一种天基全空域扫描巡查相机及方法与流程
本发明涉及天基空间目标监测领域,具体涉及一种天基全空域扫描巡查相机及方法。
背景技术:
1、天基可视传感器是天基空间目标监测系统最为常用的观测设备。相比于红外、微波雷达和激光等手段,天基可视传感器在技术成熟性、使用范围、功耗等方面具有明显优势。因此,美国、俄罗斯和欧洲等国家已经将可见光传感器广泛应用于天基监测系统中。
2、我国在轨运行的空间站,雷达成像、光学成像等高价值卫星,以及正在构建中的二代导航等空间卫星体系,在未来在轨运行中,面临空间碎片、死亡卫星等多类威胁,针对高价值卫星在轨安全性的提升迫在眉睫。国内针对空间飞行器的自卫防护技术研究相较于国外起步较晚,目前主要的空间碎片监视手段仍以地基设备为主。我国积极发展天基空间碎片监视载荷,对重点卫星开始配置星上光学监测系统进行空间碎片威胁预警和安全规避,但目前仍处于起步阶段。
3、研究二维机构驱动的轻小型全空域扫描巡查相机应对飞行器周围全空域内空间碎片的搜捕、监测、威胁预警等问题,有助于提高我国空间资产的安全保障能力。
技术实现思路
1、本发明的目的在于提供一种天基全空域扫描巡查相机及方法,能够满足轻小型化、高精度、大视场、全空域探测的使用要求,具有对飞行器的轨道面内重点空域覆盖及全空域覆盖两种模式,可实现对飞行器周围全空域内空间碎片的搜捕、监测和威胁预警。
2、为实现上述目的,本发明通过以下技术方案实现:
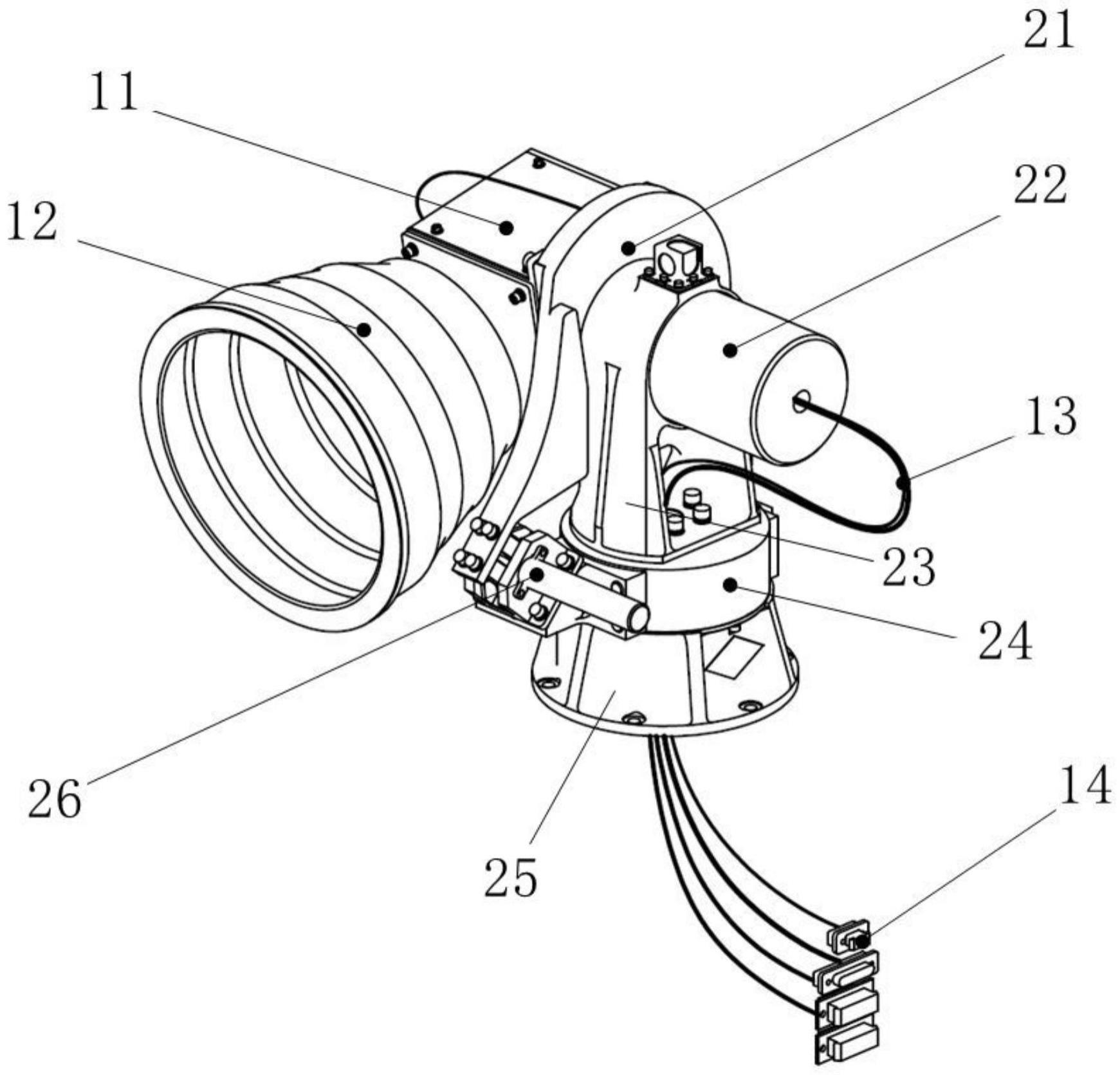
3、一种天基全空域扫描巡查相机,设置在飞行器上,用于实现所述飞行器周围的空域扫描巡查;其包括:
4、相机单元,与所述飞行器电连接,用于按照所述飞行器的指令进行其视场范围内的光学测量和图像处理,并将处理后的巡查图像发送给所述飞行器;
5、二维机构单元,与所述相机单元和飞行器分别连接,与所述飞行器电连接,用于支撑所述相机单元,以及按照所述飞行器的控制指令带动相机单元调整扫描角度,以按照设定的工作模式和扫描规划路线对目标区域进行扫描探测。
6、优选地,所述相机单元包括:
7、设有镜头孔的机壳,其内部为设备腔,所述机壳的其中一侧壁为用于与二维机构单元固定的安装面;
8、cmos探测器,与所述飞行器电连接,包括设置在所述镜头孔内的镜头和设备腔内的处理器,所述镜头能够采集其视场范围内的光学信息,所述处理器接收飞行器的指令进行拍摄,对所述镜头所采集的光学信息进行图像处理生成巡查图像。
9、优选地,所述二维机构单元包括:
10、固定座,与所述飞行器连接,用于与所述飞行器固定。
11、方位轴,包括可相对旋转的外壳和内轴,其内轴与固定座固定,用于调整所述相机单元的镜头光轴的水平角;
12、转动轴连接架,底端与所述方位轴的外壳固定,能够在所述方位轴的外壳的带动下水平旋转,用于传递力矩;
13、俯仰轴,包括可相对旋转的外壳和内轴,其外壳与转动轴连接架的顶端固定,用于调整相机单元镜头光轴的俯仰角;
14、相机安装盘,用于固定所述相机单元,其一侧与所述俯仰轴的内轴固定,另一侧与所述相机单元的机壳的安装面固定。
15、优选地,所述二维机构单元还包括:
16、热刀,能够根据需要同时锁紧或释放所述方位轴和俯仰轴,从而为所述相机单元提供高稳定度、高精度的支撑。
17、优选地,所述cmos探测器的处理器安装在设备腔内靠近安装面的位置,所述机壳的安装面与相机安装盘之间涂有导热硅脂;
18、所述相机安装盘面积大于机壳的安装面,且扩展为圆盘形散热面。
19、优选地,所述相机单元还包括遮光罩,环绕所述镜头孔固定在机壳的外壁上,用于阻止成像角之外的光线摄入镜头;所述遮光罩与机壳隔热安装。
20、优选地,所述相机单元还包括相机电缆,其一端与所述cmos探测器的处理器电连接,另一端与所述飞行器电连接,用于将所述飞行器的控制命令发送给cmos探测器,以及将所述cmos探测器的处理器生成的巡查图像发送给飞行器;
21、所述方位轴和俯仰轴设有沿轴线延伸的中心孔,所述相机电缆通过方位轴和俯仰轴的中心孔穿过方位轴和俯仰轴,在所述二维机构单元轴系转动时与之共轴运动。
22、一种轨道面重点空域巡查方法,基于上述任意一种巡查相机实现,包括步骤:
23、巡查相机的方位轴锁定,将镜头光轴的方位角固定为0°;
24、俯仰轴转动,将镜头光轴在75°→45°→15°→-15°→-45°→-75°共6个俯仰角阵位驻留,驻留期间进行天文校准和拍图;
25、周期往复循环,完成轨道面内重点空域覆盖。
26、一种全空域巡查方法,基于上述任意一种巡查相机实现,包括步骤:
27、巡查相机的方位轴转动,将镜头光轴的方位角依次固定为75°、15°、-45°并分别驻留;
28、在每个方位角的驻留期间,俯仰轴转动,将镜头光轴在75°→45°→15°→-15°→-45°→-75°共6个俯仰角阵位驻留,驻留期间进行天文校准和拍图,完成一半全空域覆盖。
29、优选地,还包括步骤:
30、巡查相机的方位轴转动,将镜头光轴的方位角依次固定为45°、-15°、-75°并分别驻留;
31、在每个方位角的驻留期间,俯仰轴转动,将镜头光轴在75°→45°→15°→-15°→-45°→-75°共6个俯仰角阵位驻留,驻留期间进行天文校准和拍图,完成另一半全空域覆盖,二者组合完成全空域覆盖;
32、方位轴、俯仰轴转动期间不拍图。
33、综上所述,与现有技术相比,本发明提供的一种天基全空域扫描巡查相机及方法,具有如下有益效果:
34、1、通过二维机构单元带动一台大视场cmos相机进行俯仰、方位扫描,实现了全空域视场覆盖的需求;
35、2、通过优化相机电缆穿轴方式、相机散热路径,保证了巡查相机的良好工作环境,提升了巡查相机的可靠性和适应性;
36、3、通过采用方位轴竖直、俯仰轴水平的构型,相机单元安装在二维机构单元的俯仰轴上且重心落在方位轴上,便于相机光轴的标较和测量;
37、4、整机采用模块化设计思想,各模块可方便替换。
技术特征:
1.一种天基全空域扫描巡查相机,设置在飞行器上,用于实现所述飞行器周围的空域扫描巡查;其特征在于,其包括:
2.如权利要求1所述的巡查相机,其特征在于,所述相机单元包括:
3.如权利要求2所述的巡查相机,其特征在于,所述二维机构单元包括:
4.如权利要求3所述的巡查相机,其特征在于,所述二维机构单元还包括:
5.如权利要求3所述的巡查相机,其特征在于,
6.如权利要求1所述的巡查相机,其特征在于,
7.如权利要求3所述的巡查相机,其特征在于,
8.一种轨道面重点空域巡查方法,其特征在于,基于如权利要求1~7任意一项所述的巡查相机实现,包括步骤:
9.一种全空域巡查方法,其特征在于,基于如权利要求1~7任意一项所述的巡查相机实现,包括步骤:
10.如权利要求9所述的全空域巡查方法,其特征在于,还包括步骤:
技术总结
本发明提供一种天基全空域扫描巡查相机及方法,用于实现所述飞行器周围的空域扫描巡查。其中,所述天基全空域扫描巡查相机包括:相机单元,与所述飞行器电连接,用于按照所述飞行器的指令进行其视场范围内的光学测量和图像处理;二维机构单元,与所述相机单元和飞行器分别连接,与所述飞行器电连接,用于支撑所述相机单元,以及按照所述飞行器的控制指令带动相机单元调整扫描角度,以按照设定的工作模式和扫描规划路线对目标区域进行扫描探测。本发明能够满足轻小型化、高精度、大视场、全空域探测的使用要求,具有对飞行器的轨道面内重点空域覆盖及全空域覆盖两种模式,可实现对飞行器周围全空域内空间碎片的搜捕、监测和威胁预警。
技术研发人员:宋卿争,毛晓楠,任平川,高文杰,关涛
受保护的技术使用者:上海航天控制技术研究所
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!