一种船体焊缝缺陷检测识别装置及方法
本发明涉及焊缝缺陷检测识别,尤其涉及一种船体焊缝缺陷检测识别装置及方法。
背景技术:
1、海运是一种重要的交通运输方式,船舶长期行驶于海洋、江河中,由于工作环境恶劣且船体焊缝暴露在船体表面,船体焊缝容易因腐蚀而出现缺陷。若船体焊缝出现严重缺陷容易引发事故,因此需要定期对船体焊缝进行检测和修补。
2、目前,船体焊缝的检测工作主要通过人工手持检测尺、测厚仪等检测工具进行检测。当船体较大,需要检测工人通过安全绳悬吊进行攀爬作业。这种采用人工进行检测的方式不仅效率较低,还存在着一定的安全隐患。
技术实现思路
1、本发明的目的在于:针对上述现有技术中存在的不足,提供一种船体焊缝缺陷检测识别装置及方法,其能够实现船体焊缝缺陷检测识别工作的自动化,从而提高船体焊缝缺陷检测工作的效率并减少检测过程中的安全隐患。
2、为实现上述目的,本发明采用以下技术方案:
3、第一方面,提供一种船体焊缝缺陷检测识别装置,包括:
4、移动机构,被配置为可根据事先规划好的移动路径进行移动;
5、升降机构,所述升降机构设置于所述移动机构上;
6、检测机构,所述检测机构包括机械臂和检测组件,所述机械臂设置于所述升降机构上,所述检测组件设置于所述机械臂上;
7、工控主机,所述工控主机分别连接所述移动机构、所述升降机构和所述检测机构;
8、当所述移动机构移动至船体上的每一焊缝附近时停止移动,所述升降机构和机械臂配合驱动所述检测组件对每一焊缝的形态特征进行图像采集并将所采集的图像输送到所述工控主机中进行识别处理。
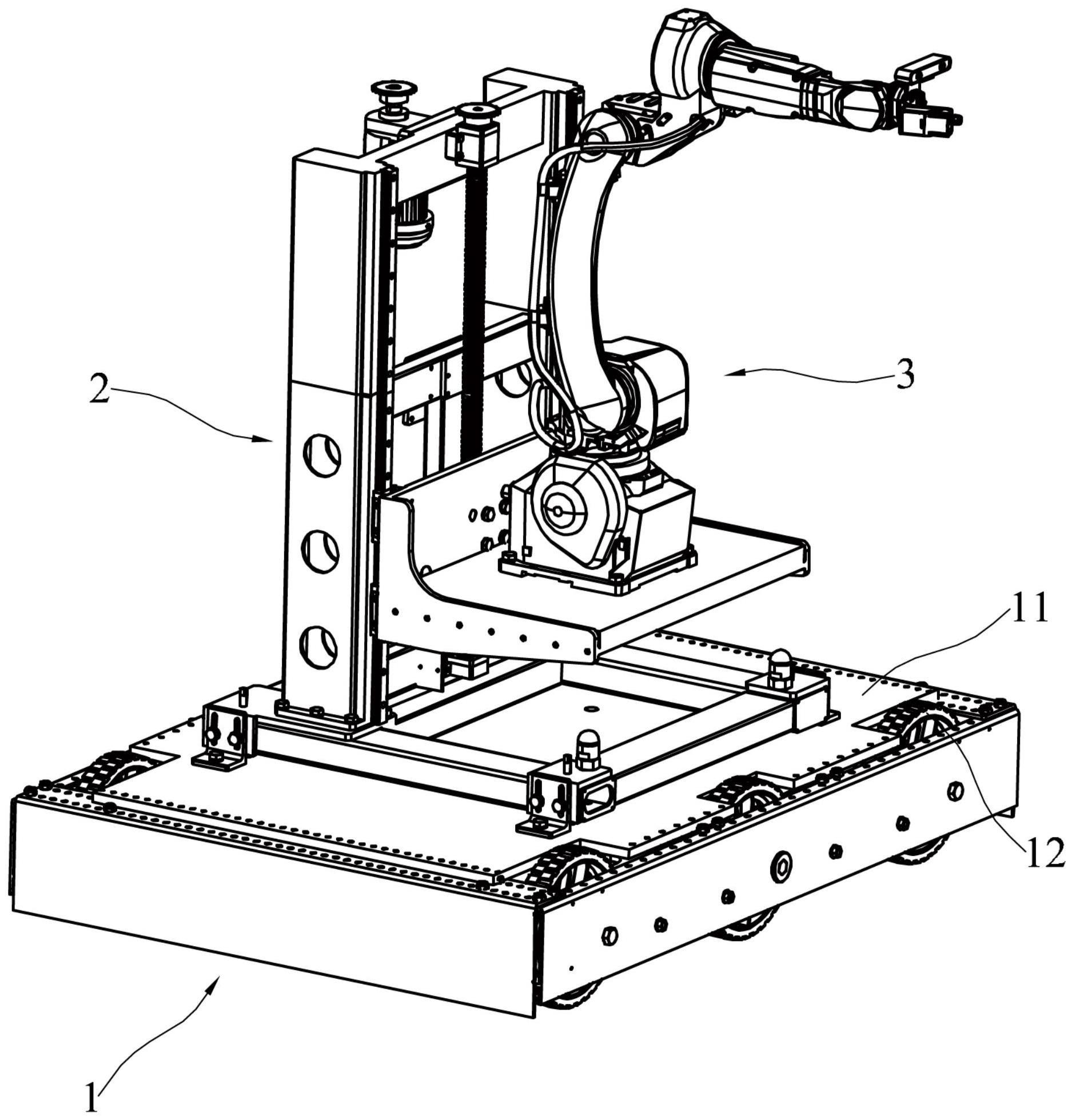
9、优选的,所述移动机构包括载板,所述载板上具有移动电机、移动控制器和若干移动轮,所述移动控制器连接所述移动电机和所述工控主机,所述移动电机用于驱动全部或其中部分所述移动轮转动,从而驱动所述载板进行移动。
10、优选的,所述升降机构包括机架、升降平台和升降驱动机构,所述升降平台沿所述机架高度方向滑动设置于所述机架上,所述升降驱动机构设置于所述机架上并与所述升降平台传动连接,所述升降驱动机构用于驱动所述升降平台沿所述机架高度方向上下升降。
11、优选的,所述机架沿其宽度两侧分别设置有导轨,所述升降平台上具有与所述导轨滑动连接的滑块。
12、优选的,所述升降驱动机构包括丝杆、升降螺母、升降电机和升降控制器,所述升降电机与所述丝杆传动连接,所述升降螺母旋合于所述丝杆上并与所述升降平台连接,所述升降控制器连接所述升降电机和所述工控主机。
13、优选的,所述升降电机通过链传动机构与所述丝杆传动连接,所述链传动机构包括主动链轮、从动链轮和传动链条,所述主动链轮由升降电机进行驱动,所述从动链轮设置于所述丝杆上,所述传动链条绕设于所述主动链轮和所述从动链轮上。
14、优选的,所述机械臂为六轴工业机械臂。
15、优选的,所述检测组件包括视觉传感器和激光发射器,所述视觉传感器为双目视觉传感器。
16、第二方面,提供一种船体焊缝缺陷检测识别方法,其使用如上述第一方面中所述的船体焊缝缺陷检测识别装置对船体焊缝缺陷进行检测,包括以下步骤:
17、根据所述船体焊缝缺陷检测识别装置的工作环境构建全局地图;
18、构建拓扑地图对全局地图上的障碍物进行标记并根据船体模型上每一条焊缝的位置在所述全局地图上设置经停点,根据所述障碍物和所述经停点规划所述移动机构的移动路径;
19、获取待检测船体三维模型,根据所述待检测船体三维模型上的每条焊缝的形态特征规划所述检测组件采集每条焊缝图像时的移动轨迹;
20、所述移动机构从初始位置开始沿所述移动路径进行移动,所述移动机构移动至每一所述经停点时,所述移动机构停止移动,所述检测组件沿所述移动轨迹采集每条焊缝的图像并将采集到的图像传输到所述工控主机中进行识别处理,当识别到焊缝上存在缺陷时,所述工控主机输出所述缺陷的类型和位置;
21、所述移动机构在所述检测组件和所述工控主机完成对船体上所有焊缝的检测后移动回所述初始位置。
22、优选的,所述检测组件采集每条焊缝的图像时,所述工控主机会对所述激光发射器射出的激光图像进行处理以得到激光图像中奇异点的位置坐标,并通过计算所述奇异点坐标与激光图像中心点坐标差值得到偏差量,所述工控主机根据所述偏差量控制所述机械臂进行偏差补偿。
23、与现有技术相比,本发明的有益效果在于:
24、本发明使用时,移动机构可根据事先规划好的移动路径进行移动,当移动机构移动至船体上的每一焊缝附近时停止移动,升降机构和机械臂配合驱动检测组件对每一焊缝的形态特征进行图像采集并将所采集的图像输送到工控主机中进行识别处理,当工控主机识别到焊缝上出现缺陷时,工控主机会对缺陷的类型和位置进行记录和输出以便于后续对缺陷进行修补。因此,本发明能够自动对船体焊缝的形态特征进行图像采集并根据采集到图像识别焊缝上是否存在缺陷,这使得本发明能够减少对船体焊缝缺陷进行检测的工作量,有助于提高船体焊缝缺陷检测的检测效率并减少检测时的安全隐患。
技术特征:
1.一种船体焊缝缺陷检测识别装置,其特征在于,包括:
2.如权利要求1所述的船体焊缝缺陷检测识别装置,其特征在于,所述移动机构(1)包括载板(11),所述载板(11)上具有移动电机、移动控制器和若干移动轮(12),所述移动控制器连接所述移动电机和所述工控主机,所述移动电机用于驱动全部或其中部分所述移动轮(12)转动,从而驱动所述载板(11)进行移动。
3.如权利要求1所述的船体焊缝缺陷检测识别装置,其特征在于,所述升降机构(2)包括机架(21)、升降平台(22)和升降驱动机构(23),所述升降平台(22)沿所述机架(21)高度方向滑动设置于所述机架(21)上,所述升降驱动机构(23)设置于所述机架(21)上并与所述升降平台(22)传动连接,所述升降驱动机构(23)用于驱动所述升降平台(22)沿所述机架(21)高度方向上下升降。
4.如权利要求3所述的船体焊缝缺陷检测识别装置,其特征在于,所述机架(21)沿其宽度两侧分别设置有导轨(213),所述升降平台(22)上具有与所述导轨滑动连接的滑块(221)。
5.如权利要求3所述的船体焊缝缺陷检测识别装置,其特征在于,所述升降驱动机构(23)包括丝杆(231)、升降螺母(232)、升降电机(233)和升降控制器,所述升降电机(233)与所述丝杆(231)传动连接,所述升降螺母(232)旋合于所述丝杆(231)上并与所述升降平台(22)连接,所述升降控制器连接所述升降电机(233)和所述工控主机。
6.如权利要求5所述的船体焊缝缺陷检测识别装置,其特征在于,所述升降电机(233)通过链传动机构(24)与所述丝杆(231)传动连接,所述链传动机构(24)包括主动链轮(241)、从动链轮(242)和传动链条,所述主动链轮(241)由升降电机(233)进行驱动,所述从动链轮(242)设置于所述丝杆(231)上,所述传动链条绕设于所述主动链轮(241)和所述从动链轮(242)上。
7.如权利要求1所述的船体焊缝缺陷检测识别装置,其特征在于,所述机械臂(31)为六轴工业机械臂。
8.如权利要求1所述的船体焊缝缺陷检测识别装置,其特征在于,所述检测组件(32)包括视觉传感器(321)和激光发射器(322),所述视觉传感器(321)为双目视觉传感器。
9.一种船体焊缝缺陷检测识别方法,其特征在于,其使用如权利要求1-8任一项所述的船体焊缝缺陷检测识别装置对船体焊缝缺陷进行检测,包括以下步骤:
10.如权利要求9所述的船体焊缝缺陷检测识别方法,其特征在于,所述检测组件(32)采集每条焊缝的图像时,所述工控主机会对所述激光发射器(322)射出的激光图像进行处理以得到激光图像中奇异点的位置坐标,并通过计算所述奇异点坐标与激光图像中心点坐标差值得到偏差量,所述工控主机根据所述偏差量控制所述机械臂(31)进行偏差补偿。
技术总结
本发明提供了一种船体焊缝缺陷检测识别装置及方法,所述船体焊缝缺陷检测识别装置包括移动机构、升降机构、检测机构和工控主机,所述升降机构设置于所述移动机构上,所述检测机构包括机械臂和检测组件,所述机械臂设置于所述升降机构上,所述检测组件设置于所述机械臂上,所述检测组件包括视觉传感器和激光发射器,所述工控主机分别连接所述移动机构、所述升降机构和所述检测机构。与现有技术相比,本发明能够自动对船体焊缝的形态特征进行图像采集并根据采集到图像识别焊缝上是否存在缺陷,从而能够减少对船体焊缝缺陷进行检测的工作量,这有助于提高船体焊缝缺陷检测的检测效率并减少检测时的安全隐患。
技术研发人员:初红艳,马旭辉,赵永胜,马锡盟,陈建洲,刘亚东
受保护的技术使用者:北京工业大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!