用于确定农业作业车辆的被驱动路径的农业系统和方法与流程
本公开总体上涉及农业作业车辆,并且更具体地,涉及用于确定农业作业车辆在田地中第一次通行期间的被驱动路径(as-driven path)的农业系统和方法。
背景技术:
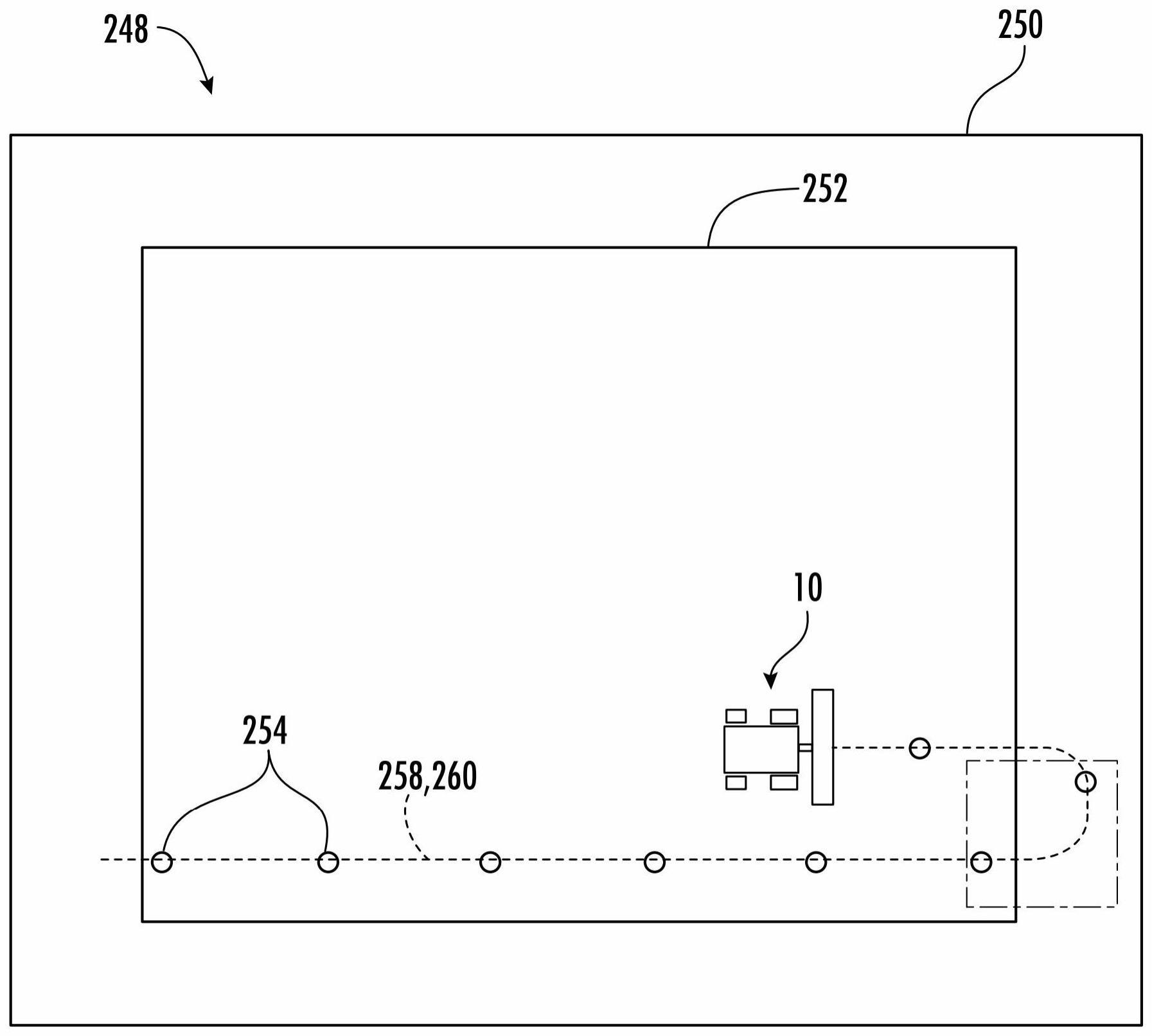
1、农业车辆的操作正变得越来越自动化。例如,收割机、播种机、耕作机等现在常常被配置为针对各种应用自主地或半自主地操作。自主车辆可以被配置成跟随可以由人类操作者驾驶的引导车辆。例如,引导车辆可以被驱动以跨田地第一次通行,而引导车辆的移动可以被记录为被驱动路径,并被用于控制自主车辆或跟随车辆进行后续的跨田地通行。然而,通常情况下,仅递增地获取位置数据(诸如由全球定位系统(gps)生成的数据),使得需要进行插值来确定位置数据的点之间的被驱动路径。当位置数据点分开较远时,被驱动路径的准确性较低。在某些情况下,经插值的被驱动路径甚至可能是不可驱动的。增加位置数据收集的频率增加了被驱动路径的准确性,但显著增加了生成被驱动路径的存储需求和时间。
2、因此,在本技术中将欢迎用于确定农业作业车辆的被驱动路径的改进的农业系统和方法。
技术实现思路
1、本发明的方面和优点将在下面的描述中部分地阐述,或者可以根据描述而变得清楚,或者可以通行实践本发明而获知。
2、在一方面,本发明主题涉及一种用于确定农业作业车辆的被驱动路径的方法。所述方法可以包括利用计算系统接收由位置传感器生成的位置数据,所述位置数据指示所述农业作业车辆在田地中第一次通行期间所述农业作业车辆在所述田地中的位置。类似地,所述方法可以包括利用所述计算系统接收在第一次通行期间由所述农业作业车辆上支撑的惯性测量单元imu生成的惯性移动数据。另外,所述方法可以包括利用所述计算系统接收指示在第一次通行期间所述农业作业车辆的车轮的转向角、所述农业作业车辆的车轮的车轮速度或所述农业作业车辆的传动速度中的至少一个的操作数据。此外,所述方法可以包括利用所述计算系统至少部分地基于所述位置数据、所述惯性移动数据和所述操作数据来生成所述农业作业车辆在第一次通行期间的被驱动路径。另外,所述方法可以包括利用所述计算系统至少部分地基于所述农业作业车辆的被驱动路径来执行控制动作。
3、在另一方面,本发明主题涉及一种用于确定农业作业车辆的被驱动路径的系统。所述系统可以包括定位设备,所述定位设备被配置为生成指示所述农业作业车辆在田地中的位置的位置数据。所述系统可以包括惯性测量单元(imu),所述imu被支撑在所述农业作业车辆上,其中所述imu被配置为生成所述农业作业车辆的惯性移动数据。此外,所述系统可以包括非位置传感器,所述非位置传感器被配置为生成指示所述农业作业车辆的车轮的转向角、所述农业作业车辆的车轮的车轮速度或所述农业作业车辆的传动速度中的至少一个的操作数据。另外,所述系统可以包括与所述定位设备、所述imu和所述非位置传感器通信联接的计算系统。所述计算系统可以被配置为:从所述位置传感器接收位置数据,所述位置数据指示所述农业作业车辆在所述田地中的第一次通行期间所述农业作业车辆在所述田地中的位置;在第一次通行期间从所述imu接收所述惯性移动数据;以及在第一次通行期间从所述非位置传感器接收所述操作数据。所述计算系统还可以被配置为至少部分地基于所述位置数据、所述惯性移动数据和所述操作数据来生成所述农业作业车辆在第一次通行期间的被驱动路径。
4、参考以下描述和所附权利要求书,本发明的这些和其他特征、方面和优点将变得更好理解。并入且构成本说明书的一部分的附图图示了本发明的实施例,并与描述一起用于说明本发明的原理。
技术特征:
1.一种用于确定农业作业车辆的被驱动路径的方法,所述方法包括:
2.根据权利要求1所述的方法,其中,至少部分地基于所述位置数据、所述惯性移动数据和所述操作数据来生成所述农业作业车辆在第一次通行期间的被驱动路径包括:
3.根据权利要求2所述的方法,其中,确定所述农业作业车辆的滑移包括确定所述惯性移动数据与所述操作数据之间的差值。
4.根据权利要求3所述的方法,其中,所述操作数据是所述农业作业车辆的车轮的转向角。
5.根据权利要求1所述的方法,其中,所述位置数据指示以特定间隔为增量的所述农业作业车辆在所述田地中的位置,其中,所述农业作业车辆的被驱动路径至少部分地基于所述惯性移动数据和所述操作数据来直接连接所述农业作业车辆在所述田地中的位置中的相邻位置。
6.根据权利要求1所述的方法,其中,所述控制动作包括至少部分地基于所述农业作业车辆在所述第一次通行期间的被驱动路径来控制后续农业作业车辆进行在所述田地中的后续通行。
7.根据权利要求1所述的方法,其中,所述控制动作包括控制用户界面,以显示所述农业作业车辆的被驱动路径。
8.根据权利要求1所述的方法,其中,生成所述农业作业车辆在第一次通行期间的被驱动路径包括在正在执行第一次通行时,生成所述农业作业车辆在第一次通行期间的被驱动路径。
9.根据权利要求1所述的方法,其中,生成所述农业作业车辆在第一次通行期间的被驱动路径包括至少部分地基于所述位置数据、所述惯性移动数据、所述操作数据以及指示所述田地的一个或更多个边界的田地参数数据来生成所述农业作业车辆在第一次通行期间的被驱动路径。
10.一种用于确定农业作业车辆的被驱动路径的系统,所述系统包括:
11.根据权利要求10所述的系统,其中,所述计算系统被配置为通行以下步骤至少部分地基于所述位置数据、所述惯性移动数据和所述操作数据来生成所述农业作业车辆在第一次通行期间的被驱动路径:
12.根据权利要求11所述的系统,其中,所述计算系统被配置为通过确定所述惯性移动数据与所述操作数据之间的差值来确定所述农业作业车辆的滑移。
13.根据权利要求12所述的系统,其中,所述操作数据是所述农业作业车辆的车轮的转向角。
14.根据权利要求10所述的系统,其中,所述位置数据指示以特定间隔为增量的所述农业作业车辆在所述田地中的位置,其中,所述农业作业车辆的被驱动路径至少部分地基于所述惯性移动数据和所述操作数据来直接连接所述农业作业车辆在所述田地中的位置中的相邻位置。
15.根据权利要求10所述的系统,其中,所述计算系统被进一步配置为至少部分地基于所述农业作业车辆的被驱动路径来执行控制动作。
16.根据权利要求15所述的系统,其中,所述控制动作包括至少部分地基于所述农业作业车辆在所述第一次通行期间的被驱动路径来控制后续农业作业车辆在所述田地中进行后续通行。
17.根据权利要求15所述的系统,其中,所述控制动作包括控制用户界面以显示所述农业作业车辆的被驱动路径。
18.根据权利要求10所述的系统,其中,所述计算系统被配置为在正在执行第一次通行时,生成所述农业作业车辆在第一次通行期间的被驱动路径。
19.根据权利要求10所述的系统,其中,所述计算系统还被配置为接收指示所述田地的一个或更多个边界的田地参数数据,并且
技术总结
本公开涉及用于确定农业作业车辆的被驱动路径的农业系统和方法。一种用于确定农业作业车辆的被驱动路径的方法包括:接收指示农业作业车辆在田地中第一次通行期间农业作业车辆在所述田地中的位置的位置数据;接收农业作业车辆在第一次通行期间的惯性移动数据;以及接收指示在第一次通行期间农业作业车辆的车轮的转向角、农业作业车辆的车轮的车轮速度或农业作业车辆的传动速度中的至少一个的操作数据。此外,该方法包括至少部分地基于位置数据、惯性移动数据和操作数据来生成农业作业车辆在第一次通行期间的被驱动路径。另外,该方法包括基于被驱动路径来执行控制动作。
技术研发人员:P·D·迪克斯,D·盖耶,A·赛恩,N·古拉蒂
受保护的技术使用者:凯斯纽荷兰工业(哈尔滨)机械有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!