一种基于多频点解模糊的水下声呐测向方法
本发明属于声呐信号处理领域。具体涉及到一种基于多频点解模糊的水下声呐测向方法。
背景技术:
0、技术背景
1、目前雷达与声呐领域广泛使用干涉仪进行测向。而基线长度与测向精度之间存在正比关系。基线长度越长,精度越高。但当基线长度大于阵元接收信号的半波长时,会出现相位模糊的情况,从而导致测角模糊。为了追求测向的高精度的宽视角,基线长度通常较长,相位差的模糊问题无法避免。故相位解模糊成为相位干涉仪测向的重要流程。大部分学者提出的相位解模糊算法大多限制了基线长度。本发明在利用干涉仪发射多频点信号的基础上,利用多频点实现相位解模糊,将其应用到水下声呐领域,实现水下声呐测向。
技术实现思路
1、针对现有技术的不足,本发明的目的在于提供一种基于多频点解模糊的水下声呐测向方法,以解决现有技术中存在的相位模糊的问题。
2、为解决上述技术问题,本发明所采用的技术方案是:
3、一种基于多频点解模糊的水下声呐测向方法,所述方法包括以下步骤:
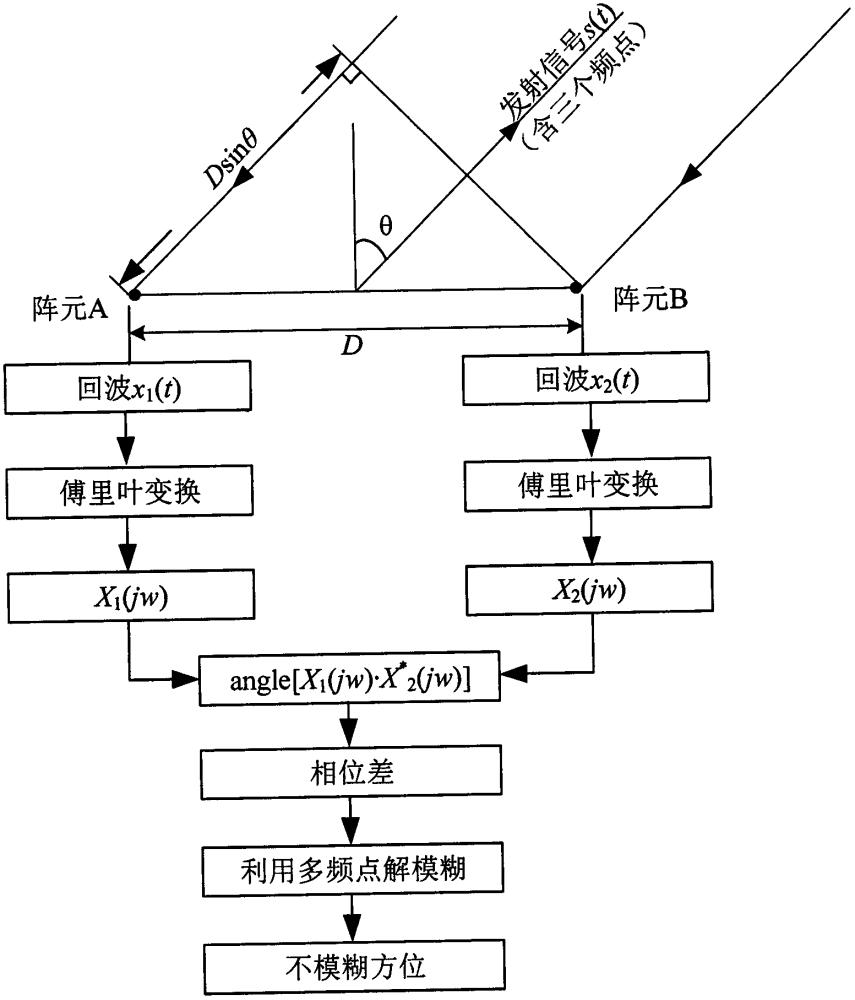
4、步骤1,建立单频信号的发射信号模型,基于干涉仪的原理,分别得到不同阵元的雷达回波信号。对回波信号进行傅里叶变换处理。利用求相位角函数得到两阵元的相位差。
5、步骤2,发射多个频点的单频信号,得到不同频点下两阵元的相位差。
6、步骤3,利用不同频点下阵元相位差以及角度的关系,进行解模糊求角。
7、与现有技术相比,本发明的有益效果为:
8、克服改变基线长度带来的相位模糊的问题,利用多频点解模糊可以在获得高精度角度的前提下,实现相位解模糊。
技术特征:
1.一种基于多频点解模糊的水下声呐测向方法,所述方法包括如下步骤:
2.如权利要求1所述的一种基于多频点解模糊的水下声呐测向方法,其特征在于克服改变基线长度带来的相位模糊的问题,利用多频点解模糊可以在获得高精度角度的前提下,实现相位解模糊。步骤3包含以下子步骤:
技术总结
本发明属于声呐信号处理领域,公开了一种基于多频点解模糊的水下声呐测向方法。该方法基于宽带干涉仪的原理,利用多频点解决基线长度大于阵元接收信号半波长时存在的相位模糊问题,最终得到不模糊的目标角度。该方法运算量小且对信噪比要求低。
技术研发人员:王峰,卢钰情
受保护的技术使用者:河海大学
技术研发日:
技术公布日:2024/5/10
- 还没有人留言评论。精彩留言会获得点赞!