一种一体化惯性测量模块及惯性测量单元的制作方法
本发明属于惯性测量,具体涉及一种一体化惯性测量模块及惯性测量单元。
背景技术:
1、惯性测量单元主要用于实时测量载体加速度和角速度信息,以确定载体速度、位置和姿态,目前已广泛应用于潜艇、舰船、导弹和各类军用飞机等军事领域以及船舶航行、海洋开发、大地测量、石油钻井、无人机等诸多民用领域。
2、惯性测量单元包括三个陀螺、三个加速度计和一个i/f转换模块。其中,三个陀螺能够提供载体运动的三个方向角速率信息;三个加速度计用来测量载体三个方向的线运动,输出电流信号;i/f转换模块将三路加速度计输出的电流信号转换为脉冲数,加速度计和i/f转换模块共同完成载体加速度信息测量和采集。
3、惯性测量单元将三个陀螺和三个加速度计分别正交安装,每个敏感轴上分别安装一个陀螺和一个加速度计,如图1所示。理想情况下,三个陀螺和三个加速度计各自测量轴汇聚至测量系统重心。
4、但在实际结构设计过程中,陀螺和加速度计安装位置难以达到理想条件,三个陀螺和三个加速度计测量轴的交点均无法汇聚到测量单元重心。如图2所示,此时,测量单元重心至各个加速度计(陀螺)测量点的连线矢量构成一组杆臂。以测量单元重心为原点的载体坐标系可视为刚体,其上每一点的角速率完全相同。因此,杆臂对陀螺量测输出无影响。但因转动影响,载体坐标系空间各点受力一般不同,表明坐标系原点至加速度计测量点的连线矢量构成的杆臂对加速度计量测值有影响。加速度计测量点比力与坐标原点处比力的关系为:
5、
6、其中,和分别表示加速度计测量点相对于坐标系原点的切向加速度和法向加速度。由此可知,杆臂对加表测量精度有影响,尤其在高动态条件下,影响更大。
7、除此之外,由于光纤陀螺内部中央为空心,空间结构未得到合理规划和利用,使得陀螺和加速度计正交安装方式构成的惯性测量单元体积仍较大,导致前述测量单元在小型化应用需求中优势较弱。
8、因此,本领域亟需设计一种新型结构、体积小且加速度计精度高的惯性测量单元。
技术实现思路
1、本发明的目的是提供一种一体化惯性测量模块及惯性测量单元,以解决现有惯性测量单元中加速计测量精度不足以及在小型化应用需求中优势较弱的问题。
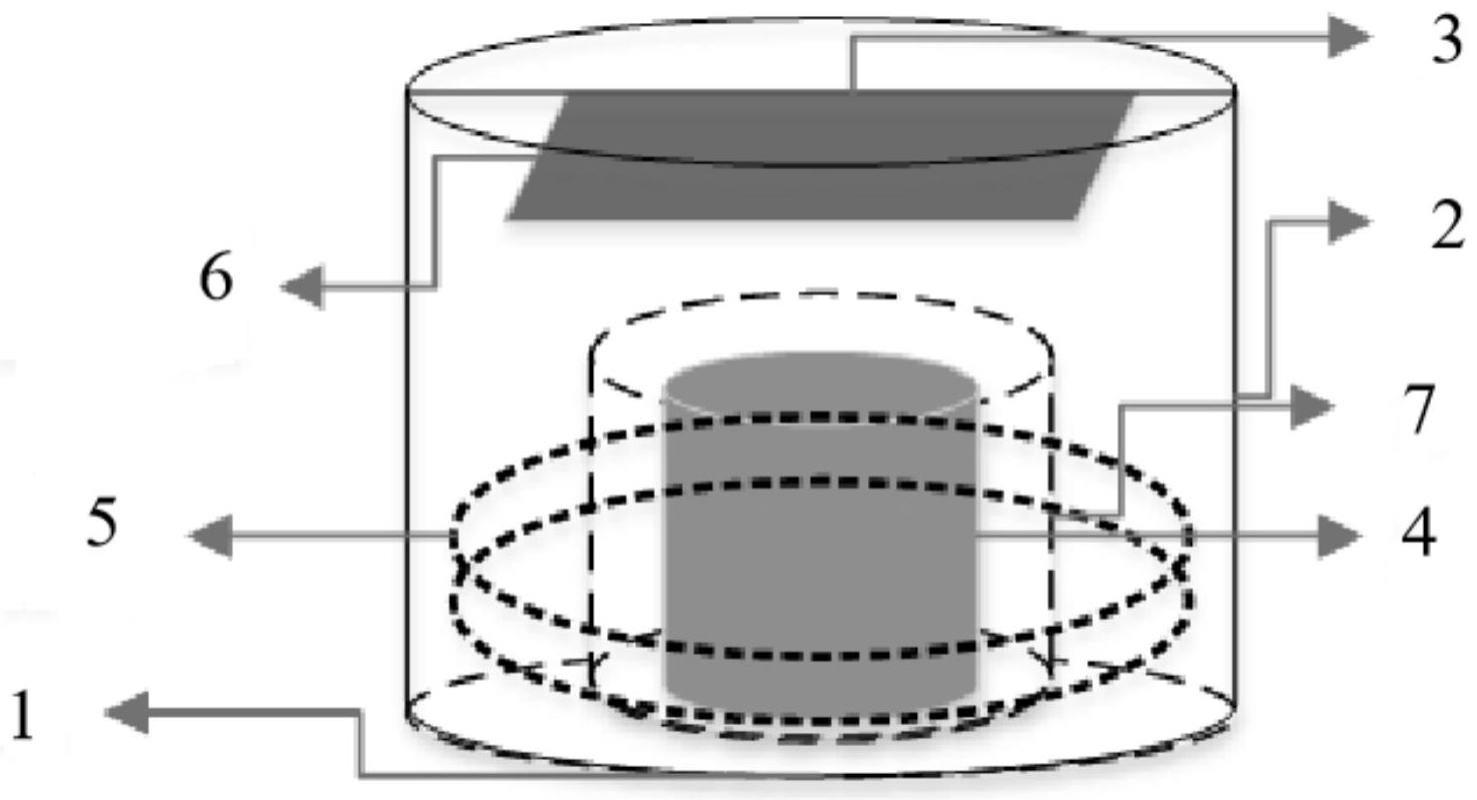
2、为解决上述技术问题,本发明首先提供了一种一体化惯性测量模块,所述模块包括:底座、外壳、顶盖、石英加速度计、光纤环、光纤陀螺组件、电路板;所述的底座、外壳和顶盖配合设置,形成一个密闭空间;所述的石英加速度计、光纤环、光纤陀螺组件、电路板均位于所述的密闭空间内;
3、其中,所述的光纤环固定安装于所述底座的中间位置;
4、所述的石英加速度计安装于所述光纤环内侧中心轴处,使得所述石英加速度计测量轴与所述的光纤环中心轴重合;
5、所述的光纤陀螺组件安装于所述光纤环的外侧;
6、所述的电路板安装于所述光纤环和石英加速度计的上方,所述的电路板通过信号线与所述的石英加速度计、光纤环、光纤陀螺组件相连。
7、优选地,在所述光纤环内侧、石英加速计外侧安装一内壳。
8、优选地,所述的电路板为陀螺控制与i/f转换集成电路板。
9、优选地,所述的外壳为圆筒状或近圆筒状。
10、优选地,所述的光纤陀螺组件包括:光源、耦合器、探测器、集成光学器件等。
11、优选地,所述的电路板通过螺钉与所述外壳固定安装;所述的石英加速度计、光纤环、光纤陀螺组件均分别通过螺钉与所述底座固定安装。
12、优选地,所述的顶盖上设有接口,用于安装接插件,以对外传输所述测量模块测得的数据。
13、本发明另一方面还提供了一种惯性测量单元,所述的测量单元包括三个前面任一项所述的一体化惯性测量模块;所述的三个一体化惯性测量模块呈空间正交布局。
14、优选地,所述的三个一体化惯性测量模块合理配重,保证加速度计测量轴交点与载体坐标系远点重合,提高加速度计测量精度。
15、相对于现有技术,本发明的有益效果是:
16、1、本发明提供了一种一体化惯性测量模块,该惯性测量模块合理利用陀螺光纤环内侧空出来的空间,将石英加速度计置于光纤环内侧,与传统方案相比,节省了加速度计空间,缩小了惯性测量模块体积;更重要的是,本发明提供的惯性模块使光纤环和加速度计共轴,有利于消除杆臂对石英加速度计测量精度的影响,提高惯性测量模块及单元的测量精度。
17、2、本发明将陀螺控制电路与i/f转换电路集成设计,一方面,节省了光纤环周围的空间,为加速度计放入陀螺中心提供空间;另一方面,从惯性测量模块来看,两块电路板变为一块电路板,节省了空间,缩小了体积;同时,三个新的惯性测量模块构成的测量单元,只需要三个接插件,而传统方案需要七个接插件。
18、3、本发明提供的一体化惯性测量模块及惯性测量单元,具有体积小、动态测试精度高、成本低等优势,具有良好的市场应用前景。
技术特征:
1.一种一体化惯性测量模块,其特征在于,所述模块包括:底座、外壳、顶盖、石英加速度计、光纤环、光纤陀螺组件、电路板;所述的底座、外壳和顶盖配合设置,形成一个密闭空间;所述的石英加速度计、光纤环、光纤陀螺组件、电路板均位于所述的密闭空间内;
2.如权利要求1所述的一体化惯性测量模块,其特征在于,在所述光纤环内侧、石英加速计外侧安装一内壳。
3.如权利要求1所述的一体化惯性测量模块,其特征在于,所述的电路板为陀螺控制与i/f转换集成电路板。
4.如权利要求1所述的一体化惯性测量模块,其特征在于,所述的外壳为圆筒状或近圆筒状。
5.如权利要求1所述的一体化惯性测量模块,其特征在于,所述的光纤陀螺组件包括:光源、耦合器、探测器、集成光学器件。
6.如权利要求1所述的一体化惯性测量模块,其特征在于,所述的电路板通过螺钉与所述外壳固定安装;所述的石英加速度计、光纤环、光纤陀螺组件均分别通过螺钉与所述底座固定安装。
7.如权利要求1所述的一体化惯性测量模块,其特征在于,所述的顶盖上设有接口,用于安装接插件,以对外传输所述测量模块测得的数据。
8.一种惯性测量单元,其特征在于,所述的测量单元包括三个权利要求1-7中任一项所述的一体化惯性测量模块。
9.如权利要求8所述的惯性测量单元,其特征在于,所述的三个一体化惯性测量模块呈空间正交布局。
10.如权利要求8所述的惯性测量单元,其特征在于,所述的三个一体化惯性测量模块合理配重,保证加速度计测量轴交点与载体坐标系远点重合,提高加速度计测量精度。
技术总结
本发明公开了一种一体化惯性测量模块及惯性测量单元,所述模块包括:底座、外壳、顶盖、石英加速度计、光纤环、光纤陀螺组件、电路板;所述的底座、外壳和顶盖配合设置,形成一个密闭空间;所述的石英加速度计、光纤环、光纤陀螺组件、电路板均位于所述的密闭空间内;其中,所述的光纤环固定安装于所述底座的中间位置;所述的石英加速度计安装于所述光纤环内侧中心轴处,使得所述石英加速度计测量轴与所述的光纤环中心轴重合。本发明将石英加速度计置于光纤环内侧,缩小了惯性测量模块体积;更重要的是,光纤环和加速度计共轴,有利于消除杆臂对石英加速度计测量精度的影响,提高惯性测量模块及单元的测量精度,具有良好的市场应用前景。
技术研发人员:孙湘钰,于浩泽,刘洋,慕容欣,卢彤春
受保护的技术使用者:上海航天控制技术研究所
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!