一种直埋电缆中间头故障快速探测无人机系统及方法与流程
本发明涉及电力故障检测,尤其涉及一种直埋电缆中间头故障快速探测无人机系统及方法。
背景技术:
1、随着城市的快速发展,电缆应用越为越广泛,而在电缆使用过程中,随着运行时间越来越久,必然会发生电缆击穿故障。通过多年的统计数据,电缆在非外力破坏下超过90%以上电缆故障为电缆附件造成的。而在电缆附件中,终端头可以采用定期巡视等方法进行检测,而电缆中间头通常运行条件恶劣,特别是南方地方,经常出现雨季时直埋电缆长时间水泡的情况,而且容易在运行电压、过电压、运行过程中应力、热涨冷缩等情况下,使中间头出现击穿现象。因此直埋电缆中间头的损坏情况占直埋电缆击穿故障的80%以上。
2、目前,需要人工到故障点现场后再开展精确定位,花费时间长,定位依赖现场工作人员经验,导致电缆故障检测准确性较低,同时,当定位点未发现信号后,需要转移至其它位置,浪费较长时间,导致电缆故障检测效率较低。
技术实现思路
1、本发明提供了一种直埋电缆中间头故障快速探测无人机系统及方法,解决了电缆故障检测准确性和检测效率较低的技术问题。
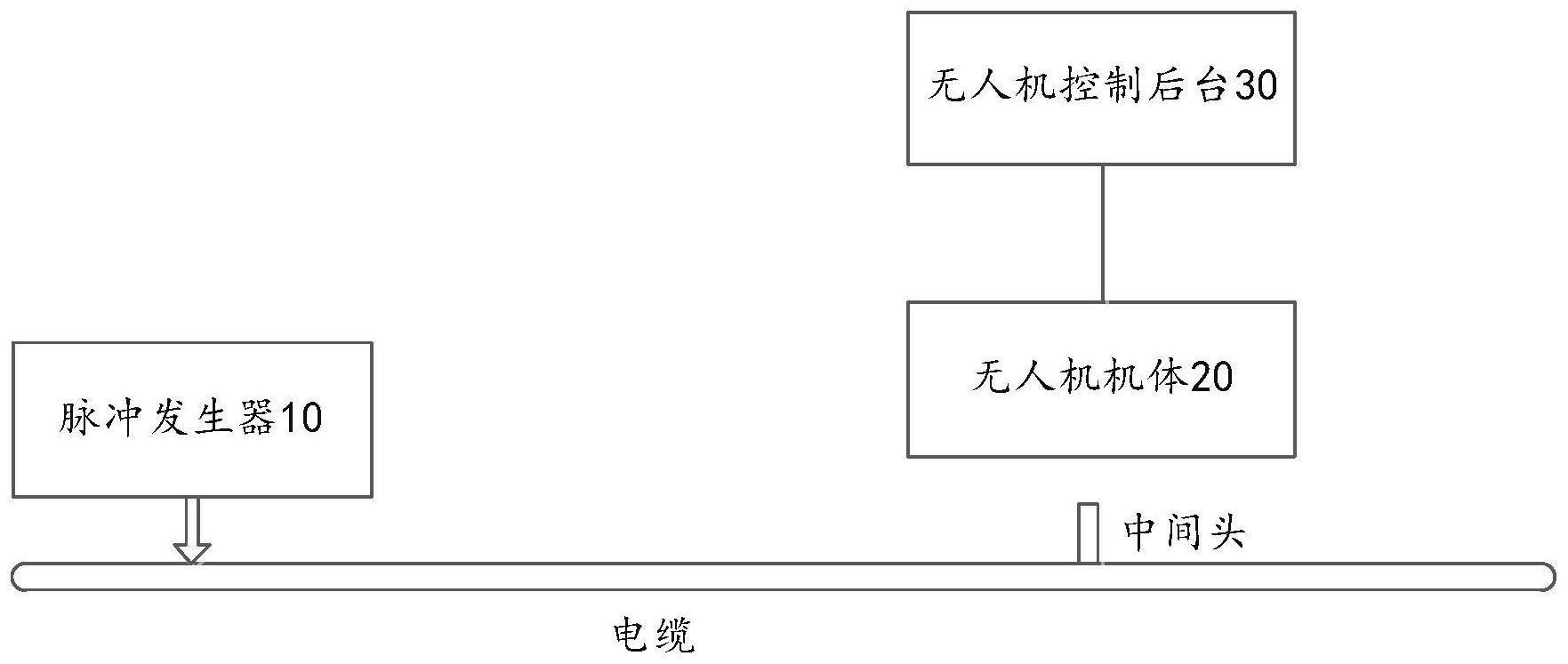
2、有鉴于此,本发明第一方面提供了一种直埋电缆中间头故障快速探测无人机系统,包括:脉冲发生器、无人机机体和无人机控制后台;
3、所述脉冲发生器用于产生脉冲信号,将所述脉冲信号注入至被测电缆中;
4、所述无人机机体设有北斗卫星授时模块、声音振动传感探针和处理模块;
5、所述声音振动传感探针用于获取待测电缆中间头的声音信号和电磁信号,还用于将所述声音信号和所述电磁信号发送至所述处理模块;
6、所述处理模块用于接收所述声音信号和所述电磁信号,记录所述声音信号和所述电磁信号分别对应的触发时间,还用于对所述声音信号和所述电磁信号进行预处理,将预处理后的所述声音信号和所述电磁信号发送至所述无人机控制后台;
7、所述北斗卫星授时模块用于对所述脉冲信号注入所述被测电缆的注入时间和所述电磁信号的所述触发时间进行同步授时;
8、所述无人机控制后台用于根据预先输入的中间头定位信息控制所述无人机机体飞行至所述待测电缆中间头的定位位置,还用于控制所述无人机机体垂直升降,使所述声音振动传感探针到达所述待测电缆中间头的预设检测位置,还用于基于声磁同步法根据所述处理模块发送的所述声音信号和所述电磁信号识别所述待测电缆中间头的故障情况。
9、优选地,本系统还包括绝缘电阻表,用于检测所述被测电缆是否处于高阻状态,若检测所述被测电缆处于高阻状态,则判定所述被测电缆存在故障。
10、优选地,所述无人机机体上还设有摄像头,用于获取地面图像。
11、优选地,所述无人机机体上还设有屏蔽罩,所述声音振动传感探针设于所述屏蔽罩内。
12、优选地,所述无人机控制后台包括第一判断模块和第二判断模块;
13、所述第一判断模块用于对所述电磁信号进行曲线拟合,得到电磁波形,将触发时间与注入时间相同的所述电磁波形与脉冲信号波形进行相似度计算,判断所述相似度是否大于预设的相似度阈值,若判断所述相似度大于预设的相似度阈值,则发送工作信号给所述第二判断模块;
14、所述第二判断模块用于根据所述声音信号和所述电磁信号分别对应的触发时间计算声磁触发时间差,判断所述声磁触发时间差是否大于预设的时间差阈值,若判断所述声磁触发时间差大于预设的时间差阈值,则判定所述待测电缆中间头为故障中间头,若判断所述声磁触发时间差不大于预设的时间差阈值,则判定所述待测电缆中间头为非故障中间头。
15、优选地,所述处理模块用于对所述声音信号和所述电磁信号进行滤波、放大处理。
16、第二方面,本发明提供了一种直埋电缆中间头故障快速探测无人机方法,应用上述的直埋电缆中间头故障快速探测无人机系统,包括以下步骤:
17、通过产生脉冲信号,将所述脉冲信号注入至被测电缆中;
18、根据预先输入的中间头定位信息控制无人机机体飞行至所述待测电缆中间头的定位位置,还通过控制所述无人机机体垂直升降,使声音振动传感探针到达待测电缆中间头的预设检测位置,获取待测电缆中间头的声音信号和电磁信号;
19、对所述脉冲信号注入所述被测电缆的注入时间和所述电磁信号的所述触发时间进行同步授时,记录所述声音信号和所述电磁信号分别对应的触发时间,对所述声音信号和所述电磁信号进行预处理;
20、基于声磁同步法根据预处理后的所述声音信号和所述电磁信号识别所述待测电缆中间头的故障情况。
21、优选地,本方法还包括:
22、检测所述被测电缆是否处于高阻状态,若检测所述被测电缆处于高阻状态,则判定所述被测电缆存在故障。
23、优选地,本方法还包括:获取地面图像。
24、优选地,基于声磁同步法根据预处理后的所述声音信号和所述电磁信号识别所述待测电缆中间头的故障情况的步骤具体包括:
25、对所述电磁信号进行曲线拟合,得到电磁波形,将触发时间与注入时间相同的所述电磁波形与脉冲信号波形进行相似度计算,判断所述相似度是否大于预设的相似度阈值,若判断所述相似度大于预设的相似度阈值,则执行下一步;
26、根据所述声音信号和所述电磁信号分别对应的触发时间计算声磁触发时间差,判断所述声磁触发时间差是否大于预设的时间差阈值,若判断所述声磁触发时间差大于预设的时间差阈值,则判定所述待测电缆中间头为故障中间头,若判断所述声磁触发时间差不大于预设的时间差阈值,则判定所述待测电缆中间头为非故障中间头。
27、从以上技术方案可以看出,本发明具有以下优点:
28、本发明通过将脉冲信号注入至被测电缆中,通过无人机根据预先输入的中间头定位信息到达待测电缆中间头的预设检测位置,利用声音振动传感探针获取待测电缆中间头的声音信号和电磁信号,通过记录声音信号和电磁信号分别对应的触发时间,对声音信号和电磁信号进行预处理,将预处理后的声音信号和电磁信号发送至所述无人机控制后台,通过对脉冲信号注入被测电缆的注入时间和所述电磁信号的触发时间进行同步授时,基于声磁同步法根据根据声音信号和电磁信号识别待测电缆中间头的故障情况,从而提高电缆故障检测准确性和检测效率。
技术特征:
1.一种直埋电缆中间头故障快速探测无人机系统,其特征在于,包括:脉冲发生器、无人机机体和无人机控制后台;
2.根据权利要求1所述的直埋电缆中间头故障快速探测无人机系统,其特征在于,还包括绝缘电阻表,用于检测所述被测电缆是否处于高阻状态,若检测所述被测电缆处于高阻状态,则判定所述被测电缆存在故障。
3.根据权利要求1所述的直埋电缆中间头故障快速探测无人机系统,其特征在于,所述无人机机体上还设有摄像头,用于获取地面图像。
4.根据权利要求1所述的直埋电缆中间头故障快速探测无人机系统,其特征在于,所述无人机机体上还设有屏蔽罩,所述声音振动传感探针设于所述屏蔽罩内。
5.根据权利要求1所述的直埋电缆中间头故障快速探测无人机系统,其特征在于,所述无人机控制后台包括第一判断模块和第二判断模块;
6.根据权利要求1所述的直埋电缆中间头故障快速探测无人机系统,其特征在于,所述处理模块用于对所述声音信号和所述电磁信号进行滤波、放大处理。
7.一种直埋电缆中间头故障快速探测无人机方法,应用权利要求1所述的直埋电缆中间头故障快速探测无人机系统,其特征在于,包括以下步骤:
8.根据权利要求7所述的直埋电缆中间头故障快速探测无人机方法,其特征在于,还包括:
9.根据权利要求7所述的直埋电缆中间头故障快速探测无人机方法,其特征在于,还包括:获取地面图像。
10.根据权利要求7所述的直埋电缆中间头故障快速探测无人机方法,其特征在于,基于声磁同步法根据预处理后的所述声音信号和所述电磁信号识别所述待测电缆中间头的故障情况的步骤具体包括:
技术总结
本发明涉及电力故障检测技术领域,公开了一种直埋电缆中间头故障快速探测无人机系统及方法,其系统通过将脉冲信号注入至被测电缆中,通过无人机根据预先输入的中间头定位信息到达待测电缆中间头的预设检测位置,利用声音振动传感探针获取待测电缆中间头的声音信号和电磁信号,通过记录声音信号和电磁信号分别对应的触发时间,对声音信号和电磁信号进行预处理,将预处理后的声音信号和电磁信号发送至无人机控制后台,通过对脉冲信号注入被测电缆的注入时间和电磁信号的触发时间进行同步授时,基于声磁同步法根据根据声音信号和电磁信号识别待测电缆中间头的故障情况,从而提高电缆故障检测准确性和检测效率。
技术研发人员:李国伟,王俊波,唐琪,张殷,范心明,李新,陈志平,刘崧,董镝,宋安琪,蒋维,刘少辉,陈贤熙,曾庆辉,梁年柏,刘昊,吴焯军,章涛,赖艳珊,郭国伟,陆志欣,何智祥,陈谦慎,王志刚,张伟忠,何胜红
受保护的技术使用者:广东电网有限责任公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!