基于光纤分光多视场调频连续波激光雷达测距测速系统的制作方法
本发明属于激光雷达,涉及一种基于光纤分光多视场调频连续波激光雷达测距测速系统。
背景技术:
1、激光雷达是由发射系统主动发射激光照射目标区域,然后由探测系统对目标反射的激光回波信号进行检测与处理,从而获得目标的位置、速度等特征信息的系统。由于激光的波长比微波的波长短几个数量级,它有更高的角分辨率、距离分辨率和速度分辨率,更大的测距距离,更强的抗干扰能力以及更小的体积和质量,广泛应用于自动驾驶、气象观测、遥感测绘、三维成像和工业检测等领域。
2、传统的激光雷达通常测量目标是唯一的,无法实现同时测距和测速,还存在测量盲区。然而激光雷达应用的场景往往涉及到多个测量目标同时测量,此时传统的激光雷达难以满足测量要求。
3、调频连续波激光雷达采用频率随时间变化的调制信号进行探测。相较于传统的使用脉冲激光信号的飞行时间(tof)法,使用调频连续波不需要高精度的计时器和接收器,不存在距离盲区,可提供更大的测距范围和更高的分辨率与灵敏度,并且理论上不受环境光和其他激光发射器的影响,信噪比更高,对人眼安全。
技术实现思路
1、(一)发明目的
2、本发明的目的是:为了实现测量多目标多视场的同时测距和测速,提出一种基于光纤分光多视场调频连续波原理的激光雷达测距测速系统和测量方法,从而实现多路激光同时对多个目标进行距离和速度测量。
3、(二)技术方案
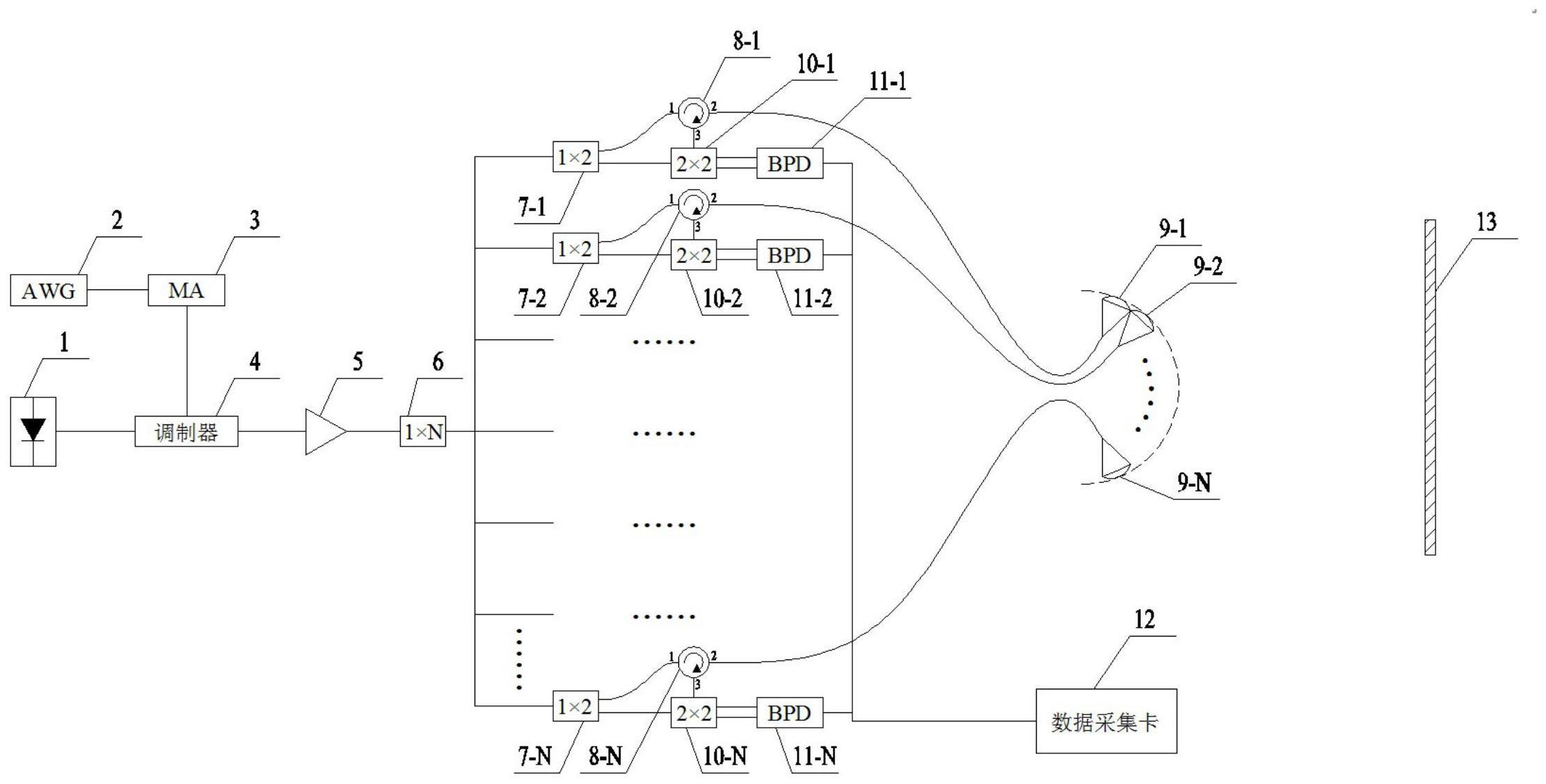
4、为了解决上述技术问题,本发明提供一种基于光纤分光多视场调频连续波激光雷达测距测速系统,其包括:窄线宽单频光纤激光器1、任意波形发生器2、微波放大器3、电光调制器4、edfa放大模块5、1×n光纤分光系统6、1×2光纤分束器7-1~7-n、环形器8-1~8-n、光纤准直器9-1~9-n、2×2光纤耦合器10-1~10-n、平衡探测器11-1~11-n、数据采集模块12、目标物13;
5、所述窄线宽单频光纤激光器1发出激光,其输出端口连接电光调制器4的光信号输入端口,任意波形发生器2的波形输出端口经过波放大器3后连接电光调制器4的微波信号输入端口,电光调制器4的光信号输出端口经edfa放大模块5后连接1×n光纤分光系统6的输入端口,1×n光纤分光系统6的n路输出端口每路独立地与一路光学处理支路连接,n路光学处理支路结构相同,均包括依次连接的光纤分束器、环形器、光纤准直器、2×2光纤耦合器和平衡探测器;在其中一路光学处理支路中,1×n光纤分光系统6的输出端口与1×2光纤分束器7-1的输入端口连接,1×2光纤分束器7-1分束后形成两路输出光,其中一路光作为本振光,另一路作为探测光,探测光与环形器8-1的输入端口1接,环形器8-1的输出端口2与光纤准直器的9-1的端口连接后发射到空间中对物体进行探测,经目标物13反射的光由光纤准直器9-1进行接收,接收到的光信号经环形器8-1的输出端口3与1×2光纤分束器7-1分束后的探测光分别与2×2光纤耦合器10-1的两个输入端口相连,2×2光纤耦合器10-1的输出端口与平衡探测器11-1的输入端口连接,平衡探测器11-1的输出端口与数据采集模块12连接。
6、其中,所述窄线宽单频光纤激光器1发射出激光后进入电光调制器4,任意波形发生器2和微波放大器3通过电光调制器4对激光载波进行调制,实现载波抑制下线性调频信号,调制光经edfa放大器5后经1×n光纤分光系统6等功分成n路调制激光;n路调制激光分别独立地为n个激光探测的种子光源,n个通道并行发射/接收,每个通道对应不同的视场,各个通道各自的发射/接收视场完全匹配;n个通道调制激光方式相同,其中第一路光学处理支路中,第一路调制激光经1×2光纤分束器7-1后分成两束光,其中一束为本振光,另一束为探测光;探测光经过光纤环形器8-1后经光纤准直器9-1发射到物体上,由目标发射后的探测光入射至环形器8-1后与本振光进入2×2光纤耦合器10-1进行相干混频,由平衡探测器11-1接收得到中频信号;n路通道并行发射/接收得到的中频信号经过滤波和采样后进行实时n路并行快速傅里叶变换,使用模块12实现n路通道距离和速度的同步测量。
7、其中,所述窄线宽单频光纤激光器1发出的激光为连续光,波长中心在1550nm且线宽小于10khz。
8、其中,所述任意波形发生器2、微波放大器3、电光调制器4组成线性调频信号产生模块;所述电光调制器4为iq调制器,用于对所述窄线宽单频光纤激光器1进行线性调频,实现载波抑制下的单边带调制;所述任意波形发生器2和微波放大器3用于产生两路正交的射频信号,作为电光调制器4的驱动信号;任意波形发生器2产生的波形为锯齿波或三角波的两路正交线性调频信号,经调制后的激光为单边带调制激光,由正一阶边带或负一阶边带组成。
9、其中,所述激光雷达测距测速系统所用器件全部为光纤器件且各器件之间为光纤连接。
10、其中,所述1×n光纤分光系统6用于将所述经过edfa放大器5放大后的线性调频光进行n等分,作为n路通道的种子光源,等分后每路调制激光功率大于40mw。
11、其中,n个所述1×2光纤分束器7-1~7-n的功分比为90:10,其中90%部分作为探测光,10%部分作为本振光。
12、其中,所述电光调制器4、任意波形放大器2、微波放大器3的带宽均大于15ghz,所述平衡探测器的带宽大于1ghz。
13、其中,n个所述光纤准直器布置成弧面形式。
14、其中,经iq电光调制器4后的单边带调制光输出,正一阶边带光强和负一阶边带光强分别为:
15、s+=-e0exp[j2πf0t+jθ(t)]j1(β)
16、s-=-e0exp[j2πf0t-jθ(t)]j1(β)
17、式中,e0为窄线宽单频激光器的输入光强,f0为激光器的载波频率,j1(β)为一阶贝塞尔函数,β为调制深度与电光调制器的偏置电压和半波电压比有关,θ(t)为任意波形发生器发出的三角波或锯齿波线性调频信号;
18、接收到的信号在三角波的上升频段和下降频段分别进行傅里叶变换,得到两个拍频频率f1与f2,将其带入距离和速度公式:
19、
20、
21、由上式即可根据线性调频连续波激光雷达方式实现对物体的同时测距和测速,式中t为线性调频信号的调制周期,b为线性调频信号的调制带宽,λ为激光器的中心波长。
22、(三)有益效果
23、上述技术方案所提供的基于光纤分光多视场调频连续波激光雷达测距测速系统,可以实现不同距离下多视场融合探测,能够在无扫描模式下同时扩大视场角和提供角分辨率,避免了传统激光雷达大视场探测需要扫描振镜而对机械结构要求较高的问题,提高了整体系统的稳定性。
技术特征:
1.一种基于光纤分光多视场调频连续波激光雷达测距测速系统,其特征在于,包括:窄线宽单频光纤激光器(1)、任意波形发生器(2)、微波放大器(3)、电光调制器(4)、edfa放大模块(5)、1×n光纤分光系统(6)、1×2光纤分束器(7-1~7-n)、环形器(8-1~8-n)、光纤准直器(9-1~9-n)、2×2光纤耦合器(10-1~10-n)、平衡探测器(11-1~11-n)、数据采集模块(12)、目标物(13);
2.如权利要求1所述的基于光纤分光多视场调频连续波激光雷达测距测速系统,其特征在于,所述窄线宽单频光纤激光器(1)发射出激光后进入电光调制器(4),任意波形发生器(2)和微波放大器(3)通过电光调制器(4)对激光载波进行调制,实现载波抑制下线性调频信号,调制光经edfa放大器5后经1×n光纤分光系统(6)等功分成n路调制激光;n路调制激光分别独立地为n个激光探测的种子光源,n个通道并行发射/接收,每个通道对应不同的视场,各个通道各自的发射/接收视场完全匹配;n个通道调制激光方式相同,其中第一路光学处理支路中,第一路调制激光经1×2光纤分束器(7-1)后分成两束光,其中一束为本振光,另一束为探测光;探测光经过光纤环形器(8-1)后经光纤准直器(9-1)发射到物体上,由目标发射后的探测光入射至环形器(8-1)后与本振光进入2×2光纤耦合器(10-1)进行相干混频,由平衡探测器(11-1)接收得到中频信号;n路通道并行发射/接收得到的中频信号经过滤波和采样后进行实时n路并行快速傅里叶变换,使用模块12实现n路通道距离和速度的同步测量。
3.如权利要求2所述的基于光纤分光多视场调频连续波激光雷达测距测速系统,其特征在于,所述窄线宽单频光纤激光器(1)发出的激光为连续光,波长中心在1550nm且线宽小于10khz。
4.如权利要求3所述的基于光纤分光多视场调频连续波激光雷达测距测速系统,其特征在于,所述任意波形发生器(2)、微波放大器(3)、电光调制器(4)组成线性调频信号产生模块;所述电光调制器(4)为iq调制器,用于对所述窄线宽单频光纤激光器(1)进行线性调频,实现载波抑制下的单边带调制;所述任意波形发生器(2)和微波放大器(3)用于产生两路正交的射频信号,作为电光调制器(4)的驱动信号;任意波形发生器(2)产生的波形为锯齿波或三角波的两路正交线性调频信号,经调制后的激光为单边带调制激光,由正一阶边带或负一阶边带组成。
5.如权利要求4所述的基于光纤分光多视场调频连续波激光雷达测距测速系统,其特征在于,所述激光雷达测距测速系统所用器件全部为光纤器件且各器件之间为光纤连接。
6.如权利要求5所述的基于光纤分光多视场调频连续波激光雷达测距测速系统,其特征在于,所述1×n光纤分光系统(6)用于将所述经过edfa放大器5放大后的线性调频光进行n等分,作为n路通道的种子光源,等分后每路调制激光功率大于40mw。
7.如权利要求6所述的基于光纤分光多视场调频连续波激光雷达测距测速系统,其特征在于,n个所述1×2光纤分束器(7-1~7-n)的功分比为90:10,其中90%部分作为探测光,10%部分作为本振光。
8.如权利要求7所述的基于光纤分光多视场调频连续波激光雷达测距测速系统,其特征在于,所述电光调制器(4)、任意波形放大器2、微波放大器(3)的带宽均大于15ghz,所述平衡探测器的带宽大于1ghz。
9.如权利要求8所述的基于光纤分光多视场调频连续波激光雷达测距测速系统,其特征在于,n个所述光纤准直器布置成弧面形式。
10.如权利要求9所述的基于光纤分光多视场调频连续波激光雷达测距测速系统,其特征在于,经iq电光调制器(4)后的单边带调制光输出,正一阶边带光强和负一阶边带光强分别为:
技术总结
本发明属于激光雷达技术领域,公开了一种基于光纤分光多视场调频连续波激光雷达测距测速系统,窄线宽单频光纤激光器发射出激光后进入电光调制器,波形发生器和微波放大器通过电光调制器对激光载波进行调制,调制光经EDFA放大、分光系统分成N路激光,每路激光经分束器分成一束本振光、一束探测光,探测光经光纤环形器、准直器发射到物体上,目标发射的探测光入射至环形器后与本振光进入耦合器进行相干混频,经平衡探测器接收得到中频信号,经过滤波和采样后进行实时N路并行快速傅里叶变换,使用数据采集卡实现N路距离和速度的同步测量。本发明基于激光雷达多路距离测量可扩大激光雷达视场角和提高激光雷达角分辨率,克服串扰问题。
技术研发人员:陈孝林,杨峰,阳琴,曾诚,徐诗月,杨镇源,高剑波
受保护的技术使用者:西南技术物理研究所
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!