基于SLAM导航地图和CAD建筑图的车库导航系统的制作方法
本发明涉及计算机建图定位领域,特别是涉及基于slam导航地图和cad建筑图的车库导航系统。
背景技术:
1、移动充电机器人可以在车库中对用户指定的车进行充电操作,现有的实现过程为:在用户输入车位号以后,人工在移动充电机器人的slam导航地图中标注与上述车位号对应的位置,移动充电机器人将上述位置作为目标点进行路径规划,到达上述目标点后对车进行充电。现有的这种实现过程依赖人工在slam导航地图中标注与车位号对应的位置,给人工带来了较大的工作量,且人工标注也容易出现标注错误的情况,导致移动充电机器寻找充电车辆时存在定位偏差的问题。
技术实现思路
1、本发明目的在于,提供基于slam导航地图和cad建筑图的车库导航系统,解决了现有依赖人工在slam导航地图中标注与车位号对应的位置的方法存在的人工工作量较大和人工标注容易出现标注错误的问题,提高了移动充电机器寻找充电车辆时的定位准确性。
2、根据本发明,提供了一种基于slam导航地图和cad建筑图的车库导航系统,包括存储器,所述存储器存储有目标车库的目标slam导航地图,所述目标slam导航地图中标注有各停车区域对应的id,所述目标slam导航地图的获取方法包括:
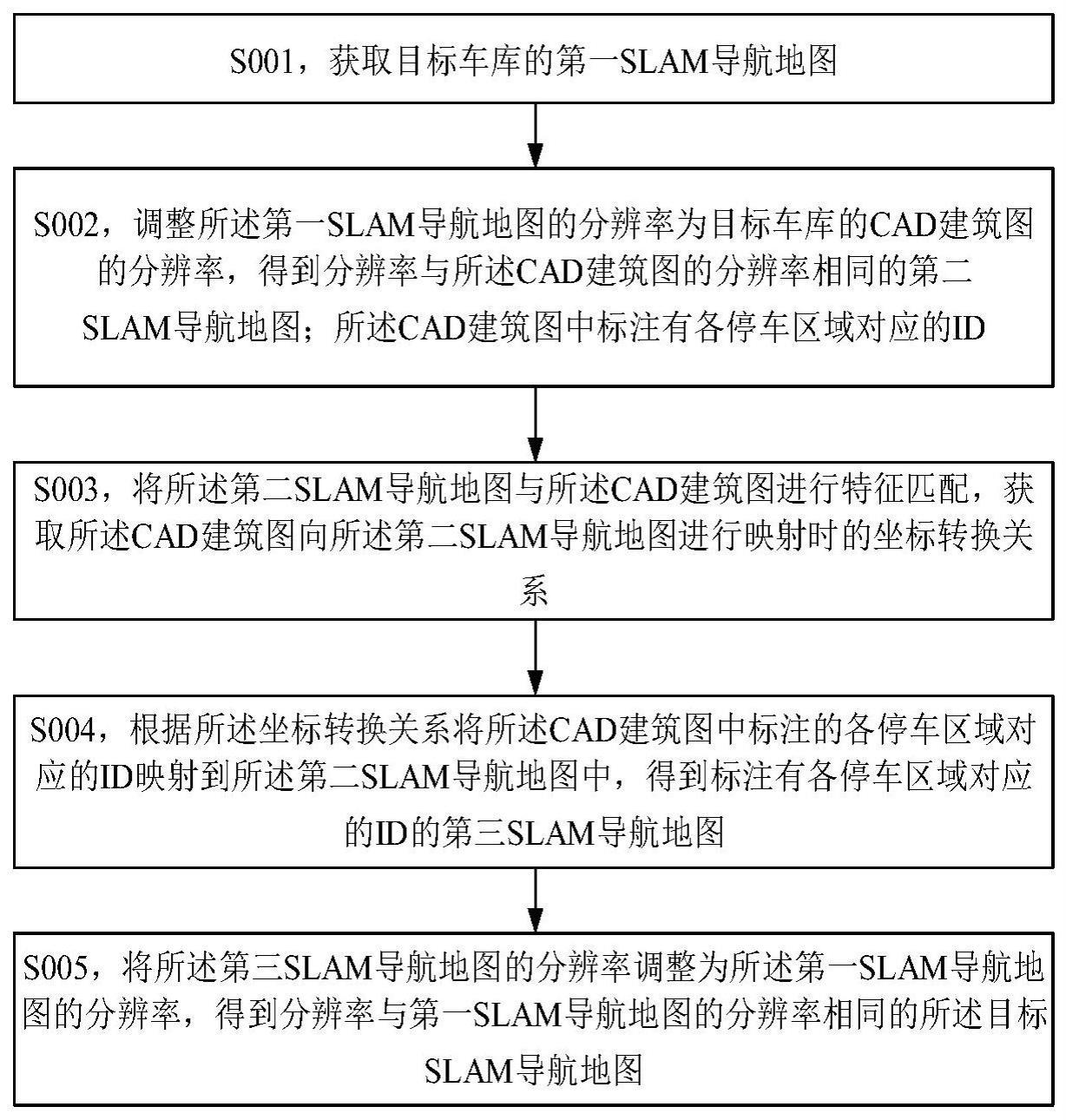
3、s001,获取目标车库的第一slam导航地图。
4、s002,调整所述第一slam导航地图的分辨率为目标车库的cad建筑图的分辨率,得到分辨率与所述cad建筑图的分辨率相同的第二slam导航地图;所述cad建筑图中标注有各停车区域对应的id。
5、s003,将所述第二slam导航地图与所述cad建筑图进行特征匹配,获取所述cad建筑图向所述第二slam导航地图进行映射时的坐标转换关系。
6、s004,根据所述坐标转换关系将所述cad建筑图中标注的各停车区域对应的id映射到所述第二slam导航地图中,得到标注有各停车区域对应的id的第三slam导航地图。
7、s005,将所述第三slam导航地图的分辨率调整为所述第一slam导航地图的分辨率,得到分辨率与第一slam导航地图的分辨率相同的所述目标slam导航地图。
8、所述系统还包括处理器和存储有计算机程序的存储介质,当所述计算机程序被处理器执行时,实现以下步骤:
9、s100,获取用户输入的id。
10、s200,获取目标slam导航地图中与所述用户输入的id匹配的停车区域的坐标。
11、s300,将所述坐标作为目标点进行路径规划。
12、本发明与现有技术相比具有明显的有益效果,借由上述技术方案,本发明提供的基于slam导航地图和cad建筑图的车库导航系统可达到相当的技术进步性及实用性,并具有产业上的广泛利用价值,其至少具有以下有益效果:
13、本发明基于带有目标车库各停车区域对应的id的cad建筑图对目标车库的第一slam导航地图进行了多步骤处理,最终得到了标注有各停车区域对应的id的目标slam导航地图。本发明实现了对slam导航地图上各停车区域对应id的自动标注,在此基础上,移动充电机器人再执行用户下发的充电指令时就无需再由人工进行充电位置标注,解决了现有依赖人工在slam导航地图中标注与车位号(即停车区域对应的id)对应的位置的方法存在的人工工作量较大和人工标注容易出现标注错误的问题,提高了移动充电机器人充电时的定位准确性。
技术特征:
1.一种基于slam导航地图和cad建筑图的车库导航系统,其特征在于,包括存储器,所述存储器存储有目标车库的目标slam导航地图,所述目标slam导航地图中标注有各停车区域对应的id,所述目标slam导航地图的获取方法包括:
2.根据权利要求1所述的系统,其特征在于,s004中,所述根据所述坐标转换关系将所述cad建筑图中标注的各停车区域对应的id映射到所述第二slam导航地图中,包括:
3.根据权利要求1所述的系统,其特征在于,s003中,所述将所述第二slam导航地图与所述cad建筑图进行特征匹配,获取所述cad建筑图向所述第二slam导航地图进行映射时的坐标转换关系,包括:
4.根据权利要求3所述的系统,其特征在于,s0034中,所述根据所述匹配关系获取所述cad建筑图向所述第二slam导航地图进行映射时的坐标转换关系,包括:
5.根据权利要求4所述的系统,其特征在于,s00342中,所述第二slam导航地图中与li匹配的直线根据所述第二slam导航地图中各直线与li的长度差值以及所述第二slam导航地图中各直线相对目标车库中心位置的相对位置关系得到。
6.根据权利要求4所述的系统,其特征在于,s00344中,所述cad建筑图向所述第二slam导航地图进行映射时的坐标转换关系为所述第i坐标转换关系与所述cad建筑图中除li以外的其他直线对应的坐标转换关系的平均坐标转换关系。
7.根据权利要求1所述的系统,其特征在于,s001中,通过激光雷达获取目标车库的第一slam导航地图。
技术总结
本申请涉及计算机建图定位领域,特别是涉及基于SLAM导航地图和CAD建筑图的车库导航系统,所述系统包括存储器,所述存储器存储有目标车库的目标SLAM导航地图,所述目标SLAM导航地图中标注有各停车区域对应的ID;所述系统还包括处理器和存储有计算机程序的存储介质,当所述计算机程序被处理器执行时,实现以下步骤:S100,获取用户输入的ID;S200,获取目标SLAM导航地图中与所述用户输入的ID匹配的停车区域的坐标;S300,将所述坐标作为目标点进行路径规划。本发明实现了对SLAM导航地图上各停车区域对应ID的自动标注,解决了人工标注容易出现标注错误的问题。
技术研发人员:夹磊,邓晓光,吴天,欧龙辉,梁元波,赵允喜
受保护的技术使用者:国广顺能(上海)能源科技有限公司
技术研发日:
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!