所述的系统,其特征在于,所述aoa天线还包括:第三aoa天线;
4.根据权利要求1所述的系统,其特征在于,所述uwb模组还包括:与所述uwb芯片连接的辅助天线;
5.根据权利要求1所述的系统,其特征在于,所述uwb模组的形式为pcb板;
6.根据权利要求1所述的系统,其特征在于,所述uwb模组的水平覆盖角度大于或者等于120度。
7.根据权利要求1所述的系统,其特征在于,所述aoa天线为贴片天线或者平面倒f天线。
8.根据权利要求4所述的系统,其特征在于,所述辅助天线为倒l天线或者倒f天线。
9.根据权利要求1所述的系统,其特征在于,所述uwb模组还包括:板对板连接座,用于连接所述uwb芯片和所述可自主移动设备。
10.根据权利要求1所述的系统,其特征在于,所述可自主移动设备为机器人或者机器狗;
11.一种可自主移动设备,其特征在于,所述可自主移动设备上设置有如权利要求1至10中任一项所述的基于超宽带uwb技术的定位系统。
12.根据权利要求11所述的设备,其特征在于,所述定位系统包括四个uwb模组;
13.根据权利要求11所述的设备,其特征在于,所述定位系统包括四个uwb模组;所述可自主移动设备为机器狗;
14.一种基于超宽带uwb技术的定位方法,其特征在于,应用于可自主移动设备,所述可自主移动设备上设置有如权利要求1至10中任一项所述的基于超宽带uwb技术的定位系统,所述方法包括:
15.根据权利要求14所述的方法,其特征在于,所述测量结果包括以下至少一项:距离信息、水平角度信息、俯仰角度信息、接收信号强度指示、信道冲激响应。
16.一种基于超宽带uwb技术的定位装置,其特征在于,应用于可自主移动设备,所述可自主移动设备上设置有如权利要求1至10中任一项所述的基于超宽带uwb技术的定位系统,所述装置包括:
17.根据权利要求16所述的装置,其特征在于,所述测量结果包括以下至少一项:距离信息、水平角度信息、俯仰角度信息、接收信号强度指示、信道冲激响应。
18.一种电子设备,其特征在于,包括:
19.一种非临时性计算机可读存储介质,当所述存储介质中的指令由处理器执行时,使得处理器能够执行如权利要求14至15中任一项所述的基于超宽带uwb技术的定位方法。
技术总结
本公开关于一种基于超宽带UWB技术的定位方法、系统及可自主移动设备,其中,该系统包括:至少三个UWB模组;其中,至少三个UWB模组设置在可自主移动设备上的不同位置,且至少三个UWB模组的总水平覆盖角度为水平全向角度;UWB模组包括:UWB芯片,以及与UWB芯片连接的角度定位AOA天线;AOA天线,对与可自主移动设备通信的对端设备进行距离角度测量,获取测量结果;UWB芯片,将测量结果发送至可自主移动设备,以确定对端设备与可自主移动设备之间的相对位置信息,从而能够实现对端设备的距离测量以及角度测量,进而对对端设备进行定位,其中,对多个UWB模组之间的角度测量,使得多个UWB模组之间不需要间距限定,可以适用于小型设备的对端设备的定位。
技术研发人员:蒋晓镭,孔亚旭,乔光军
受保护的技术使用者:北京小米移动软件有限公司
技术研发日:
技术公布日:2024/4/29
- 还没有人留言评论。精彩留言会获得点赞!