用于同时进行坐标跟踪测量与高精度准直姿态测量的仪器的制作方法
1.本发明属于测量装置技术领域,具体涉及一种同时提供坐标跟踪测量与高精度准直姿态测量的仪器。
背景技术:
2.大型零部件装配对接、空间探测器载荷装配、无人机高精度定位、机器人校准等制造、检验、空间定位过程中均需要手段进行空间位置和姿态的六维测量。目前适用于大尺寸范围内同时进行空间位置与姿态测量的方法有五种:
3.第一种是多站多点空间坐标法,该方法采用便捷式单点坐标测量系统测量固定安装在被测目标上不同位置的合作目标点,获取该系列合作目标点的空间坐标值,再通过多点坐标匹配计算实现被测目标测量点的位置和姿态角,便捷式单点坐标测量系统典型代表仪器有关节臂式柔性三坐标测量系统、激光跟踪仪球坐标测量系统、电子经纬仪坐标测量系统,便携式光笔坐标测量系统四种。此种方法的优点是便捷式单点坐标测量系统空间坐标测量精度高,通过分别测量在被测目标上不同位置的合作目标点可获取较高的姿态测量精度,姿态测量误差可控制在
±
0.01
°
;缺点是便捷式单点坐标测量系统每次只能测量一个点,需要多套测量系统同步测量才能实现位置与姿态的实时测量,或采取单站分别测量合作目标点进行静态解算获取位置与姿态,该种方法目前主要应用在飞机大部件对接、飞控作动部件姿态角度校准等领域,但该方案姿态测量通过坐标进行转化,需要更大的测量面方可达到姿态测量的目标,姿态测量误差难以进一步降低,在此外该方案不能针对建立在镜面上的矢量基准开展高精度的姿态测量工作。
4.第二种是单站多点空间坐标法,该方法采用便捷影像式多点坐标测量系统同时测量固定安装在被测目标上不同位置的合作目标点,获取该系列合作目标点的空间坐标,再通过同时获取的多点坐标匹配计算,实现被测目标测量点的位置和姿态角的测量。便捷式多点坐标测量系统典型代表仪器有单目视觉测量系统、双目视觉测量系统等。此种方法的优点是能够通过测量系统一次性获取多个合作目标点的空间坐标,可实现实时的空间位置与姿态测量;缺点是受摄影测量系统测量原理限制,空间坐标测量精度较低,小范围内空间姿态测量误差方能低于
±
0.05
°
,该种方法主要应用于空间目标的姿态定位及全场测量网的控制,姿态测量精度较低,同样该方案不能针对建立在镜面上的矢量基准开展高精度的姿态测量工作。
5.第三种是复合空间位置姿态测量法,该方法包括两种方案,一种方案为利用便捷式单点坐标测量系统进行空间单点的实时高精度的坐标测量,再结合便捷影像式多点坐标测量系统实现多点的同步姿态测量,达到了基于合作目标的空间位置姿态实时高精度测量目的,典型系统为激光跟踪仪结合t-mac 6d组成的激光跟踪动态位姿测量系统,其典型应用是机器人的校准见cn109591019b一种无确定性定位特征物体的空间精确定位方法,cn111633687a一种工业机器人末端抖动参数检测系统及方法等。另一种方案则采用便捷式单点坐标测量系统进行空间单点的实时高精度的位置测量,结合测角及惯导器件实现三维
姿态的测量,同样达到基于合作目标的空间位置姿态实时高精度测量目的,典型系统为美国api激光跟踪仪(美国专利us20170370700a1具有360
°
角度工作范围的多维测量系统)结合sts六维智能传感器组成的激光跟踪动态位姿测量系统。以上复合空间位置姿态测量法目前测量半径可达到30m,空间坐标点测量误差
±
(15μm+6μm/m),姿态测量误差
±
0.01
°
。缺点是难以实现对建立在镜面上的矢量基准开展高精度的姿态测量工作,姿态测量精度难以进一步提高。
6.第四种是惯性器件测量法,该方法利用捷联惯导器件采用积分方法获取空间位置,通过感应重力及加速度获取姿态,具有测量速率高、独立运行的特点,但是由于其采用积分法获取空间位置,因此空间位置精度测量较低,此外为了达到较高的空间位置及姿态测量精度,捷联惯导系统需要复杂的结构来保证,可靠性较低、故障间隔时间较短、造价较高,目前主要用于导弹导航、飞机控制等远程制导及姿态控制等领域。
7.第五种是基于准直与瞄准法结合的位置与姿态测量方法,该方法主要利用准直法实现姿态测量,通过光学瞄准或激光法实现二维位移的测量,而由于二维准直测量仪只能进行两个姿态的测量,因此可采用两个准直测量仪通过同时准直测量相邻垂直的立方镜面实现高精度的姿态测量,典型应用为基于双经纬的人工瞄准测量方案实现空间探测器载荷装配时的姿态测量,该方案是被测探测器固定不动,利用两台经纬仪分别准直被测空间探测器上不同载荷上的基准立方镜的镜面,然后通过人工互瞄的方案建立起不同载荷之间的姿态关系。该方案载荷姿态角的获取是基于电子经纬仪与基准镜准直的基础上再通过人工互瞄准来获取测量经纬仪与地面经纬仪的水平角及俯仰角度来实现的,因此需要测量的每个载荷位置均需要人工架设经纬仪进行准直测量,并且由于空间探测器结构复杂、载荷布设位置多样化,因此该方案存在人工测量难度高、效率低,测量精度容易受到外界因素的影响等问题。此外,专利cn111879496a公开的一种用于风洞天平加载头高精度实时复位测量的装置就是采用了此种方法,但该种方法测量范围小一般姿态测量范围小于0.1
°
,位移测量范围一般小于5mm,因此适用性不足,主要应用在需要准直测量的风洞天平姿态测量领域。
技术实现要素:
8.本发明的目的是提供一种用于同时进行坐标跟踪测量与高精度准直姿态测量的仪器,利用测距组件和二维跟踪测角组件构成球坐标测量系统实现合作目标大空间范围内的坐标跟踪测量;利用集成在集成光学组件中的指示光结合变焦准直测量组件和测距组件可同步实现带有平面基准镜合作目标准直姿态的自动测量,以解决空间探测器载荷制造过程中载荷姿态的自动准直测量难题;利用自适应准直目标组件,实现回光方向的自适应调整,并基于准直法可实现安装有自适应准直目标的被测件的高精度空间位置和姿态的高精度测量,满足机器人位置姿态校准、大型零部件装配对接位置姿态测量需求。
9.本发明的目的是通过下述技术方案实现的。
10.本发明公开的用于同时进行坐标跟踪测量与高精度准直姿态测量的仪器,主要由二维跟踪测角组件、集成光学组件、自动变焦准直组件、测距组件和集成式控制测量组件组成。
11.所述二维跟踪测角组件是本发明结构件的主体,其用于安装反射平面镜,实现反
射平面镜高精度的水平回转与测量及俯仰回转与测量,测距激光经平面镜回转中心反射后提供获取测距光的水平角、俯仰角和测距信息;其上同时安装有透反镜,能够将集成光学组件中的测距激光、跟踪指示激光、准直指示光,自动变焦准直组件中的光学中心轴线汇聚到一起,经反射镜反射后到达被测合作目标组件,经被测合作目标组件反射后原路返回集成光学组件、自动变焦准直组件内,经集成式控制测量组件处获取结合水平角、俯仰角、测距组件的测距信息,实现被测合作目标的空间坐标或姿态的高精度测量;所述集成光学组件主要用于将测距激光、跟踪指示激光、准直指示光汇聚调整到同光路上,实现光路的汇合,同时通过模块化组装便于安装与整体的调整;所述自动变焦准直组件用于根据测距组件测得的与合作目标的距离信息实现自动的变焦,进而能够获取合作目标反射的准直指示光的清晰图像信息,通过中心点解算结合测距信息即实现高精度姿态测量;所述测距组件用于实现合作目标点的距离测量,为跟踪、准直姿态解算提供实时的距离测量信息;所述集成式控制测量组件用于实现二维跟踪测角组件二维角度的运动控制和实时的水平角、俯仰角反馈测量与输出,同时用于实现测距组件的测距信息获取与输出,准直指示光的中心点的提取处理,实现的空间位置与姿态的测量。
12.作为优选,所述二维跟踪测角组件包括圆光栅读数头、俯仰角测量圆光栅、俯仰轴左精密轴承、俯仰轴配重、平面反射镜、俯仰轴、俯仰轴座、倾角传感器、俯仰轴右精密轴承、俯仰轴直驱力矩电机、俯仰直驱力矩电机安装座、保护罩、主透反镜、水平旋转轴上精密轴承、线缆保护罩、环形把手、下精密轴承、轴承锁紧螺纹、密珠轴承、水平旋转轴直驱力矩电机、把手安装座、水平角测量圆光栅、水平旋转轴安装座及水平旋转轴。俯仰角测量圆光栅安装在俯仰轴上,与读数头配合实现高精度的俯仰角的测量;俯仰轴左精密轴承安装在俯仰轴的左侧后,穿过俯仰轴的轴承安装孔再安装俯仰轴右精密轴承,俯仰轴通过俯仰轴左精密轴承和俯仰轴右精密轴承实现精密的回转导向;俯仰轴通过安装在其右端的直驱力矩电机实现俯仰轴的驱动;俯仰轴直驱力矩电机则通过直驱力矩电机安装座安装在俯仰轴座上;倾角传感器安装在俯仰轴座的顶部用于实现仪器的调平及补偿;水平旋转轴通过水平旋转轴上精密轴承和下精密轴承安装在水平旋转轴安装座上,水平旋转轴的角度通过水平角测量圆光栅测得;其驱动由水平旋转轴直驱力矩电机提供;平面反射镜安装在带俯仰轴上,其反射面居在俯仰轴的中心与水平轴的中心位置,其在俯仰轴直驱力矩电机和水平旋转轴直驱力矩电机驱动下实现俯仰及水平角度的旋转,并通过水平角测量圆光栅和俯仰角测量圆光栅实现俯仰及水平角的精密测量;环形把手通过两侧安装的安装把手安装座与水平旋转轴安装座连接,通过安装把手安装座的缓冲可有效防止环形把手搬运用力过大引起的水平旋转轴安装座的变形,主透反镜安装在俯仰轴座的中空框架内部的底部,用于将安装在俯仰轴座左侧的集成光学组件发射的测距激光、跟踪指示激光、准直指示光,以及安装在水平旋转轴中间的自动变焦准直组件中的光学中心轴线汇聚到一起,经反射镜反射后到达被测合作目标组件,保护罩安装在俯仰轴安装座的左右侧用于包括其上安装的零部件,线缆保护罩安装在水平旋转轴安装座的顶部用于实现内部走线线缆的保护。
13.作为优选,所述集成光学组件包括准直光激光器、准直激光衍射小透镜、衍射反射镜、激光位移感应传感器、激光位移感应传感器安装座、镜组安装座、激光透镜安装座、激光准直透镜、滤光片、平面透反镜、加层反射镜、透反镜反射镜安装座、反射镜、衍射测距汇聚透反镜、测距激光光纤准直镜、衍射大透镜及衍射大透镜安装座。准直光激光器通过准直光
激光器安装座安装在镜组安装座上,同时其上还安装有准直激光衍射小透镜用于与安装在衍射大透镜安装座上的衍射大透镜配合产生基于衍射原理的环形准直激光;环形准直激光通过衍射测距汇聚透反镜与测距激光光纤准直镜发射的测距激光汇合,再经反射镜反射后进入到平面透反镜内,平面透反镜安装在透反镜反射镜安装座上,并呈45
°
安装,汇聚光经平面透反镜反射后进入到安装在二维跟踪测角组件上的主透反镜上,再经主透反镜的反射进入的平面反射镜反射进入到合作目标上,合作目标的光经过原路返回后经过平面透反镜后经加层反射镜的反射分别经滤光片、激光准直透镜准直后打到安装在激光位移感应传感器安装座上的激光位移感应传感器上,经过信号处理后结合二维跟踪测角组件测量的水平角及俯仰角的值,经过集成式控制测量组件的处理实现二维跟踪测角组件的跟踪控制;测距光经过原路返回后到达测距激光光纤准直镜,进入光纤后到达激光探测器面实现并经集成式控制测量组件的处理实现合作目标的距离测量。
14.作为优选,所述自动变焦准直组件包括准直图像获取相机、变焦安装座、变焦镜组、调焦电机及反射镜,变焦镜组集成安装在变焦镜组筒内,其光学中心与变焦镜组筒的外部轴的机械中心经调整后严格同轴,变焦镜组筒再安装到水平旋转轴内,其通过上、下精密珠轴承的配合实现变焦镜组的光学中心与旋转轴的旋转轴心同轴;变焦镜组通过变焦电机驱动齿轮带动齿条的方式实现变焦,变焦的反馈采用基于测距的反馈实现自动的变焦,达到准直像自动获取的目标。
15.作为优选,所述测距组件集成安装在集成式控制测量组件的控制箱内,所述测距组件包括测量光纤、测量干涉光纤、平衡探测器a、平衡探测器b、参考光纤、外调频激光器、外调频激光器调频控制与测距处理电路、测距激光光纤准直镜,主要实现绝对距离的测量;
16.作为优选,所述集成式控制测量组件包括控制箱上盖板、图像处理电路、图处理电路安装板、集成式运动控制电路、集成式控制电路安装板、双读数头处理器、运动驱动器、接头安装板、控制箱体及控制箱下连接板。图像处理电路用于实现准直图像的实时处理以获取准直图像的中心点位置,准直图像处理电路通过图处理电路安装板安装在控制箱上盖板上;集成式运动控制电路通过集成式控制电路安装板安装在控制箱上盖板上,其主要通过控制三个运动驱动器实现俯仰轴直驱力矩电机、水平旋转轴直驱力矩电机、调焦电机的控制,控制箱体安装在控制箱上盖板和控制箱下连接板之间,起到保护控制器件及支撑的作用。
17.作为优选,所述水平旋转轴安装座采用侧面镂空结构,用于实现水平旋转轴直驱力矩电机与水平角测量圆光栅置安装在上下精密轴承中间,增加驱动的稳定性和测量的精度;同时为水平旋转轴中间安装自动变焦准直组件提供空间。
18.本发明公开的用于同时进行坐标跟踪测量与高精度准直姿态测量的仪器的工作方法为:
19.将本发明的仪器安装并固定在支撑架上,调整支撑架高度及位置,使得被测件安装合作目标后运动范围内均具备可视化的条件,之后打开机器,连接上位机。当被测件需要进行大范围的空间位置及姿态测量时,通过跟踪准直目标满足大范围的空间位置及姿态测量要求,打开跟踪准直测量目标,此时耦合在测距激光中的指示激光通过测距激光光纤准直镜进入到衍射测距汇聚透反镜内,再经过反射镜的反射到达平面透反镜内,平面透反镜成45
°
安装在透反镜反射镜安装座上,经过反射后指示测距激光沿着镜组安装座的法向方
向进入到安装在俯仰轴座的中空框架内部的底部的主透反镜,经过主透反镜的反射进入反射镜,再经过反射镜的反射及水平角及俯仰角的调整实现宽范围的球坐标的测量,通过调整反射镜的角度以及自适应目标的平面镜角锥镜,使得集成光学组件发射出的指示激光打到准直跟踪目标的平面角锥镜上,后准直跟踪准直目标能够根据来的激光调整自身的水平角及俯仰角角度实现光路的原路返回,再经过反射镜的反射进入主透反镜,经过主透反镜反射进入到平面透反镜,此时返回的激光被分成两路,一路经过平面透反镜的投射进入到加层反射镜,并经过加层反射镜的反射进入到滤光片后滤掉测距激光,再经过激光准直透镜准直后打到激光位移感应传感器psd,激光位移感应传感器psd感应到指示激光的位移量如果偏移为零则不进行调整,如果偏移量不为零,则会给出位移量,并输入到集成式运动控制电路中,其产生控制信号到达电机运动驱动器,控制所述二维跟踪测角组件中的俯仰轴直驱力矩电机、水平旋转轴直驱力矩电机分别驱动俯仰轴和水平旋转轴,进而带动安装俯仰轴上的平面反射镜调整角度,直到激光位移感应传感器psd感应到指示激光的位移量小于控制限制量为止,此时指示激光则会打在跟踪准直测量目标角锥反射镜的角锥中心上。而另一路指示测距经过平面透反镜的反射后再经反射镜的反射、衍射测距汇聚透反镜的投射进入到测距激光光纤准直镜,再经过光纤的传输到达测距组件实现绝对距离测量,获取跟踪准直目标角锥点的距离,同时测得反射镜的水平和俯仰旋转的角度则能够利用球坐标公式实现跟踪准直目标的空间坐标测量。
20.跟踪准直测量目标与本发明的仪器连接并获取空间坐标测量后可实现跟踪测量,即跟踪准直测量目标安装在被测件上后,被测件移动后其能根据来光方向在进行自动的平面角锥镜的调整进而实现空间跟踪测量。当需要进行空间姿态测量时,打开安装在集成光学组件上的准直光激光器,其发射的光经过准直激光衍射小透、衍射大透镜后在衍射测距汇聚透反镜处与指示测距激光汇合,再经再经过反射镜的反射到达平面透反镜内,平面透反镜成45
°
安装在透反镜反射镜安装座上,经过反射后指示测距激光沿着镜组安装座的法向方向进入到安装在俯仰轴座的中空框架内部的底部的主透反镜,经过主透反镜的反射进入反射镜,到达自适应准直目标的平面角锥镜上,经过平面角锥镜上的平面部分反射镜的反射后,衍射激光进入到反射镜到到达主透反镜,并经主透反镜投射进入到自动变焦准直组件的变焦镜组,变焦镜组在调焦电机的驱动下,在测距激光的反馈下实现实时的自动变焦,进入能够在准直图像相机上成清晰的准直光的像,再经过集成式控制测量组件中的图像处理电路的实时处理获取中衍射光的中心点位置结合测距激光及水平角测角、俯仰角测角信息即能够实现静止平面角锥镜的姿态测量,当采用跟踪准直测量目标时,平面角锥镜能够自适应的角度调整,调整后能够获取自适应调整的角度再结合跟踪准直测量目标上安装的高精度倾角传感器即能够实现安装有跟踪准直测量目标的被测件的高精度的姿态测量,基于准直测量减小姿态角的误差,进而提升大尺寸测量范围内空间位置姿态尤其是姿态角的测量精度。
21.所述测量范围指尺寸在1m以上。
22.作为优选,所述准直目标用于感应跟踪准直测量仪发射的方向,并进行二维的水平旋转及俯仰旋转的调整,使得其上安装的基准平面角锥平面镜能够将入射的激光原路返回,同时高精度的测量水平及俯仰的旋转角度,进而为跟踪准直测量仪的提供姿态角的基准。
23.有益效果:
24.1、本发明公开的用于同时进行坐标跟踪测量与高精度准直姿态测量的仪器,配合跟踪准直测量目标可实现被测件空间位置和姿态的同步测量,可为大型零部件装配对接、机器人校准提供集成化的位置及姿态测量手段,与现有大尺寸测量仪器比较,实现了跟踪坐标与准直姿态测量的融合,增加了基于准直法的姿态测量功能,实现了一机多用,拓展了适用范围。
25.2、本发明公开的用于同时进行坐标跟踪测量与高精度准直姿态测量的仪器,基于平面角锥镜目标的姿态测量是基于准直法的测量,因此能够大幅提升准直测量的精度,此外基于衍射光的自动准直测量可有效解决平面镜准直测量的高精度准直自动瞄准问题,能够为空间探测器载荷装配测量提供自动化的瞄准手段。
26.3、本发明公开的用于同时进行坐标跟踪测量与高精度准直姿态测量的仪器,将跟踪准直测量目标固定,作为参考目标,而本发明仪器移动,通过实时的位置和准直姿态的测量可获取与准直测量目标的相对位置姿态关系,进而在通过本发明仪器的自动准直功能实现固定基准镜的法向测量,并将综合测量误差控制在
±5″
以内,有效解决空间探测器载荷、风洞天平加载头的自动化高精度姿态测量难题。
27.4、本发明公开的用于同时进行坐标跟踪测量与高精度准直姿态测量的仪器,配合跟踪准直测量目标可实现被测目标的动态空间坐标测量,测量速度可达到4m/s,同时跟踪准直测量目标可实现自适应的调整,可有效扩大测量的范围,测量范围可达到俯仰角
±
45
°
,水平角
±
180
°
,可为无人机高精度定位等需要实时定位的目标提供空间定位测量手段。
附图说明
28.下面结合附图和实施例对本发明进一步说明:
29.图1为本发明的一种同时适用于坐标跟踪测量与高精度准直姿态测量的仪器总体构成图;
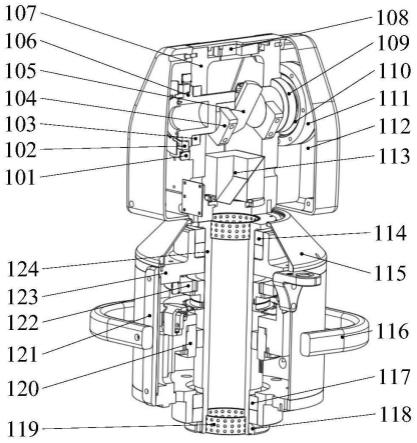
30.图2为本发明的二维跟踪测角组件的结构示意图;
31.图3为本发明的集成光学组件的结构示意图;
32.图4为本发明的自动变焦准直组件的结构示意图;
33.图5为本发明的测距组件和集成式控制测量组件的结构示意图;
34.图6为本发明与跟踪准直测量目标工作效果图。
35.图中:1-二维跟踪测角组件、2-集成光学组件、3-自动变焦准直组件、4-测距组件、5-集成式控制测量组件、6-跟踪准直目标、7-专用支撑架、101-圆光栅读数头、102-俯仰角测量圆光栅、103-俯仰轴左精密轴承、104-俯仰轴配重、105-平面反射镜、106-俯仰轴、107-俯仰轴座、108-倾角传感器、109-俯仰轴右精密轴承、110-俯仰轴直驱力矩电机、111-俯仰直驱力矩电机安装座、112-保护罩、113-主透反镜、114-水平旋转轴上精密轴承、115-线缆保护罩、116-环形把手、117-下精密轴承、118-轴承锁紧螺纹、119-密珠轴承、120-水平旋转轴直驱力矩电机、121-把手安装座、122-水平角测量圆光栅、123-水平旋转轴安装座、124-水平旋转轴、201-准直光激光器、202-准直激光衍射小透镜、203-衍射反射镜、204-激光位移感应传感器、205-激光位移感应传感器安装座、206-镜组安装座、207-激光透镜安装座、
208-激光准直透镜、209-滤光片、210-平面透反镜、211-加层反射镜、212-透反镜反射镜安装座、213-反射镜、214-衍射测距汇聚透反镜、215-测距激光光纤准直镜、216-衍射大透镜、217-衍射大透镜安装座、301-准直图像获取相机、302-变焦安装座、303-变焦镜组、304-调焦电机、305-反射镜401-测量光纤、402-测量干涉光纤、403-平衡探测器a、404-平衡探测器b、405-参考光纤、406-外调频激光器、407-外调频激光器调频控制与测距处理电路、408-测距激光光纤准直镜、501-控制箱上盖板、502-图像处理电路、503-图处理电路安装板、504-集成式运动控制电路、505-集成式控制电路安装板、506-双读数头处理器、507-运动驱动器、508-接头安装板、509-控制箱体、510-控制箱下连接板。
具体实施方式
36.下面将结合本技术实施例对本技术的技术方案进行清楚、完整地描述,显然,所描述的实施例是本技术一部分实施例,而不是全部的实施例。基于本技术中的实施例,本领域技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本技术保护的范围。
37.参见附图1所示,本实施例公开的用于同时进行坐标跟踪测量与高精度准直姿态测量的仪器包括二维跟踪测角组件1、集成光学组件2、自动变焦准直组件3、测距组件4及集成式控制测量组件5。
38.二维跟踪测角组件1是本发明结构件的主体,其用于安装反射平面镜,实现反射平面镜高精度的水平回转与测量及俯仰回转与测量,测距激光经平面镜回转中心反射后提供获取测距光的水平角、俯仰角和测距信息;其上同时安装有透反镜,能够将集成光学组件2中的测距激光、跟踪指示激光、准直指示光,自动变焦准直组件3中的光学中心轴线汇聚到一起,经反射镜反射后到达被测合作目标组件,经被测合作目标组件反射后原路返回集成光学组件2、自动变焦准直组件3内,经集成式控制测量组件5处获取结合水平角、俯仰角、测距组件4的测距信息,实现被测合作目标的空间坐标或姿态的高精度测量。集成光学组件2主要用于将测距激光、跟踪指示激光、准直指示光汇聚调整到同光路上,实现光路的汇合,同时通过模块化组装便于安装与整体的调整。自动变焦准直组件3用于根据测距组件4测得的与合作目标的距离信息实现自动的变焦,进而能够获取合作目标反射的准直指示光的清晰图像信息,通过中心点解算结合测距信息即实现高精度姿态测量。测距组件4用于实现合作目标点的距离测量,为跟踪、准直姿态解算提供实时的距离测量信息。集成式控制测量组件5用于实现二维跟踪测角组件1二维角度的运动控制和实时的水平角、俯仰角反馈测量与输出,同时用于实现测距组件4的测距信息获取与输出,准直指示光的中心点的提取处理,最终实现目标的空间位置与姿态的测量。
39.参见附图2所示,二维跟踪测角组件1包括圆光栅读数头101、俯仰角测量圆光栅102、俯仰轴左精密轴承103、俯仰轴配重104、平面反射镜105、俯仰轴106、俯仰轴座107、倾角传感器108、俯仰轴右精密轴承109、俯仰轴直驱力矩电机110、俯仰直驱力矩电机安装座111、保护罩112、主透反镜113、水平旋转轴上精密轴承114、线缆保护罩115、环形把手116、下精密轴承117、轴承锁紧螺纹118、密珠轴承119、水平旋转轴直驱力矩电机120、把手安装座121、水平角测量圆光栅122、水平旋转轴安装座123、及水平旋转轴124。俯仰角测量圆光栅102安装在俯仰轴上,与读数头配合实现高精度的俯仰角的测量;俯仰轴左精密轴承103
安装在俯仰轴的左侧后,穿过俯仰轴的轴承安装孔再安装俯仰轴右精密轴承109,俯仰轴通过俯仰轴左精密轴承103和俯仰轴右精密轴承109实现精密的回转导向;俯仰轴通过安装在其右端的直驱力矩电机实现俯仰轴的驱动;俯仰轴直驱力矩电机110则通过直驱力矩电机安装座安装在俯仰轴座107上;倾角传感器108安装在俯仰轴座107的顶部用于实现仪器的调平及补偿;水平旋转轴通过水平旋转轴上精密轴承和下精密轴承安装在水平旋转轴安装座上,水平旋转轴的角度通过水平角测量圆光栅测得;其驱动由水平旋转轴直驱力矩电机提供;平面反射镜105安装在带俯仰轴上,其反射面居在俯仰轴的中心与水平轴的中心位置,其在俯仰轴直驱力矩电机110和水平旋转轴直驱力矩电机驱动下实现俯仰及水平角度的旋转,并通过水平角测量圆光栅和俯仰角测量圆光栅102实现俯仰及水平角的精密测量;环形把手通过两侧安装的把手安装座与水平旋转轴安装座连接,通过安装把手安装座的缓冲可有效防止环形把手搬运用力过大引起的水平旋转轴安装座的变形,主透反镜安装在俯仰轴座107的中空框架内部的底部,用于将安装在俯仰轴座107左侧的集成光学组件2发射的测距激光、跟踪指示激光、准直指示光,以及安装在水平旋转轴中间的自动变焦准直组件3中的光学中心轴线汇聚到一起,经反射镜反射后到达被测合作目标组件,保护罩安装在俯仰轴安装座的左右侧用于包括其上安装的零部件,线缆保护罩安装在水平旋转轴安装座的顶部用于实现内部走线线缆的保护。
40.参见附图3所示,集成光学组件2包括准直光激光器201、准直激光衍射小透镜202、衍射反射镜203、激光位移感应传感器204、激光位移感应传感器安装座205、镜组安装座206、激光透镜安装座207、激光准直透镜208、滤光片209、平面透反镜210、加层反射镜211、透反镜反射镜安装座212、反射镜213、衍射测距汇聚透反镜214、测距激光光纤准直镜215、衍射大透镜216及衍射大透镜安装座217。准直光激光器通过准直光激光器安装座安装在镜组安装座上,同时其上还安装有准直激光衍射小透镜用于与安装在衍射大透镜安装座上的衍射大透镜配合产生基于衍射原理的环形准直激光;环形准直激光通过衍射测距汇聚透反镜与测距激光光纤准直镜发射的测距激光汇合,再经反射镜反射后进入到平面透反镜内,平面透反镜安装在透反镜反射镜安装座上,并成45
°
安装,汇聚光经平面透反镜反射后进入到安装在二维跟踪测角组件1上的主透反镜上,再经主透反镜的反射进入的平面反射镜105反射进入到合作目标上,合作目标的光经过原路返回后经过平面透反镜后经加层反射镜的反射分别经滤光片、激光准直透镜准直后打到安装在激光位移感应传感器安装座上的激光位移感应传感器上,经过信号处理后结合二维跟踪测角组件1测量的水平角及俯仰角的值,经过集成式控制测量组件5的处理实现二维跟踪测角组件1的跟踪控制;测距光经过原路返回后到达测距激光光纤准直镜,进入光纤后到达激光探测器面实现并经集成式控制测量组件5的处理实现合作目标的距离测量。
41.参见附图4所示,自动变焦准直组件3包括准直图像获取相机301、变焦安装座302、变焦镜组303、调焦电机304及反射镜305,变焦镜组集成安装在变焦镜组筒内,其光学中心与变焦镜组筒的外部轴的机械中心经调整后严格同轴,变焦镜组筒再安装到水平旋转轴内,其通过上、下精密珠轴承的配合实现变焦镜组的光学中心与旋转轴的旋转轴心同轴;变焦镜组通过变焦电机驱动齿轮带动齿条的方式实现变焦,变焦的反馈采用基于测距的反馈实现自动的变焦,达到准直像自动获取的目标。
42.参见附图5所示,测距组件4集成安装在集成式控制测量组件5的控制箱内,测距组
件4包括测量光纤401、测量干涉光纤402、平衡探测器a403、平衡探测器b404、参考光纤405、外调频激光器406、外调频激光器调频控制与测距处理电路407及测距激光光纤准直镜408,主要实现绝对距离的测量。
43.集成式控制测量组件5包括控制箱上盖板501、图像处理电路502、图处理电路安装板503、集成式运动控制电路504、集成式控制电路安装板505、双读数头处理器506、运动驱动器507、接头安装板508、控制箱体509及控制箱下连接板510。图像处理电路用于实现准直图像的实时处理以获取准直图像的中心点位置,准直图像处理电路通过图处理电路安装板安装在控制箱上盖板上;集成式运动控制电路通过集成式控制电路安装板安装在控制箱上盖板上,其主要通过控制三个运动驱动器实现俯仰轴直驱力矩电机110、水平旋转轴直驱力矩电机、调焦电机的控制,控制箱体安装在控制箱上盖板和控制箱下连接板之间,起到保护控制器件及支撑的作用。
44.二维跟踪测角组件1中用于俯仰轴精密回转导向的俯仰轴左精密轴承103和俯仰轴右精密轴承109及用于水平旋转轴回转导向的水平旋转轴上精密轴承和下精密轴承均采用精密角接触轴承,以是水平轴及俯仰轴的预紧,提升旋转轴支撑安装刚度及回转精度。
45.二维跟踪测角组件1中用于水平测量的倾角传感器108采用二维高精度倾角传感器108,以方便调平时的监控提升调平效率。
46.二维跟踪测角组件1中的水平旋转轴安装座采用侧面镂空结构,可实现水平旋转轴直驱力矩电机与水平角测量圆光栅置中安装在上下精密轴承中间,增加了驱动的稳定性和测量的精度,同时为水平旋转轴中间安装自动变焦准直组件3提供空间。
47.二维跟踪测角组件1中的俯仰角测量圆光栅102和水平角测量圆光栅均配备双读数头,以方便实现偏心补偿提高测角精度。
48.二维跟踪测角组件1中用于安装平面反射精度俯仰轴采用一体轴结构中间凹型结构,同时采用俯仰轴配重104实现自身的俯仰旋转平衡。
49.集成光学组件2中的透反镜反射镜安装座采用上下两层设计,分别实现透反镜和反射镜的安装,通过双层设计节省安装空间。
50.集成光学组件2中的透反镜反射镜安装座上安装的透反镜采用平面透反镜,以降低采用立体透反镜带来的反光对激光位移感应传感器的影响,提升激光跟踪效果。
51.集成光学组件2中的透反镜反射镜安装座采用前螺纹后销结构与镜组安装座连接,方便调整透反镜与激光位移感应传感器距离,获取优化的测量位置。
52.准直光激光器、测距激光光纤准直镜均采用光纤与激光器连接,激光器安装在集成式控制测量组件5内,减少俯仰轴座107上安装的光学器件同时减少俯仰轴安装座的发热量。
53.自动变焦准直组件3采用的自动变焦方法为基于测距的实时变焦,减少因基于图像清晰度变焦时的处理时间,提升变焦效率。
54.测距组件4采用的基于激光扫频的绝对激光测距原理测距器件,方便实现任意位置合作目标的空间位置的测量。
55.测距组件4采用的,外调频激光器调频控制与测距处理电路能够同时实现外调频激光器调频控制及测距信号的处理,实现绝对测距激光发生及数据处理的模块化,提升仪器的可靠性,同时便于维护。
56.本发明公开的用于同时进行坐标跟踪测量与高精度准直姿态测量的仪器的工作方法为:
57.参见附图6所示,将本发明的仪器安装并固定的专用支撑架7上,人工调整专用支撑架7高度及位置,使得被测件安装合作目标后运动范围内均具备可视化的条件,之后打开机器,连接上位机。当被测件需要进行大范围的空间位置及姿态测量时,需用配备跟踪准直测量目标,打开跟踪准直测量目标,此时耦合在测距激光中的指示激光通过测距激光光纤准直镜进入到衍射测距汇聚透反镜内,再经过反射镜的反射到达平面透反镜内,平面透反镜成45
°
安装在透反镜反射镜安装座上,经过反射后指示测距激光沿着镜组安装座的法向方向进入到安装在俯仰轴座107的中空框架内部的底部的主透反镜,经过主透反镜的反射进入反射镜,再经过反射镜的反射及水平角及俯仰角的调整即可实现宽范围的球坐标的测量,手动调整反射镜的角度,及自适应目标的平面镜角锥镜,使得本发明的仪器发射出的指示激光打到准直跟踪目标的平面角锥镜上,后准直跟踪准直目标6能够根据来的激光调整自身的水平角及俯仰角角度实现光路的原路返回,再经过反射镜的反射进入主透反镜,经过主透反镜反射进入到平面透反镜,此时返回的激光被分成两路,一路经过平面透反镜的投射进入到加层反射镜,并经过加层反射镜的反射进入到滤光片后滤掉测距激光,再经过激光准直透镜准直后打到激光位移感应传感器,激光位移感应传感器感应到指示激光的位移量如果偏移为零则不进行调整,如果偏移量不为零,则会给出位移量,并输入到集成式运动控制电路中,其产生控制信号到达电机运动驱动器,控制本发明二维跟踪测角组件1中的俯仰轴直驱力矩电机110、水平旋转轴直驱力矩电机分别驱动俯仰轴和水平旋转轴,进而带动安装俯仰轴上的平面反射镜105调整角度,直到激光位移感应传感器感应到指示激光的位移量小于控制限制量为止,此时指示激光则会打在跟踪准直测量目标角锥反射镜的角锥中心上。而另一路指示测距经过平面透反镜的反射后再经反射镜的反射、衍射测距汇聚透反镜的投射进入到测距激光光纤准直镜,再经过光纤的传输到达测距组件4实现绝对距离测量,获取跟踪准直目标6角锥点的距离,同时测得反射镜的水平和俯仰旋转的角度则可利用球坐标公式实现跟踪准直目标6的空间坐标测量。
58.跟踪准直测量目标与本发明的仪器连接并获取空间坐标测量后可实现跟踪测量,即跟踪准直测量目标安装在被测件上后,被测件移动后其能根据来光方向在进行自动的平面角锥镜的调整进而实现空间跟踪测量。当需要进行空间姿态测量时,打开安装在集成光学组件2上的准直光激光器,其发射的光经过准直激光衍射小透、衍射大透镜后在衍射测距汇聚透反镜处与指示测距激光汇合,再经再经过反射镜的反射到达平面透反镜内,平面透反镜成45
°
安装在透反镜反射镜安装座上,经过反射后指示测距激光沿着镜组安装座的法向方向进入到安装在俯仰轴座107的中空框架内部的底部的主透反镜,经过主透反镜的反射进入反射镜,到达自适应准直目标的平面角锥镜上,经过平面角锥镜上的平面部分反射镜的反射后,衍射激光进入到反射镜到到达主透反镜,并经主透反镜投射进入到自动变焦准直组件3的变焦镜组,变焦镜组在调焦电机的驱动下,在测距激光的反馈下实现实时的自动变焦,进入能够在准直图像相机上成清晰的准直光的像,再经过集成式控制测量组件5中的图像处理电路的实时处理获取中衍射光的中心点位置结合测距激光及水平角测角、俯仰角测角信息即可实现静止平面角锥镜的姿态测量,当采用跟踪准直测量目标时,平面角锥镜能够自适应的角度调整,调整后能够获取自适应调整的角度再结合跟踪准直测量目标上
安装的高精度倾角传感器108即可实现安装有跟踪准直测量目标的被测件的高精度的姿态测量,基于准直测量的姿态角的误差可控制在
±5″
内,进而提升大尺寸测量范围内空间位置姿态尤其是姿态角的测量精度。
59.以上仅为本技术的较佳实施例而已,并不用以限制本技术,凡在本技术的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本技术保护的范围之内。其它结构和原理与现有技术相同,这里不再赘述。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1