智慧环卫车辆可视化标段监管系统的制作方法
本发明涉及环卫车辆监管,具体地说,涉及智慧环卫车辆可视化标段监管系统。
背景技术:
1、环卫车辆是为环境卫生管理、市政道路维护和城区环卫而服务的专用汽车,主要用于城市环境卫生、垃圾管理站、城市道路、高速公路、小区环卫以及园林绿化带等地。
2、目前,环卫车辆作业过程不到位,作业路径偏离,作业效率不高及环卫车辆作业部分工作量不能量化随着智能技术以及定位技术的发展,在环卫车辆也会采用智能技术和定位技术,以对环卫车辆进行监管,但由于各个环卫车辆工作范围不一致,各个环卫车辆工作人员效率也不尽相同,导致监管过程较为繁琐,难以根据当前环卫车辆所处位置判断其是否处于正常工作状态,同时如果不能及时提醒其按照正常速度完成任务,就会影响后期的工作效率。
3、为了应对上述问题,现亟需一种智慧环卫车辆可视化标段监管系统。
技术实现思路
1、本发明的目的在于提供智慧环卫车辆可视化标段监管系统,以解决上述背景技术中提出的问题。
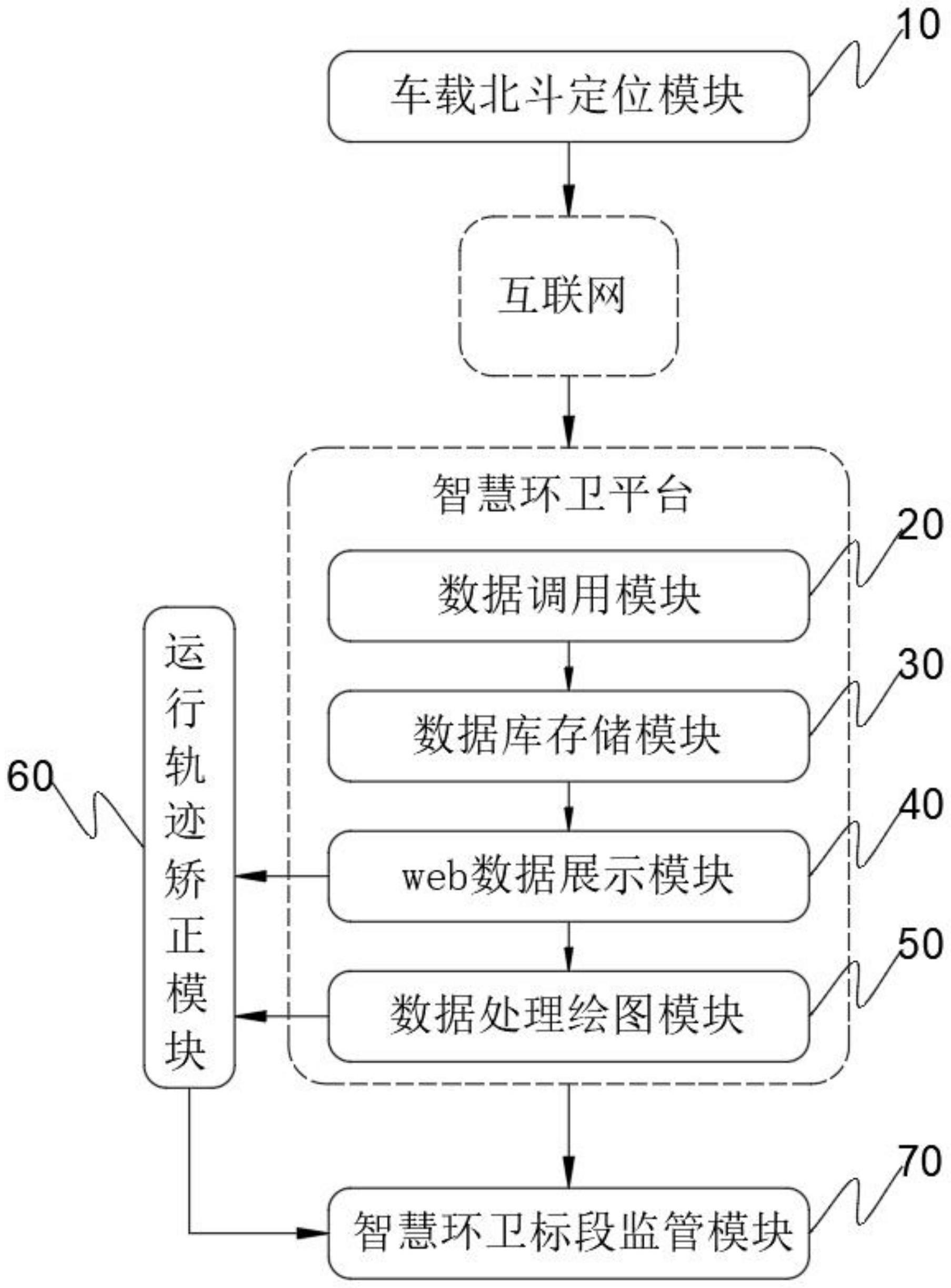
2、为实现上述目的,提供了智慧环卫车辆可视化标段监管系统,包括车载北斗定位模块,所述车载北斗定位模块用于实时调取天空中卫星传下来的星历,并对星历进行解析,随后将解析数据传输至互联网,所述车载北斗定位模块加装在智慧环卫车辆上,所述车载北斗定位模块输出端连接有智慧环卫平台,所述智慧环卫平台包括数据调用模块;
3、所述数据调用模块用于调取互联网的数据,所述数据调用模块输出端连接有数据库存储模块;
4、所述数据库存储模块用于对调取互联网数据进行存储,生成存储数据,所述数据库存储模块输出端连接有web数据展示模块;
5、所述web数据展示模块在web展示存储数据,所述web数据展示模块输出端连接有数据处理绘图模块;
6、所述数据处理绘图模块根据web展示的存储数据,对数据进行对轨迹的距离与速度计算,并对轨迹进行图像绘制,确定环卫车辆实时移动状态以及实时移动速度,得出实时路段点;
7、所述数据处理绘图模块输出端连接有运行轨迹矫正模块,所述运行轨迹矫正模块输入端与所述web数据展示模块输出端连接,所述运行轨迹矫正模块用于确定环卫车辆当天工作运行轨迹、完成工作所花费的时间以及平均行驶速度,确定出不同时间点环卫车辆所处路段规定范围,并与实时路段点进行比对,判断出监管的环卫车辆是否处于正常运作状态。
8、作为本技术方案的进一步改进,所述车载北斗定位模块包括星历数据调用单元,所述星历数据调用单元用于实时调取天空中卫星传下来的星历,所述星历数据调用单元输出端连接有协议解析单元,所述协议解析单元用于采用星历数据协议,对星历数据进行解析,得到互联网能够辨识的解析数据,所述协议解析单元输出端连接有数据上传单元,所述数据上传单元用于将解析数据上传至互联网。
9、作为本技术方案的进一步改进,所述协议解析单元中对星历数据解析方法包括如下步骤:
10、s1、接收星历数据,按照nema协议对星历数据进行解析,得到nema协议数据;
11、s2、编写gpsservice线程,通过gpsservice线程对nema协议数据进行处理;
12、s3、通过android的handler将数据传给其它数据处理的线程。
13、作为本技术方案的进一步改进,所述数据上传单元采用netty网络进行数据传输。
14、作为本技术方案的进一步改进,所述s3中的线程为网络封包线程,封装成jt808的协议。
15、作为本技术方案的进一步改进,所述数据调用模块包括数据辨识单元,所述数据辨识单元根据智慧环卫车辆的ip及端口号,用于辨识出智慧环卫车辆的nema协议数据,所述数据辨识单元输出端连接有无关数据剔除单元。
16、作为本技术方案的进一步改进,所述数据库存储模块采用mysql数据库进行数据存储,将不同数据分别存储。
17、作为本技术方案的进一步改进,所述数据处理绘图模块采用javascript的绘图机制进行轨迹图像绘制,其绘制方法包括如下步骤:
18、步骤一、取出mysql数据库的数据,取出的数据保留有存储、查询、删除的功能;
19、步骤二、取出数据后,进行标点,javascript绘图机制绘出环卫车辆的轨迹;
20、步骤三、通过绘图机制绘出环卫车辆的轨迹,得出环卫车辆的距离与速度。
21、作为本技术方案的进一步改进,所述智慧环卫平台输出端连接有智慧环卫标段监管模块,所述智慧环卫标段监管模块用于对车辆运行过程中的距离、速度以及时长进行统一展示。
22、作为本技术方案的进一步改进,所述智慧环卫标段监管模块的输入端与所述运行轨迹矫正模块输出端连接,所述智慧环卫标段监管模块用于对监管环卫车辆实时矫正状态进行统一展示。
23、与现有技术相比,本发明的有益效果:
24、1、该智慧环卫车辆可视化标段监管系统中,通过车载北斗定位模块实时调取天空中卫星传下来的星历,并对星历进行解析,数据处理绘图模块根据web展示的存储数据,对数据进行对轨迹的距离与速度计算,运行轨迹矫正模块确定环卫车辆当天工作运行轨迹、完成工作所花费的时间以及平均行驶速度,确定出不同时间点环卫车辆所处路段规定范围,并与实时路段点进行比对,能够确定环卫车辆的具体的作业的位置与坐标,确定环卫车辆是否处于作业中,以及当前所监管的环卫车辆是否能够在规定时间内完成任务,及时对异常的环卫车辆进行位置矫正处理。
25、2、该智慧环卫车辆可视化标段监管系统中,数据上传单元通过netty网络进行数据传输,解决网络的粘包、多包等技术问题,设置网络的外网的ip地址、端口号及超时机制等,对于网络离线及信号不太强,相对较弱的情况,使用补传、重传等方法,上报数据。
26、3、该智慧环卫车辆可视化标段监管系统中,数据库存储模块采用mysql数据库进行数据存储,mysql是一种关系型数据库管理系统,关系数据库将数据保存在不同的表中,而不是将所有数据放在一个大仓库内,从而对不同数据进行分类储存,提高整个数据的存储效率以及存储灵活度。
27、4、该智慧环卫车辆可视化标段监管系统中,数据处理绘图模块根据web展示的存储数据,对数据进行对轨迹的距离与速度计算,并对轨迹进行图像绘制,确定环卫车辆实时移动状态以及实时移动速度,得出实时路段点,随后通过智慧环卫标段监管模块对车辆运行过程中的距离、速度以及时长进行统一展示,清晰展示出车辆在什么位置的作业状态,统计出车辆作业的速度。
技术特征:
1.智慧环卫车辆可视化标段监管系统,其特征在于:包括车载北斗定位模块(10),所述车载北斗定位模块(10)用于实时调取天空中卫星传下来的星历,并对星历进行解析,随后将解析数据传输至互联网,所述车载北斗定位模块(10)加装在智慧环卫车辆上,所述车载北斗定位模块(10)输出端连接有智慧环卫平台,所述智慧环卫平台包括数据调用模块(20);
2.根据权利要求1所述的智慧环卫车辆可视化标段监管系统,其特征在于:所述车载北斗定位模块(10)包括星历数据调用单元(110),所述星历数据调用单元(110)用于实时调取天空中卫星传下来的星历,所述星历数据调用单元(110)输出端连接有协议解析单元(120),所述协议解析单元(120)用于采用星历数据协议,对星历数据进行解析,得到互联网能够辨识的解析数据,所述协议解析单元(120)输出端连接有数据上传单元(130),所述数据上传单元(130)用于将解析数据上传至互联网。
3.根据权利要求2所述的智慧环卫车辆可视化标段监管系统,其特征在于:所述协议解析单元(120)中对星历数据解析方法包括如下步骤:
4.根据权利要求2所述的智慧环卫车辆可视化标段监管系统,其特征在于:所述数据上传单元(130)采用netty网络进行数据传输。
5.根据权利要求3所述的智慧环卫车辆可视化标段监管系统,其特征在于:所述s3中的线程为网络封包线程,封装成jt808的协议。
6.根据权利要求1所述的智慧环卫车辆可视化标段监管系统,其特征在于:所述数据调用模块(20)包括数据辨识单元(210),所述数据辨识单元(210)根据智慧环卫车辆的ip及端口号,用于辨识出智慧环卫车辆的nema协议数据,所述数据辨识单元(210)输出端连接有无关数据剔除单元(220)。
7.根据权利要求1所述的智慧环卫车辆可视化标段监管系统,其特征在于:所述数据库存储模块(30)采用mysql数据库进行数据存储,将不同数据分别存储。
8.根据权利要求1所述的智慧环卫车辆可视化标段监管系统,其特征在于:所述数据处理绘图模块(50)采用javascript的绘图机制进行轨迹图像绘制,其绘制方法包括如下步骤:
9.根据权利要求1所述的智慧环卫车辆可视化标段监管系统,其特征在于:所述智慧环卫平台输出端连接有智慧环卫标段监管模块(70),所述智慧环卫标段监管模块(70)用于对车辆运行过程中的距离、速度以及时长进行统一展示。
10.根据权利要求9所述的智慧环卫车辆可视化标段监管系统,其特征在于:所述智慧环卫标段监管模块(70)的输入端与所述运行轨迹矫正模块(60)输出端连接,所述智慧环卫标段监管模块(70)用于对监管环卫车辆实时矫正状态进行统一展示。
技术总结
本发明涉及环卫车辆监管技术领域,具体地说,涉及智慧环卫车辆可视化标段监管系统。其包括车载北斗定位模块、智慧环卫平台以及运行轨迹矫正模块。本发明通过车载北斗定位模块实时调取天空中卫星传下来的星历,并对星历进行解析,数据处理绘图模块根据web展示的存储数据,对数据进行对轨迹的距离与速度计算,运行轨迹矫正模块确定环卫车辆当天工作运行轨迹、完成工作所花费的时间以及平均行驶速度,确定出不同时间点环卫车辆所处路段规定范围,并与实时路段点进行比对,能够确定环卫车辆的具体的作业的位置与坐标,确定环卫车辆是否处于作业中,以及当前所监管的环卫车辆是否能够在规定时间内完成任务,及时对异常的环卫车辆进行位置矫正处理。
技术研发人员:张温刚,李允,李英豪,段志权,晏坤
受保护的技术使用者:湖南艾依灵科技有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!