一种基于多探头传感器数据的地下管道定位方法与流程
本发明涉及基于多传感器融合的数据处理领域,具体涉及一种基于多探头传感器数据的地下管道定位方法。
背景技术:
1、地下管道定位是对城市地下各种管线进行探查和测绘的方法,获得地下管道的准确位置,包括探寻各种管线的埋设位置和深度;因为地下管线种类多、专业性强,而且分属各个不同的专业部门管理,所以对于不同的管道类型需要选择不同的方法进行定位;常见的非金属管道则选用声波探测定位,根据地面接收到的管道声波,判断地下管道的深度与距离。
2、对于非金属地下管道的定位,主要根据地面探测管道声波信号,此时由于管道位置未知,导致不同的地面探测位置的探测效果不同,单个位置探测无法判断声波信号的方向信息,导致其探测不准确;探测获取声波信号易受噪声的影响,同样影响地下管道定位精度;同时,对于探头声波信号的噪声处理,一般的滤波都是基于窗口其他值进行线性加权,但是窗口中的其他数据同样可能存在噪声属性,从而影响降噪效果。
技术实现思路
1、本发明提供一种基于多探头传感器数据的地下管道定位方法,以解决现有的单探头探测结果不准确及受噪声影响较大的问题,所采用的技术方案具体如下:
2、本发明一个实施例提供了一种基于多探头传感器数据的地下管道定位方法,该方法包括以下步骤:
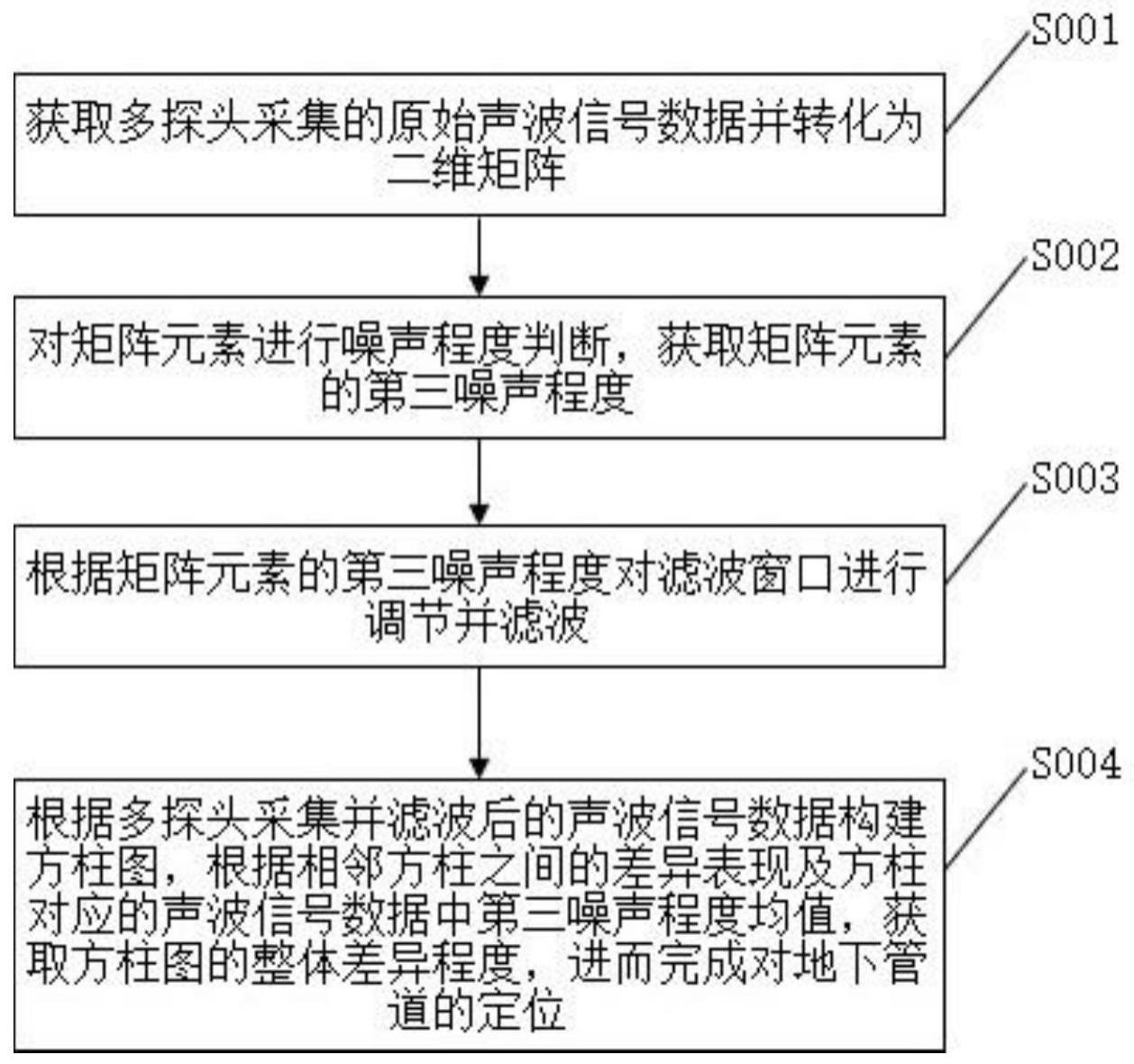
3、获取多探头采集的原始声波信号数据并转化为二维矩阵;
4、获取二维矩阵中同行相邻元素的标准差异,将矩阵元素与同列相邻的两个元素的方差作为元素的第一异常程度,将相邻右侧元素的第一异常程度与相邻左右两侧元素的第一异常程度之和的比值作为相邻左侧元素的第一加权系数,将相邻左侧元素的第一异常程度与相邻左右两侧元素的第一异常程度之和的比值作为相邻右侧元素的第一加权系数,根据矩阵元素与同行相邻的两个元素之间的差值、第一加权系数以及标准差异获取矩阵元素的第一噪声程度;
5、将相邻下方元素的第一噪声程度与相邻上下两侧元素的第一噪声程度之和的比值作为相邻上方元素的第二加权系数,将相邻上方元素的第一噪声程度与相邻上下两侧元素的第一噪声程度之和的比值作为相邻下方元素的第二加权系数,根据矩阵元素与同列相邻的两个元素之间的差值及第二加权系数获取矩阵元素的第二噪声程度,根据第一噪声程度及第二噪声程度获取矩阵元素的第三噪声程度;
6、根据矩阵元素同行及同列相邻的四个元素的第三噪声程度及矩阵元素的第三噪声程度表现对线性滤波窗口进行调节并滤波,获取滤波后的声波信号数据;
7、根据多探头采集并滤波后的声波信号数据的幅值关系及探头位置关系构建方柱图,根据方柱图中相邻方柱之间的差值,及相邻两个方柱对应的声波信号数据中第三噪声程度均值之和,获取方柱图的整体差异程度,根据整体差异程度及方柱幅值关系获取地下管道的定位结果。
8、可选的,所述获取多探头采集的原始声波信号数据并转化为二维矩阵,包括的具体方法为:
9、通过在地面安装多个探头传感器,接收地下管道物质震动发出的声波信号,得到时序的原始声波信号数据;将时序的原始声波信号数据按照季节变动周期进行分段,所述季节变动周期根据第一预设值得到,将分段的声波信号数据逐行排列转化为二维矩阵形式。
10、可选的,所述获取二维矩阵中同行相邻元素的标准差异,包括的具体方法为:
11、获取时序的原始声波信号数据中所有相邻时刻的声波信号幅值差,将所有声波信号幅值差中的众数作为原始声波信号数据的标准差异,所述二维矩阵中同行相邻元素对应的是原始声波信号数据相邻时刻的声波信号,将原始声波信号数据的标准差异作为二维矩阵中同行相邻元素的标准差异。
12、可选的,所述获取矩阵元素的第一噪声程度,包括的具体方法为:
13、
14、其中,ph(d)表示矩阵元素d的第一噪声程度,sa表示矩阵元素d同行左侧相邻的矩阵元素a2的第一异常程度,sb表示矩阵元素d同行右侧相邻的矩阵元素b2的第一异常程度,|a2-d|表示矩阵元素d与同行左侧相邻元素的差值,|b2-d|表示矩阵元素d与同行右侧相邻元素的差值,δh表示二维矩阵中同行相邻元素的标准差异。
15、可选的,所述获取矩阵元素的第二噪声程度,包括的具体方法为:
16、
17、其中,pl(d)表示矩阵元素d的第二噪声程度,表示矩阵元素d同列上方相邻的矩阵元素c1的第一噪声程度,表示矩阵元素d同列下方相邻的矩阵元素c2的第一噪声程度,|c1-d|表示矩阵元素d与同列上方相邻元素的差值,|c2-d|表示矩阵元素d与同列下方相邻元素的差值。
18、可选的,所述对线性滤波窗口进行调节并滤波,包括的具体方法为:
19、将待滤波的矩阵元素置于3×3线性滤波窗口中的中心位置,并作为滤波因子记为a0,同行左侧相邻的滤波因子记为a1,同行右侧相邻的滤波因子记为a2,同列上方相邻的滤波因子记为a3,同列下方相邻的滤波因子记为a4,将此五个位置的元素值作为滤波因子,窗口中其他位置滤波因子为0,每个滤波因子的权重值的计算方法为:
20、
21、其中,ej表示窗口中第j个滤波因子即aj的权重值,pj表示滤波因子aj对应位置矩阵元素的第三噪声程度;获取滤波结果的方法为:
22、
23、其中,a′0表示待滤波的矩阵元素的滤波结果,e1表示滤波因子a1的权重值,e2表示滤波因子a2的权重值,e3表示滤波因子a3的权重值,e4表示滤波因子a4的权重值,e0表示滤波因子a0的权重值,五个滤波因子分别对应五个位置的矩阵元素值。
24、可选的,所述获取方柱图的整体差异程度,包括的具体方法为:
25、
26、其中,d表示方柱图的整体差异程度,n表示方柱图中的方柱数量,ρi表示第i个方柱对应探头接收到的声波信号数据的第三噪声程度均值,ρi+1表示第o+1个方柱对应探头接收到的声波信号数据的第三噪声程度均值,xi和xi+1分别表示第i个方柱和第i+1个方柱的幅值,|xi-xi+1|表示第i个和第i+1个相邻方柱的幅值差异。
27、本发明相较于现有技术的有益效果是:利用多个探头的数据融合进行地下管道定位,避免单探头数据的不稳定造成的定位不准确,同时避免但探头多次探测,更有效地对地下管道进行定位;对声波信号数据进行滤波降噪,在滤波窗口中,考虑不同位置的噪声程度而确定不同的权重值,降低滤波窗口中其他元素的噪声对滤波结果的影响,获得更加准确的滤波结果;根据不同探头数据的噪声含量进行多探头的数据加权融合,减少融合数据中噪声含量,避免不同探头数据的不同噪声对最终结果的影响,从而获得更加准确的多探头数据之间的关系,进行更加准确的地下管道定位。
技术特征:
1.一种基于多探头传感器数据的地下管道定位方法,其特征在于,该方法包括以下步骤:
2.根据权利要求1所述的一种基于多探头传感器数据的地下管道定位方法,其特征在于,
3.根据权利要求1所述的一种基于多探头传感器数据的地下管道定位方法,其特征在于,所述获取二维矩阵中同行相邻元素的标准差异,包括的具体方法为:
4.根据权利要求1所述的一种基于多探头传感器数据的地下管道定位方法,其特征在于,所述获取矩阵元素的第一噪声程度,包括的具体方法为:
5.根据权利要求1所述的一种基于多探头传感器数据的地下管道定位方法,其特征在于,所述获取矩阵元素的第二噪声程度,包括的具体方法为:
6.根据权利要求1所述的一种基于多探头传感器数据的地下管道定位方法,其特征在于,所述对线性滤波窗口进行调节并滤波,包括的具体方法为:
7.根据权利要求1所述的一种基于多探头传感器数据的地下管道定位方法,其特征在于,所述获取方柱图的整体差异程度,包括的具体方法为:
技术总结
本发明涉及基于多传感器融合的数据处理领域,提出了一种基于多探头传感器数据的地下管道定位方法,包括:获取多探头采集的原始声波信号数据并转化为二维矩阵;对矩阵元素分别从水平方向及竖直方向上,与相邻元素间的差异表现进行噪声程度判断,获取矩阵元素的第三噪声程度;根据矩阵元素的第三噪声程度获取对滤波窗口中不同滤波因子的权重值,根据滤波因子及权重值得到最终滤波核并滤波;根据多探头采集并滤波后的声波信号数据构建方柱图,通过相邻方柱之间的差异表现及方柱对应的声波信号数据中第三噪声程度均值,获取方柱图的整体差异程度,进而完成对地下管道的定位。本发明旨在解决现有的单探头探测结果不准确及受噪声影响较大的问题。
技术研发人员:李建生,李玉霞
受保护的技术使用者:杭州交大仪器设备有限公司
技术研发日:
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!