一种雷达初始定向方法与流程
本发明涉及雷达监测,具体涉及一种雷达初始定向方法。
背景技术:
1、地基圆弧合成孔径雷达能够实现大范围的形变监测,其监测范围为一扇形,由距离向和角度向的分辨率将雷达监测范围划分为若干小扇形单元格,其监测结果为小扇形单元格内的相对于初始监测时的累计形变量。
2、为了更好的展示实际地形上各个位置的形变情况,通常需要将雷达的二维形变场与三维地形叠加,例如中国专利(申请号:cn202011110192.3)实现了雷达二维形变场与三维地形叠加的快速计算,而在实际应用中,为了准确叠加,需要确定雷达初始的方位角,现有常规的方位角测量一般可以采用rtk或者全站仪,但是由于外界条件限制,有时没法使用这些设备。
3、综上所述,急需一种雷达初始定向方法以解决现有技术中需依赖外部设备确定初始方位以及不能准确确定雷达初始方位角的问题。
技术实现思路
1、本发明目的在于提供一种雷达初始定向方法,以解决现有技术中需依赖外部设备确定初始方位以及不能准确确定雷达初始方位角的问题,具体技术方案如下:
2、一种雷达初始定向方法,包括如下步骤:
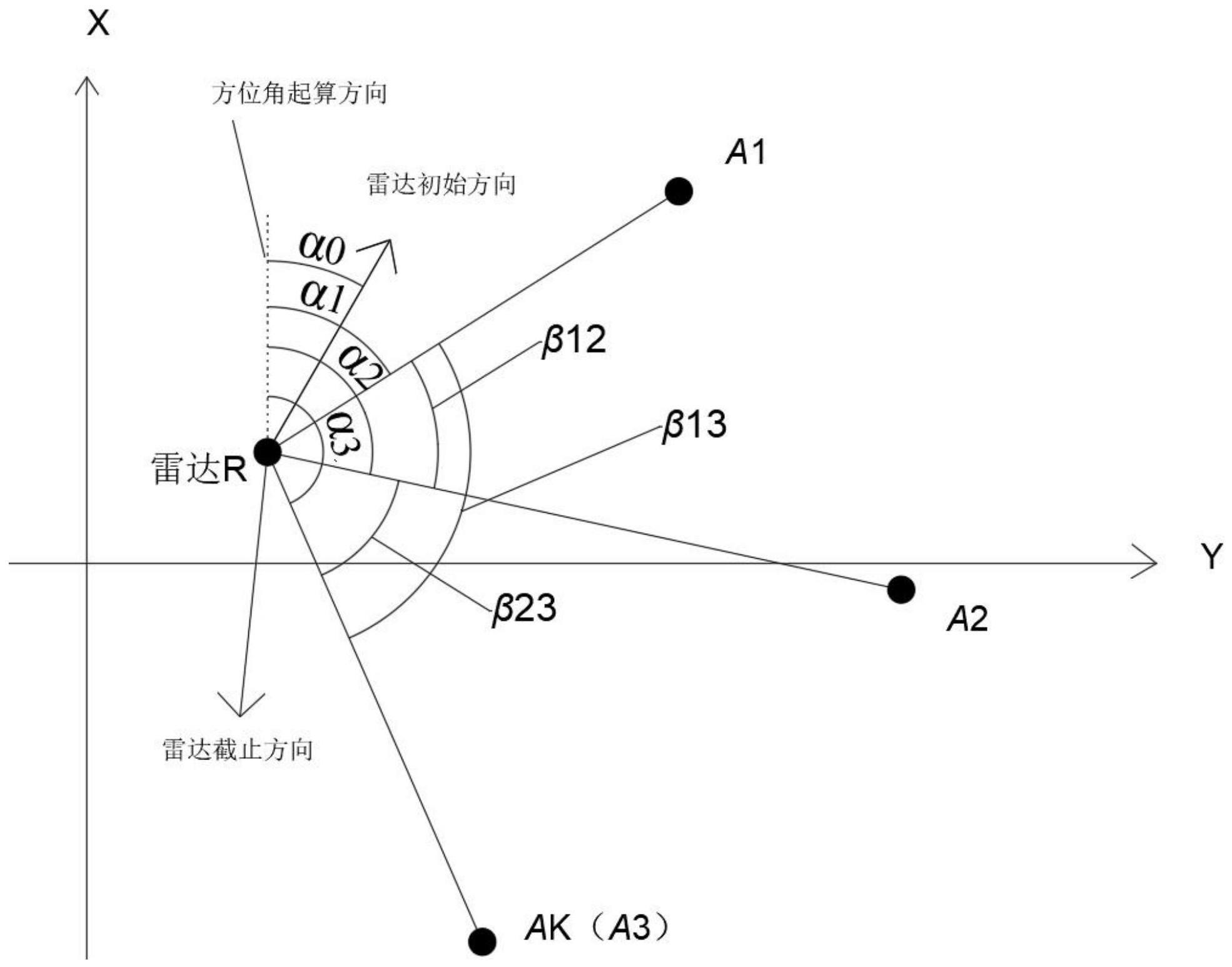
3、步骤s1:建立平面坐标系,平面坐标系以北方向为x轴正方向,东方向为y轴正方向;步骤s2:安装雷达,并在待监测位置沿雷达扫描的角度向布设k个角反射器,定义角反射器和雷达的连线与x轴正方向的夹角为该角反射器的方位角α;
4、步骤s3:利用三维建模技术对整个项目区域进行建模,生成用步骤s1的平面坐标系表达的三维模型,通过三维模型选取角反射器的平面坐标;
5、步骤s4:基于选取的角反射器的的平面坐标,计算角反射器的方位角的修正值;
6、步骤s5:基于方位角的修正值计算出角反射器的初始方位角,通过角反射器的初始方位角确定雷达的初始方位角。
7、以上技术方案优选的,所述步骤s2中,
8、在雷达安装前,在监测墩正中间埋设有强制对中器,在强制对中器上安装gnss天线,接收不少于2小时gnss信号,对gnss数据进行后处理得到雷达安装点位的坐标,将雷达安装至监测墩上;
9、沿雷达的角度向顺时针对k个角反射器进行依次编号,其中k≥2且角反射器布设规则需满足如下条件:
10、在雷达监测的距离向上,存在至少两个角反射器的分布距离不小于1/2雷达距离向监测范围;
11、在雷达监测的角度向上,存在至少两个角反射器的分布角度不小于1/2雷达角度向监测范围;
12、任意两个角反射器在距离向上的分布不小于100倍的雷达距离分辨率;
13、任意两个角反射器在角度向上的分布不小于100倍的雷达角度分辨率。
14、以上技术方案优选的,所述步骤s4包括
15、步骤s4.1:基于在步骤s3中选取的角反射器的平面坐标,计算在角度向相邻的两个角反射器与雷达构成的夹角的闭合误差;
16、步骤s4.2:基于闭合误差计算步骤s4.1中所述夹角的改正数,并通过改正数计算得到该夹角经过改正后的角度;
17、步骤s4.3:通过改正后的角度计算出角反射器对应的方位角α的修正值。
18、以上技术方案优选的,步骤s4.1中,闭合误差δβ如式1)所示:
19、
20、其中,βi(i+1)表示在角度向相邻的第i个角反射器和第i+1个角反射器与雷达构成的夹角;β1k表示第1个角反射器和第k个角反射器与雷达构成的夹角。
21、以上技术方案优选的,步骤s4.2中,所述夹角的改正数δβi'如式2)所示:
22、
23、以上技术方案优选的,步骤s4.2中,改正后的角度βi(i+1)'如式3)所示:
24、βi(i+1)’=βi(i+1)+δβ’i 3);
25、其中,i依次取1,2,…k-1。
26、以上技术方案优选的,步骤s4.3中,
27、通过改正后的角度计算所有角反射器对应的方位角α的修正值如式4)所示:
28、
29、其中,αi'表示第i个角反射器的方位角的修正值;αi表示第i个角反射器的方位角;βj(j+1)'表示在角度向相邻的第j个角反射器和第j+1个角反射器与雷达构成的夹角经过改正后的角度。
30、以上技术方案优选的,在每次计算相邻两个角反射器与雷达构成的夹角时,均在三维模型中重新选取角反射器的平面坐标进行计算。
31、以上技术方案优选的,步骤s5中,角反射器i的初始方位角如式5)所示:
32、
33、ci表示在雷达扫描结果中,第i个角反射器所处单元格的角度向编号;δθ表示雷达的角度分辨率。
34、以上技术方案优选的,步骤s5中,雷达的初始方位角α0如式6)所示:
35、
36、其中,k表示角反射器的总数量。
37、应用本发明的技术方案,具有以下有益效果:
38、(1)本发明提供的初始定向方法容易实现,能满足工程使用精度要求,不需要太多额外设备即可实现初始定向,能够为后续雷达监测结果的处理提供帮助,并且相比于现有技术,如果使用rtk,除了需要流动站位,还需要一套基准站及通信设备;如果是使用cors,很多项目在偏远山区,没有cors信号,如果是使用全站仪,需要额外背一套几十斤的全站仪设备,如果项目是在崎岖的山区或者海拔几千米的山区,还需要昂贵的额外成本。
39、(2)采用rtk或者全站仪需要测量基线,但是很多时候雷达布设在范围很小的山顶等地方,无法测量基线,如果使用自动陀螺仪定向,一方面精度无法满足需求,另一方面外界环境对陀螺仪影响太大,而本发明的方法在进行无人机航测时利用gnss测量雷达转轴中心坐标,航测三维模型生成后即可马上计算出初始定向角度,既节约了工程成本,又节约了时间成本。
40、除了上面所描述的目的、特征和优点之外,本发明还有其它的目的、特征和优点。下面将参照图,对本发明作进一步详细的说明。
技术特征:
1.一种雷达初始定向方法,其特征在于,包括如下步骤:
2.根据权利要求1所述的雷达初始定向方法,其特征在于,所述步骤s2中,在雷达安装前,在监测墩正中间埋设有强制对中器,在强制对中器上安装gnss天线,接收不少于2小时gnss信号,对gnss数据进行后处理得到雷达安装点位的坐标,将雷达安装至监测墩上;
3.根据权利要求1或2所述的雷达初始定向方法,其特征在于,所述步骤s4包括步骤s4.1:基于在步骤s3中选取的角反射器的平面坐标,计算在角度向相邻的两个角反射器与雷达构成的夹角的闭合误差;
4.根据权利要求3所述的雷达初始定向方法,其特征在于,步骤s4.1中,闭合误差δβ如式1)所示:
5.根据权利要求4所述的雷达初始定向方法,其特征在于,步骤s4.2中,所述夹角的改正数δβ′i如式2)所示:
6.根据权利要求5所述的雷达初始定向方法,其特征在于,步骤s4.2中,改正后的角度βi(i+1)'如式3)所示:
7.根据权利要求4-6任意一项所述的雷达初始定向方法,其特征在于,步骤s4.3中,通过改正后的角度计算所有角反射器对应的方位角α的修正值如式4)所示:
8.根据权利要求7所述的雷达初始定向方法,其特征在于,在每次计算相邻两个角反射器与雷达构成的夹角时,均在三维模型中重新选取角反射器的平面坐标进行计算。
9.根据权利要求7所述的雷达初始定向方法,其特征在于,步骤s5中,角反射器i的初始方位角αi0如式5)所示:
10.根据权利要求9所述的雷达初始定向方法,其特征在于,步骤s5中,雷达的初始方位角α0如式6)所示:
技术总结
本发明公开一种雷达初始定向方法,本发明的方法容易实现,能满足工程使用精度要求,不需要太多额外设备即可实现初始定向,能够为后续雷达监测结果的处理提供帮助,并且相比于现有技术,如果使用RTK,除了需要流动站位,还需要一套基准站及通信设备;如果是使用CORS,很多项目在偏远山区,没有CORS信号,如果是使用全站仪,需要额外背一套几十斤的全站仪设备,如果项目是在崎岖的山区或者海拔几千米的山区,还需要昂贵的额外成本。
技术研发人员:杜年春,谢翔,沈向前,黄毅
受保护的技术使用者:中铝国际工程股份有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!