一种远程激光测风雷达系统方法与流程
本发明涉及气象研究领域,具体来说,涉及一种远程激光测风雷达系统方法。
背景技术:
1、在气象研究和应用的广阔领域中,如保障航空安全、提高风能利用率、大气污染监测,完整准确地了解矢量风场的情况是非常重要的。在保障航空安全方面,相干多普勒测风激光雷达,可以对晴空湍流、机场风切变等进行有效探测,提高飞机起降安全和机场运行效率。在提高风能利用率方面,经过十几年发展,出现了基于相干多普勒测风激光雷达的风电厂选址评估方法,前馈涡轮机控制策略和功率曲线评估方法,在大气污染监测方面,使用相干多普勒测风激光雷达和偏振激光雷达相结合,可以通过大气回波信号的退偏振比,判断大气颗粒污染物的种类和来源,并通过风场观测,预测污染物的扩散路径。
2、多普勒雷达是目前唯一能够观测对流活动中风场随时间和空间变化的工具。一般来说,多普勒激光测风雷达系统由以下几个部分组成:激光器、电控模块、扫描器、电源模块及望远镜,具体而言,由出射模块发射激光经过分束器后分为出射激光、本振光,将出射激光进行调制后由望远镜射出,经过气溶胶粒子反射后与本振光进行拍频,进入数据处理模块,最后被接收模块接收。
3、但是,用单部雷达反演矢量风场的许多技术,需要一个风场均匀性的假设以及复杂、烦琐的数学运算和过分依赖于物理模式的预测,并且单部多普勒激光测风雷达只能测量矢量风场中的一个分量(径向风速分量),对于完整矢量风场反演可靠性较低。用两部或多部多普勒雷达观测数据,进行矢量风场的反演,取得了较好的结果,但这种用多部多普勒雷达组网反演矢量风场的方法,由于存在造价昂贵及各雷达测量同一目标时空同步性较差的问题,在实际应用和科学研究领域中较难发展起来。
4、针对相关技术中的问题,目前尚未提出有效的解决方案。
技术实现思路
1、针对相关技术中的问题,本发明提出一种远程激光测风雷达系统方法,以克服现有相关技术所存在的上述技术问题。
2、为此,本发明采用的具体技术方案如下:
3、一种远程激光测风雷达系统方法,该方法包括以下步骤:
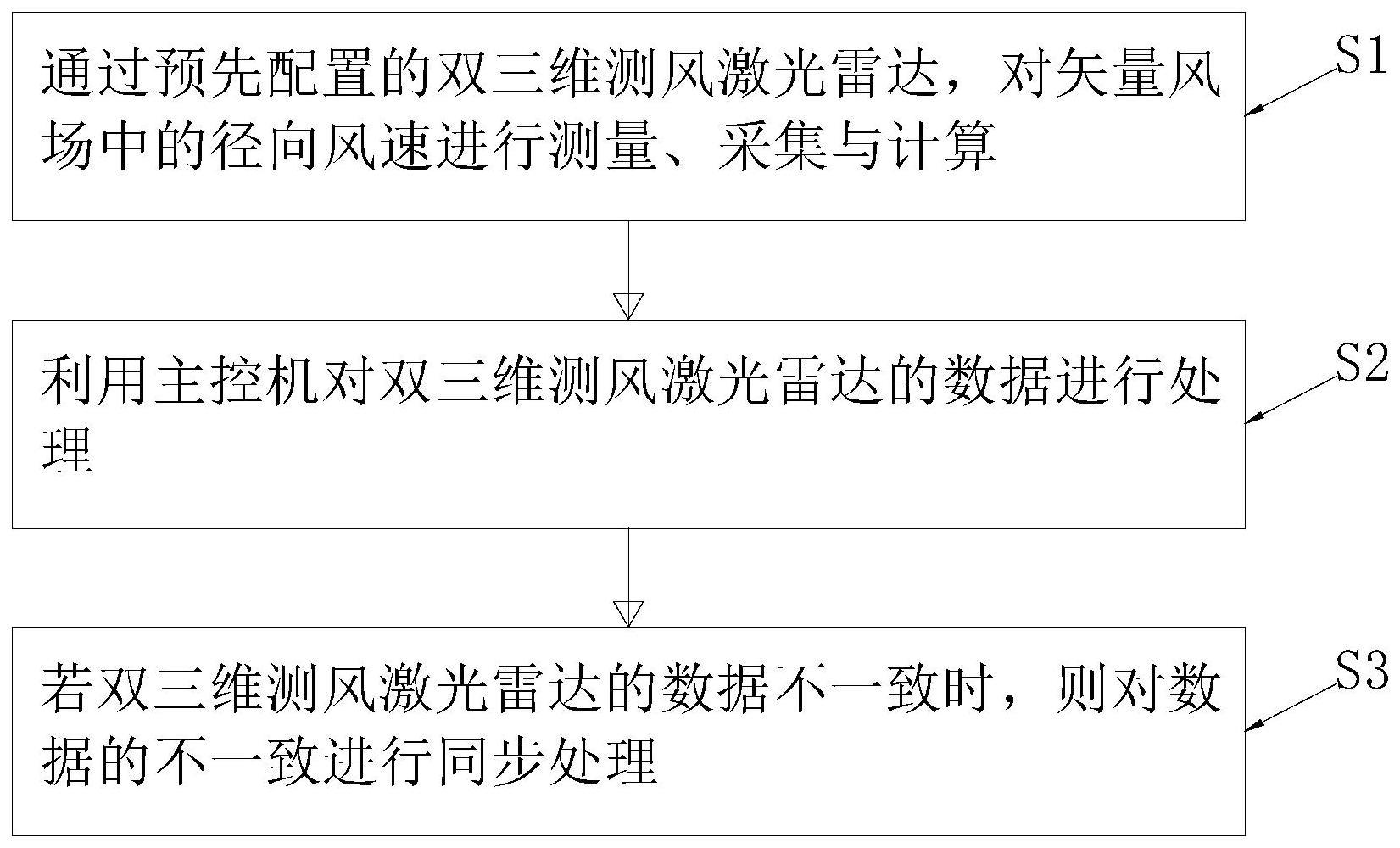
4、通过预先配置的双三维测风激光雷达,对矢量风场中的径向风速进行测量、采集与计算;
5、利用主控机对双三维测风激光雷达的数据进行处理;
6、若双三维测风激光雷达的数据不一致时,则对数据的不一致进行同步处理。
7、进一步的,所述对矢量风场中的径向风速进行计算时,通过双三维测风激光雷达获得径向风速,并对径向风速进行解析,得到径向风速分量方程:
8、
9、
10、式中,rws1、rws2为两台三维测风激光雷达获得的径向风速;
11、β为方位角,为俯仰角;
12、vx、vy、vz为北、东、垂方向上的分量,垂方向上的分量为0。
13、进一步的,所述利用主控机对双三维测风激光雷达的数据进行处理还包括以下步骤:
14、利用主控机对双三维测风激光雷达下发扫描策略;
15、对双三维测风激光雷达测量得到的径向风速进行时空对齐,并反演矢量风场;
16、在双三维测风激光雷达测量过程中,对双三维测风激光雷达测量进行实时监控及干预;
17、其中,所述对双三维测风激光雷达测量得到的径向风速进行时空对齐,并反演矢量风场包括计算水平风速vh及水平风向vdir;
18、通过主控机根据径向风速分量方程对vx、vy进行解算,得到:
19、
20、
21、式中,vx、vy为北、东方向上的分量。
22、进一步的,所述双三维测风激光雷达的数据不一致包括时间不一致及空间不一致,并对时间不一致及空间不一致进行同步处理。
23、其中,所述对时间不一致进行同步处理时,利用主控机且通过延长测量场景中运动的命令时间对速度较快的三维测风激光雷达进行减慢。
24、所述利用主控机通过延长测量场景中运动的命令时间对速度较快的三维测风激光雷达进行减慢还包括以下步骤:
25、利用wcs网络模块计算出双三维测风激光雷达之间的时间同步性误差;
26、预先设定自动历程及最大延迟阈值,且若用户配置的最大延迟阈值达标,则更快的对时间响应较慢的雷达发送同步命令。
27、其中,所述对空间不一致进行同步处理时,包括修正电机编码器位置读数、修正校准产生的偏差达到0.1m/s的风速精度、修正调平产生的偏差实现精度达到0.5°-0.3°及修正镜面安装产生的偏差实现精度达到0.3°-0.1°。
28、进一步的,所述修正电机编码器位置读数时,参考编码器在无间隙方向上的位置读数获取的伺服误差,并将该伺服误差补偿到运动控制器中。
29、进一步的,所述修正校准产生的偏差包括以下步骤:
30、基于差分gps并以utm坐标系中的x、y和z坐标的形式,获取三维测风激光雷达扫描头顶部的位置;
31、位于径向速度测量的位置配置硬目标,并利用扫描头和硬目标顶部的位置,计算预期的方位角和仰角;
32、若实际原位符合标称原位,则依次引导激光束扫描硬目标顶部,同时比较预期和实际的方位角和仰角,将预期与实际的方位角偏差量和仰角偏差量引入回位plc。
33、进一步的,所述修正调平产生的偏差包括以下步骤:
34、位于扫描头的底部设置测距仪,并位于三维测风激光雷达周围安装至少两个额外硬目标;
35、调平完成后,使用与原始位置测试相同的程序进行检查调平,若调平正确,则额外硬目标之间的偏移相等并趋于零,否则,通过utm坐标系推导扫描仪头定位的坐标系,并补偿错误调平。
36、进一步的,所述修正镜面安装产生的偏差包括以下步骤:
37、位于三维测风激光雷达周围安装至少六个额外硬目标;
38、通过原点计算的不确定性及水平仪的俯仰和滚动计算的偏差确定三维测风激光雷达中望远镜的反射镜角位移估计偏差,并进行修正。
39、本发明的有益效果为:
40、(1)本发明的一种远程激光测风雷达系统方法,能够由用户定义扫描模式并下发至主控机,通过主控机下发扫描参数至两台多普勒激光测风雷达,并利用实时获得的秒级径向风速进行矢量风场的反演,通过主控机来减慢两台雷达中速度相对较快的一台反应时间以及利用阈值来进行时间同步。
41、(2)本发明分别对电机编码器位置读数、校准、调平、镜面安装产生的偏差进行补偿,进而使得两台多普勒激光测风雷达实现空间同步。
技术特征:
1.一种远程激光测风雷达系统方法,其特征在于,该方法包括以下步骤:
2.根据权利要求1所述的一种远程激光测风雷达系统方法,其特征在于,所述对矢量风场中的径向风速进行计算时,通过双三维测风激光雷达获得径向风速,并对径向风速进行解析,得到径向风速分量方程:
3.根据权利要求2所述的一种远程激光测风雷达系统方法,其特征在于,所述利用主控机对双三维测风激光雷达的数据进行处理还包括以下步骤:
4.根据权利要求1所述的一种远程激光测风雷达系统方法,其特征在于,所述双三维测风激光雷达的数据不一致包括时间不一致及空间不一致,并对时间不一致及空间不一致进行同步处理;
5.根据权利要求4所述的一种远程激光测风雷达系统方法,其特征在于,所述利用主控机通过延长测量场景中运动的命令时间对速度较快的三维测风激光雷达进行减慢还包括以下步骤:
6.根据权利要求4所述的一种远程激光测风雷达系统方法,其特征在于,所述对空间不一致进行同步处理时,包括修正电机编码器位置读数、修正校准产生的偏差达到0.1m/s的风速精度、修正调平产生的偏差实现精度达到0.5°-0.3°及修正镜面安装产生的偏差实现精度达到0.3°-0.1°。
7.根据权利要求6所述的一种远程激光测风雷达系统方法,其特征在于,所述修正电机编码器位置读数时,参考编码器在无间隙方向上的位置读数获取的伺服误差,并将该伺服误差补偿到运动控制器中。
8.根据权利要求6所述的一种远程激光测风雷达系统方法,其特征在于,所述修正校准产生的偏差包括以下步骤:
9.根据权利要求6所述的一种远程激光测风雷达系统方法,其特征在于,所述修正调平产生的偏差包括以下步骤:
10.根据权利要求6所述的一种远程激光测风雷达系统方法,其特征在于,所述修正镜面安装产生的偏差包括以下步骤:
技术总结
本发明公开了一种远程激光测风雷达系统方法,该方法包括以下步骤:通过预先配置的双三维测风激光雷达,对矢量风场中的径向风速进行测量、采集与计算;利用主控机对双三维测风激光雷达的数据进行处理;若双三维测风激光雷达的数据不一致时,则对数据的不一致进行同步处理。本发明通过主控机下发扫描参数至两台多普勒激光测风雷达,并利用实时获得的秒级径向风速进行矢量风场的反演,通过主控机来减慢两台雷达中速度相对较快的一台反应时间以及利用阈值来进行时间同步;对电机编码器位置读数、校准、调平、镜面安装产生的偏差进行补偿,进而使得两台多普勒激光测风雷达实现空间同步。
技术研发人员:刘知新,肖增利,赵旭东,汪澜
受保护的技术使用者:南京牧镭激光科技股份有限公司
技术研发日:
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!