充电站内定位方法及相关设备与流程
本发明涉及车辆,尤其涉及一种充电站内定位方法及相关设备。
背景技术:
1、随着新能源车辆的广泛使用,用户对充电站的需要也与日俱增。充电车辆寻找充电桩或移动辅助充电桩在站内寻找车辆时,由于充电站普遍被设置于建筑物地下或其内部。导致gps定位效果较差,而采用现有的图像和激光传感器等感知方式,由于存在光线或临时障碍物等因素影响,导致定位准确性较差,给用户充电带来不便。
技术实现思路
1、鉴于上述问题,本发明提供一种充电站内定位方法及相关设备,主要目的在于解决由于充电站普遍被设置于建筑物地下或其内部。导致gps定位效果较差,而采用现有的图像和激光传感器等感知方式,由于存在光线或临时障碍物等因素影响,导致定位准确性较差,给用户充电带来不便的问题。
2、为解决上述至少一种技术问题,第一方面,本发明提供了一种充电站内定位方法,用于充电车辆或移动辅助充电设备该方法包括:
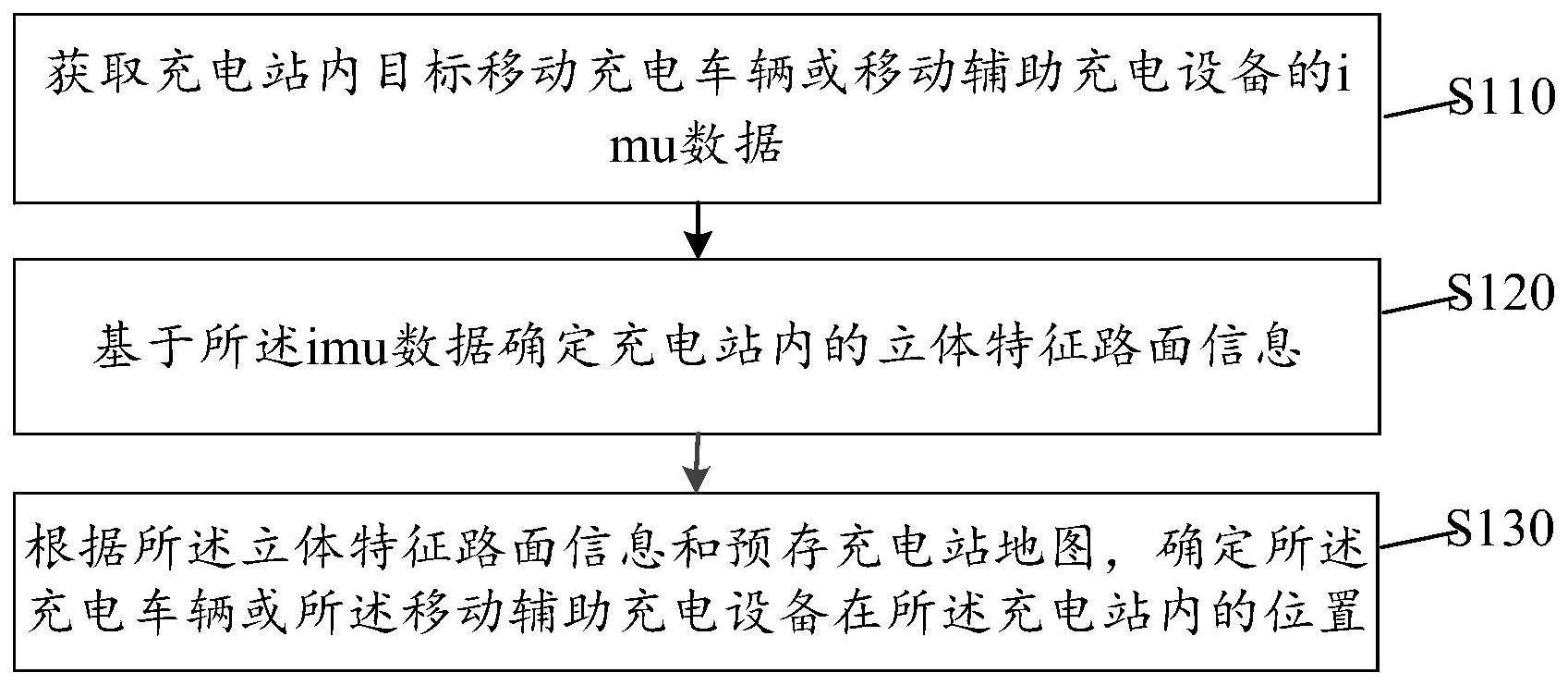
3、获取充电站内目标移动充电车辆或移动辅助充电设备的imu数据;
4、基于所述imu数据确定充电站内的立体特征路面信息;
5、根据所述立体特征路面信息和预存充电站地图,确定所述充电车辆或所述移动辅助充电设备在所述充电站内的位置。
6、可选的,所述根据所述立体特征路面信息和预存充电站地图,确定所述充电车辆或所述移动辅助充电设备在所述充电站内的位置,包括:
7、根据所述立体特征路面信息确定所述立体特征路面的立体特征类型;
8、在所述预存充电站地图查询所述立体特征类型的位置信息;
9、基于所述立体特征类型的位置信息确定所述充电车辆或所述移动辅助充电设备在所述充电站内的位置。
10、可选的,所述根据所述立体特征路面信息和预存充电站地图,确定所述充电车辆或所述移动辅助充电设备在所述充电站内的位置,包括:
11、根据至少两个所述立体特征路面信息、在至少两个所述立体特征路面之间车辆的行驶数据和预存充电站地图,确定所述充电车辆或所述移动辅助充电设备在所述充电站内的位置。
12、可选的,所述基于所述imu数据确定充电站内的立体特征路面信息,包括:
13、在所述imu数据指征所述目标移动车辆或所述移动辅助充电设备在预设时间间隔内存在连续的两次第一跳变的情况下,确定所述立体特征路面信息为减速带信息。
14、可选的,所述基于所述imu数据确定充电站内的立体特征路面信息,包括:
15、在所述imu数据指征所述目标移动车辆或所述移动辅助充电设备在预设时间间隔内存在连续的多次第二跳变的情况下,确定所述立体特征路面信息为防滑带信息,其中,所述第一跳变的幅值大于所述第二跳变的幅值。
16、可选的,所述基于所述imu数据确定充电站内的立体特征路面信息,包括:
17、在所述imu数据指征所述车辆处于坡道的情况下,确定所述立体特征路面信息为坡道信息。
18、可选的,所述行驶数据包括转向数据和行驶距离数据。
19、第二方面,本发明实施例还提供了一种充电站内定位装置,包括:
20、获取单元,用于获取充电站内目标移动充电车辆或移动辅助充电设备的imu数据;
21、确定单元,用于基于所述imu数据确定充电站内的立体特征路面信息;
22、定位单元,用于根据所述立体特征路面信息和预存充电站地图,确定所述充电车辆或所述移动辅助充电设备在所述充电站内的位置。
23、为了实现上述目的,根据本发明的第三方面,提供了一种计算机可读存储介质,上述计算机可读存储介质包括存储的程序,其中,在上述程序被处理器执行时实现上述的充电站内定位方法。
24、为了实现上述目的,根据本发明的第四方面,提供了一种电子设备,包括至少一个处理器、以及与上述处理器连接的至少一个存储器;其中,上述处理器用于调用上述存储器中的程序指令,执行上述的充电站内定位方法。
25、借由上述技术方案,本发明提供的充电站内定位方法,通过获取充电站内目标移动充电车辆或移动辅助充电设备的imu数据;基于所述imu数据确定充电站内的立体特征路面信息;根据所述立体特征路面信息和预存充电站地图,确定所述充电车辆或所述移动辅助充电设备在所述充电站内的位置。由于,充电站普遍位于建筑物地下或建筑物内部,导致gps定位效果较差,而采用现有的图像和激光传感器等感知方式,由于存在光线或临时障碍物等因素影响,导致定位准确性较差,给用户充电带来不便。通过轮速计采用常规方式进行定位,遇到车轮打滑等情况,依然会导致定位不准,这时需要寻找一个准确的起始修正定位点。由此,通过获取充电站内目标移动充电车辆或移动辅助充电设备的imu数据,而imu数据能够确定充电站内的减速带、防滑带等立体特征路面信息,那么根据这些立体特征路面信息和预存充电站地图,可以确定所述充电车辆或所述移动辅助充电设备在所述充电站内的位置。通过上述imu数据获取立体特征路面信息的方式利用与预存充电站地图来进行充电站内目标移动充电车辆或移动辅助充电设备的定位,能够避免其他传感器易受光线或临时障碍物等因素影响导致定位准确性较差的问题,并且在采用轮速计采用常规方式进行定位在遇到车轮打滑等情况定位不准确的问题。另外,由于imu传感器是充电车辆或所述移动辅助充电设备的原有基础传感器,通过imu数据获取立体特征路面信息,并不需要额外增设硬件,在提高定位精度的同时避免成本的增加。
26、相应地,本发明实施例提供的充电站内定位装置、设备和计算机可读存储介质,也同样具有上述技术效果。
27、上述说明仅是本发明技术方案的概述,为了能够更清楚了解本发明的技术手段,而可依照说明书的内容予以实施,并且为了让本发明的上述和其它目的、特征和优点能够更明显易懂,以下特举本发明的具体实施方式。
技术特征:
1.一种充电站内定位方法,其特征在于,用于充电车辆或移动辅助充电设备,包括:
2.根据权利要求1所述的方法,其特征在于,所述根据所述立体特征路面信息和预存充电站地图,确定所述充电车辆或所述移动辅助充电设备在所述充电站内的位置,包括:
3.根据权利要求1所述的方法,其特征在于,所述根据所述立体特征路面信息和预存充电站地图,确定所述充电车辆或所述移动辅助充电设备在所述充电站内的位置,包括:
4.根据权利要求2或3所述的方法,其特征在于,所述基于所述imu数据确定充电站内的立体特征路面信息,包括:
5.根据权利要求4所述的方法,其特征在于,所述基于所述imu数据确定充电站内的立体特征路面信息,包括:
6.根据权利要求2或3所述的方法,其特征在于,所述基于所述imu数据确定充电站内的立体特征路面信息,包括:
7.根据权利要求3所述的方法,其特征在于,所述行驶数据包括转向数据和行驶距离数据。
8.一种充电站内定位装置,其特征在于,包括:
9.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质包括存储的程序,其中,在所述程序被处理器执行时实现如权利要求1至权利要求7中任一项所述的充电站内定位方法。
10.一种电子设备,其特征在于,所述电子设备包括至少一个处理器、以及与所述处理器连接的至少一个存储器;其中,所述处理器用于调用所述存储器中的程序指令,执行如权利要求1至权利要求7中任一项所述的充电站内定位方法。
技术总结
本发明公开了一种充电站内定位方法及相关设备,主要目的在于解决由于充电站普遍被设置于建筑物地下或其内部。导致gps定位效果较差,而采用现有的图像和激光传感器等感知方式,由于存在光线或临时障碍物等因素影响,导致定位准确性较差,给用户充电带来不便的问题。该方法包括:获取充电站内目标移动充电车辆或移动辅助充电设备的imu数据;基于所述imu数据确定充电站内的立体特征路面信息;根据所述立体特征路面信息和预存充电站地图,确定所述充电车辆或所述移动辅助充电设备在所述充电站内的位置。
技术研发人员:蒋亚西,李建朋,李成杰,岳川元,金梦磊
受保护的技术使用者:浙江安吉智电控股有限公司
技术研发日:
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!