一种用于直升机辅助导航的点云数据处理方法与流程
本发明属飞行器辅助导航领域,具体涉及一种用于直升机辅助导航的点云数据处理方法。
背景技术:
1、直升机由于其优良的低空飞行特性及起降方便优势,而被广泛应用于侦察测绘、物资运输、抗灾救援等军、民用领域。然而,在山地、高原、沙漠、森林等复杂地形条件下,或遇到黑夜、雨雪、大雾等不良目视环境时,直升机的起飞、飞行、着陆环境充满未知性,驾驶员的视觉能力受到严重限制,极易导致事故发生。
2、激光雷达(lidar)作为主动式3d传感器,能将直升机对外部环境的探测感知由二维信息提升至三维信息,能够在部分不良目视环境下保证载机的探测感知能力,同时具有对视场范围内高压线等细小障碍物三维探测的能力,是提高不良目视环境下直升机生存能力的关键传感器之一。
3、在低空飞行和进近着陆阶段,机载激光雷达探测到的原始点云数据十分复杂,直接显示会造成视觉混乱,难以感知障碍物,必须对点云数据进行处理识别。处理后的点云数据具有三维感知的优势,可以在头盔显示器上生成基于增强现实的三维显示符号,能够在提供的空间感知能力的同时辅助飞行员感知态势信息,从而大幅提升直升机的飞行安全能力。
4、然而,目前已有的机载点云数据处理方法主要集中在测绘领域,其通常是在机载平台下探测、存储点云数据后,机下针对不同场景特点采用不同方法生成高精度数字地图,但在直升机辅助导航应用中,激光雷达的探测和处理在载机上同时进行,有实时性和地形自适应性要求,传统的点云数据处理方法无法适用。
技术实现思路
1、为了克服现有技术的不足,本发明提供一种用于直升机辅助导航的点云数据处理方法。通过基于布料模拟滤波的点云地形自适应分割、结合svm和hough变换的地物点云识别等步骤,对激光雷达点云数据实时、自适应处理,使最终的点云数据被分类为地形点云、高压线点云、高压线塔点云和其他障碍物点云,为三维增强现实符号生成提供可靠数据源。本发明结合三维符号显示可以帮助飞行员在低空飞行和进近着陆阶段获得三维可视化态势感知能力。
2、一种用于直升机辅助导航的点云数据处理方法,其特征在于步骤如下:
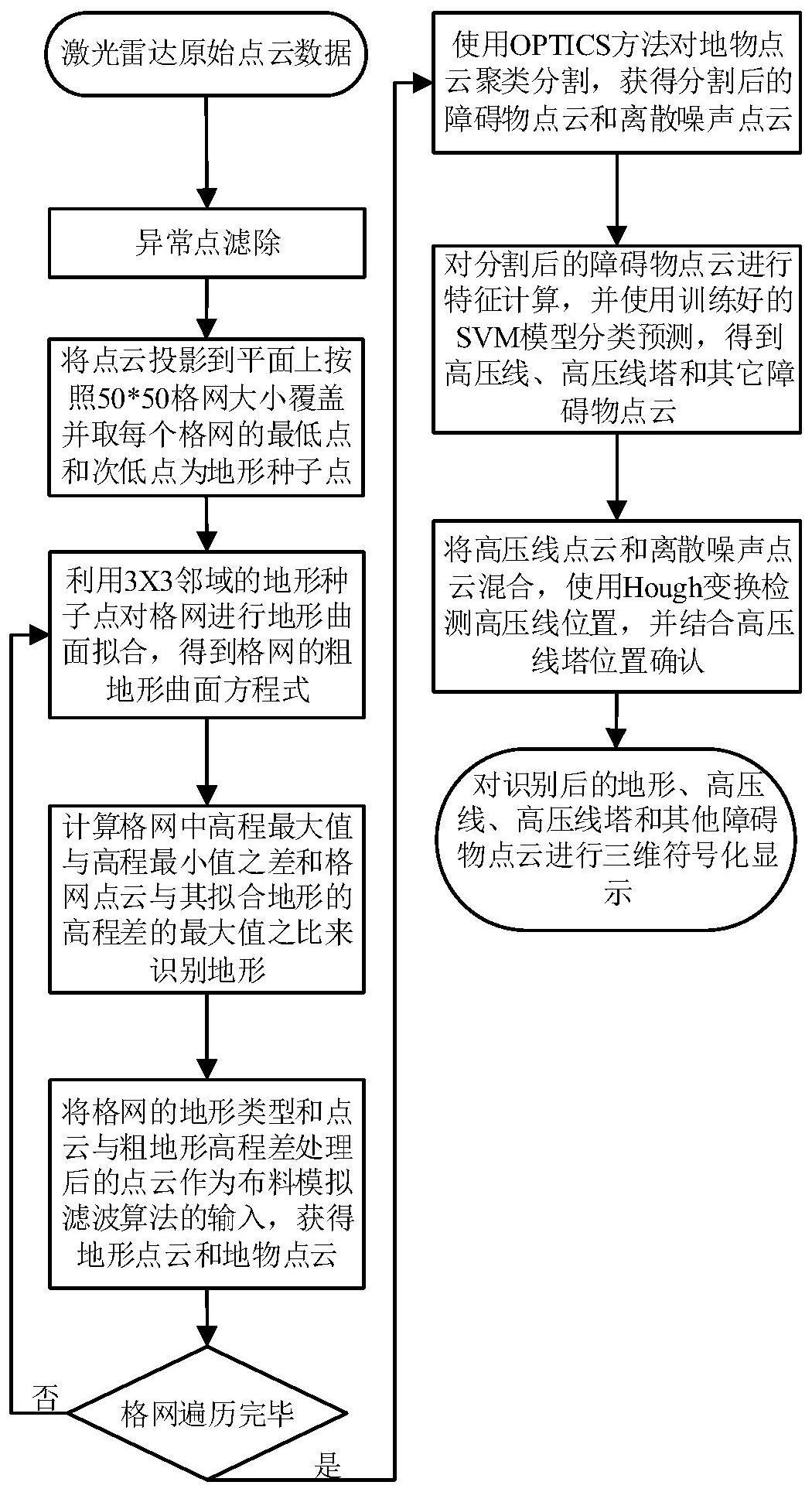
3、步骤1:利用激光雷达获取点云数据信息,包含点云数据的三维坐标及强度信息;
4、步骤2:采用k最邻近异常点滤除算法,通过计算点到其k近邻点的高程距离平均值,对获取到的点云数据进行异常点滤除;
5、步骤3:将滤除后的点云投影到平面上并采用指定大小的格网进行覆盖,对每个格网进行编号,取每个格网的最低点和次低点作为地形种子点;
6、步骤4:利用各格网及其3x3邻域内的地形种子点进行二次曲面拟合,得到各格网的粗略地形曲面方程式;
7、步骤5:计算每个格网中高程最大值与高程最小值之差a,和该格网点云高程值与其对应的粗略地形拟合高程值的最大差值b,如果a/b的值大于65%,标记该格网地形类型为平坦,如果a/b的值在30%~65%之间,标记该格网地形类型为有起伏,如果a/b的值小于30%,标记该格网地形类型为陡峭;
8、步骤6:将各个格网计算的地形类型作为布料模拟滤波算法的地形参数,以各格网点云与其对应的粗略地形高程差作为布料初始状态,采用布料模拟滤波算法进行地形和地物点云分割,其中,将最终迭代得到的布料邻近点作为地形点云,布料远离点作为地物点云;
9、步骤7:使用基于密度的optics聚类方法对分割后的地物点云进行聚类处理,将地物点云进一步划分为障碍物点云和包含高压线的离散噪声点云;
10、步骤8:将障碍物点云的形态、高度、离散度、面积、高程差特征输入svm分类器,将障碍物点云进一步划分为高压线、高压线塔和其它障碍物点云;其中,svm分类器事先由数据集进行训练得到;
11、步骤9:将步骤7中包含高压线的离散噪声点云和步骤8中识别出的高压线点云混合,采用hough变换对混合后的点云进行直线检测,得到高压线位置,并按照高压线与高压线塔相邻且相连的原则,结合步骤8得到的高压线塔位置,确定得到最终的高压线点云;
12、步骤10:对地形点云、高压线点云、高压线塔点云和其它障碍物点云分别进行三维符号化显示。
13、进一步地,将三维符号化显示结果与采集的可见光或红外图像叠加,得到纹理信息和点云信息互补的态势图像。
14、本发明的有益效果是:
15、(1)由于在地形点云分割过程中增加了地形判断处理过程,能够对不同地形实现参数的自适应调整,获得了复杂连续地形下准确的地物点云和地形点云;
16、(2)由于在地形分割过程中将各格网点云与其拟合地形高程差作为布料初始状态和并行处理的方法,提高了分割过程的运算效率,提高了算法的实时性;
17、(3)由于在高压线检测的过程中综合考虑了密集高压线点云、离散高压线点云和高压线及高压线塔的相对位置关系,获得了更加准确的高压线识别效果;
18、(4)由于在点云数据处理方法中增加了障碍物三维符号化处理过程,能够将符号化信息与可见光/红外采集的图像叠加,获得更加直观、高效的感知能力。
19、(5)本发明采用了基于布料模拟滤波的点云地形自适应分割,并结合svm和hough变换等进行地物点云识别,能够获得较高的准确率和实时性,且地形自适应性强;同时依据处理后的三维数据源,可实时生成三维增强现实符号与可见光/红外采集的图像叠加,提供直观高效的感知能力,具有很高的实用价值。
技术特征:
1.一种用于直升机辅助导航的点云数据处理方法,其特征在于步骤如下:
2.如权利要求1所述的一种用于直升机辅助导航的点云数据处理方法,其特征在于:将三维符号化显示结果与采集的可见光或红外图像叠加,得到纹理信息和点云信息互补的态势图像。
技术总结
本发明提供了一种用于直升机辅助导航的点云数据处理方法。通过基于布料模拟滤波的点云地形自适应分割、结合SVM和Hough变换的地物点云识别等步骤,对激光雷达点云数据实时、自适应处理,使最终的点云数据被分类为地形点云、高压线点云、高压线塔点云和其他障碍物点云,为三维增强现实符号生成提供可靠数据源。本发明结合三维符号显示可以帮助飞行员在低空飞行和进近着陆阶段获得三维可视化态势感知能力。
技术研发人员:刘凯,武晓军,王晓龙,李俊杰
受保护的技术使用者:中国航空工业集团公司洛阳电光设备研究所
技术研发日:
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!