一种带扭矩闭环控制的雨刮电机耐久试验台的制作方法
本发明涉及一种带扭矩闭环控制的雨刮电机耐久试验台,该试验台基于对扭矩的大量数据采集、存取和算法,提升了雨刮电机耐久试验的准确性。
背景技术:
1、现在市场上的雨刮电机耐久试验台在采集电机扭矩时是基于工控机的时钟周期,设定触发器,在某个时间间隔内采集数据。该采集方法至少存在两种弊端:第一、由于雨刮电机在开展耐久试验时处于360度旋转状态或正反转状态,采集雨刮电机扭矩时,采集到的点位置不一样,采集到的扭矩也不一样;第二、由于采集到的扭矩波动大,如果要进行扭矩的闭环控制设计,显然在计算扭矩闭环的增益时就存在波动大的问题,而且,由于扭矩加载装置如磁粉制动器在长时间工作后,温度升高,加载扭矩降低明显,雨刮电机耐久试验在高速、低速状态下一般要进行150万次耐久试验,上述问题将会导致雨刮电机在做耐久试验时与磁粉制动器的耦合扭矩不够,降低了对雨刮电机的耐久性能考核。
2、现有雨刮电机耐久试验,开启雨刮电机的耐久试验时,在上位机的人机交互界面输入控制扭矩,如3.4n.m,同时输入扭矩控制范围,通过可编程控制器编程输出电压(输出电压范围是0~10v),再进一步控制数据可编程控制电源,数据可编程控制电源进行功率放大,再输出电压(输出电压范围是0~30v),该电压加到磁粉制动器上,这时,在理想状态下,雨刮电机在启动后获得的制动扭矩是3.4n.m,显然这是不现实的,也是现有设计的弊端,这时,就需要采用新的创新设计,主要包括:第一、利用逐次逼近法对控制过程中的传递因子进行精确设计。第二、基于对扭矩的大量试验数据采集、存取和均值处理,设定闭环控制周期,对控制扭矩进行闭环设计。
3、另一个问题,就是雨刮电机是360度旋转或在一定角度范围正反转的,现有的扭矩采集只能采集到一个旋转角度的扭矩,不能代表在旋转过程中的稳定扭矩,而且,当磁粉制造器在长时间工作后,由于受热,导致耦合扭矩的降低,从而导致雨刮电机在做耐久试验过程中负载降低了,也就是说降低了对雨刮电机耐久试验的考核。这也需要解决改进。
技术实现思路
1、为了改善以上问题,本发明提供了一种基于扭矩的大量数据采集、存取和算法,从而实现扭矩闭环控制的雨刮电机耐久试验台。
2、本发明的技术方案:
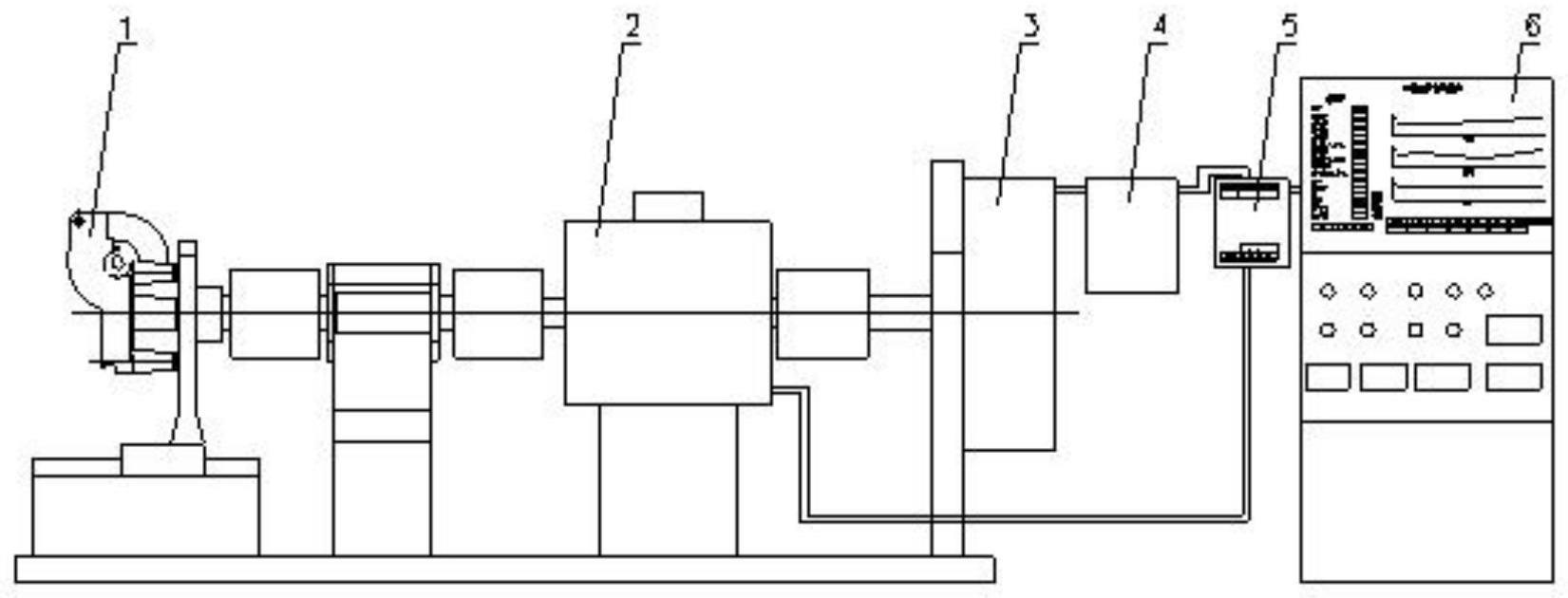
3、一种带扭矩闭环控制的雨刮电机耐久试验台,包括工作台,工作台上设电机座,电机座上安装雨刮电机,雨刮电机通过工作台上的机械结构与扭矩传感器连接,扭矩传感器与磁粉制动器连接,磁粉制动器与数据可编程控制电源连接,数据可编程控制电源与可编程控制器连接,可编程控制器与带人机交互界面的上位机连接;扭矩传感器还与可编程控制器连接。
4、进一步地:
5、1、利用逐次逼近法对扭矩试验台在控制过程中的传递因子进行精确设计:该扭矩试验台的控制过程为:对可编程控制器编制程序,输出数字量以控制该控制器输出0~10v电压控制数据可编程控制电源,数据可编程控制电源进行功率放大,输出0~30v电压控制磁粉制动器,磁粉制动器在与雨刮电机运行时耦合输出扭矩0~50n.m,扭矩传感器进行数据采集。从以上控制过程分析,整个控制过程是线性关系,故在可编程控制器编制程序输出数字量和扭矩传感器间建立数学模型为y=kx+b(其中y为可编程控制器实际输出数字量,x为扭矩值),按下表预设传递因子,在上位机的人机交互界面设定目标值n1=3.4n.m,n2=6.8n.m,依次逼近计算,最终确定k、b值,最后确定出该控制过程的线性方程y=kx+b:
6、第一次逼近后再采集扭矩值并计算k、b值,并逐次计算:
7、直到上位机(人机交互界面)设定目标值n1=3.4n.m、n2=6.8n.m与扭矩传感器2采集到实际值相等为n1=3.4n.m、n2=6.8n.m。
8、在完成了上述逼近法精确计算传递因子后,便确定了传递函数,y=1011x+3047,此时,如在上位机(人机交互界面)输入设定扭矩3.4n.m,保证磁粉制动器3与雨刮电机1在运行耦合时的扭矩最接近3.4n.m,或则说相对误差很小很小,输入5n.m时也取得了同样的效果,这样,便确保了该扭矩试验台的精准度。
9、2、扭矩采集的稳健性控制设计:
10、在完成控制过程中的传递因子精确设计以后,在雨刮电机360度旋转中任意点采集扭矩,当采集到无穷多的试验数据后,其平均值将稳定在某一个数值附近,同时对扭矩进行闭环设计将能解决雨刮电机1在耐久试验过程中加载的扭矩的稳定性;基于此,对雨刮电机的运行稳定性做了深刻分析和大量试验数据的采集,在前110s内,雨刮电机处于升温稳定期,采集的数据处于不稳定数据,予以剔除;控制器的记时器t180控制,从第280s时采集第二组的100个数据,依次采集4次,共采集400个试验数据;
11、3、利用存储器对大量数据进行采集存取并自动计算:
12、采用大循环嵌套小循环的采集和算法,其过程如下:利用10个存储器vd396、vd404、vd408、vd412、vd416、vd420、vd424、vd428、vd432、vd436在前10s,每1s一个存储器采集一个扭矩数据,共10个扭矩数据,完成采集后进行求和取平均值,并将10s内采集10个扭矩数据作为一个小循环,并依次将每个小循环采集到的10个数据的平均值传入vd452、vd456、vd460、vd464、vd468、vd472、vd476、vd480、vd484、vd488,最后再将vd452、vd456、vd460、vd464、vd468、vd472、vd476、vd480、vd484、vd488求和取平均值传vd492,最后再对该数字量进行计算得出扭矩值;
13、4、人机交互界面的智能化设计:
14、在试验开始时,根据试验标准要求,在人机交互界面输入设定扭矩值,并输入正负扭矩公差,当采集到的扭矩大于扭矩值+扭矩公差或低于扭矩值-扭矩公差时,编制控制程序,系统自动进行补偿;由于雨刮电机在运行后,一般需要在9~10分钟后才能进入稳定状态,故系统在9.6分钟时候进行计算再确定是否超过预定值,如超过就进行补偿;后面每间隔9.6分钟进行一次计算,并确定是否进行补偿,达到扭矩控制始终在扭矩要求的公差范围以内。
15、本发明基于对扭矩的大量数据采集、存取和算法,提升了雨刮电机耐久试验的准确性。
技术特征:
1.一种带扭矩闭环控制的雨刮电机耐久试验台,包括工作台,其特征在于:工作台上设电机座,电机座上安装雨刮电机(1),雨刮电机(1)通过工作台上的机械结构与扭矩传感器(2)连接,扭矩传感器(2)与磁粉制动器(3)连接,磁粉制动器(3)与数据可编程控制电源(4)连接,数据可编程控制电源(4)与可编程控制器(5)连接,可编程控制器(5)与带人机交互界面的上位机(6)连接;扭矩传感器(2)还与可编程控制器(5)连接;该试验台的控制过程为:对可编程控制器(5)编制程序,输出数字量以控制该控制器输出0~10v电压控制数据可编程控制电源(4),数据可编程控制电源(4)进行功率放大,输出0~30v电压控制磁粉制动器(3),磁粉制动器(3)在与雨刮电机(1)运行时耦合输出扭矩0~50n.m,扭矩传感器(2)进行数据采集。
2.如权利要求1所述的一种带扭矩闭环控制的雨刮电机耐久试验台,包括工作台,其特征在于:利用逐次逼近法对扭矩试验台在控制过程中的传递因子进行精确设计:
3.如权利要求2所述的一种带扭矩闭环控制的雨刮电机耐久试验台,包括工作台,其特征在于:扭矩采集的稳健性控制设计:
4.如权利要求3所述的一种带扭矩闭环控制的雨刮电机耐久试验台,包括工作台,其特征在于:利用存储器对大量数据进行采集存取并自动计算:
5.如权利要求4所述的一种带扭矩闭环控制的雨刮电机耐久试验台,包括工作台,其特征在于:人机交互界面的智能化设计:
技术总结
本发明公开了一种带扭矩闭环控制的雨刮电机耐久试验台,包括工作台,工作台上设电机座,电机座上安装雨刮电机,雨刮电机通过工作台上的机械结构与扭矩传感器连接,扭矩传感器与磁粉制动器连接,磁粉制动器与数据可编程控制电源连接,数据可编程控制电源与可编程控制器连接,可编程控制器与带人机交互界面的上位机连接;扭矩传感器还与可编程控制器连接。本发明对雨刮电机耐久试验台进行创新设计:第一、利用逐次逼近法对扭矩试验台在控制过程中的传递因子进行精确设计;第二、扭矩采集的稳健性控制设计;第三、利用存储器对大量数据进行采集存取并自动计算;第四、人机交互界面的智能化设计。
技术研发人员:卢振羽,成萍,唐仕红,田亮,李群,詹伟,田中强,计美
受保护的技术使用者:贵阳万江航空机电有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!