具有高精度的实测实量方法、激光雷达及系统与流程
本发明涉及一种具有高精度的实测实量方法、激光雷达及系统。
背景技术:
1、所谓实际测量,是指应用测量工具,通过现场测试、测量并能真实反映产品质量数据的一种方法。根据相关的质量验收标准,计量控制工程质量数据误差在国家住房建设标准允许的范围内。
2、实际测量涉及的项目发展阶段主要有主体结构阶段、砌体阶段、抹灰阶段、设备安装阶段和精装修阶段。测量范围包括混凝土结构、砌体工程、抹灰工程、防水工程、门窗工程、油漆工程、精装修工程等。
3、现有的实测实量工具存在测量精度低,特别是门窗的测量存在测量误差较大的缺陷。
技术实现思路
1、本发明要解决的技术问题是为了克服现有技术中实测实量工具存在测量精度低,特别是门窗的测量存在测量误差较大的缺陷,提供一种能够提高激光雷达测量数据的精度,特别是对室内门窗的测量,精度大幅度提升的具有高精度的实测实量方法、激光雷达及系统。
2、本发明是通过下述技术方案来解决上述技术问题:
3、一种具有高精度的实测实量方法,所述实测实量方法包括:
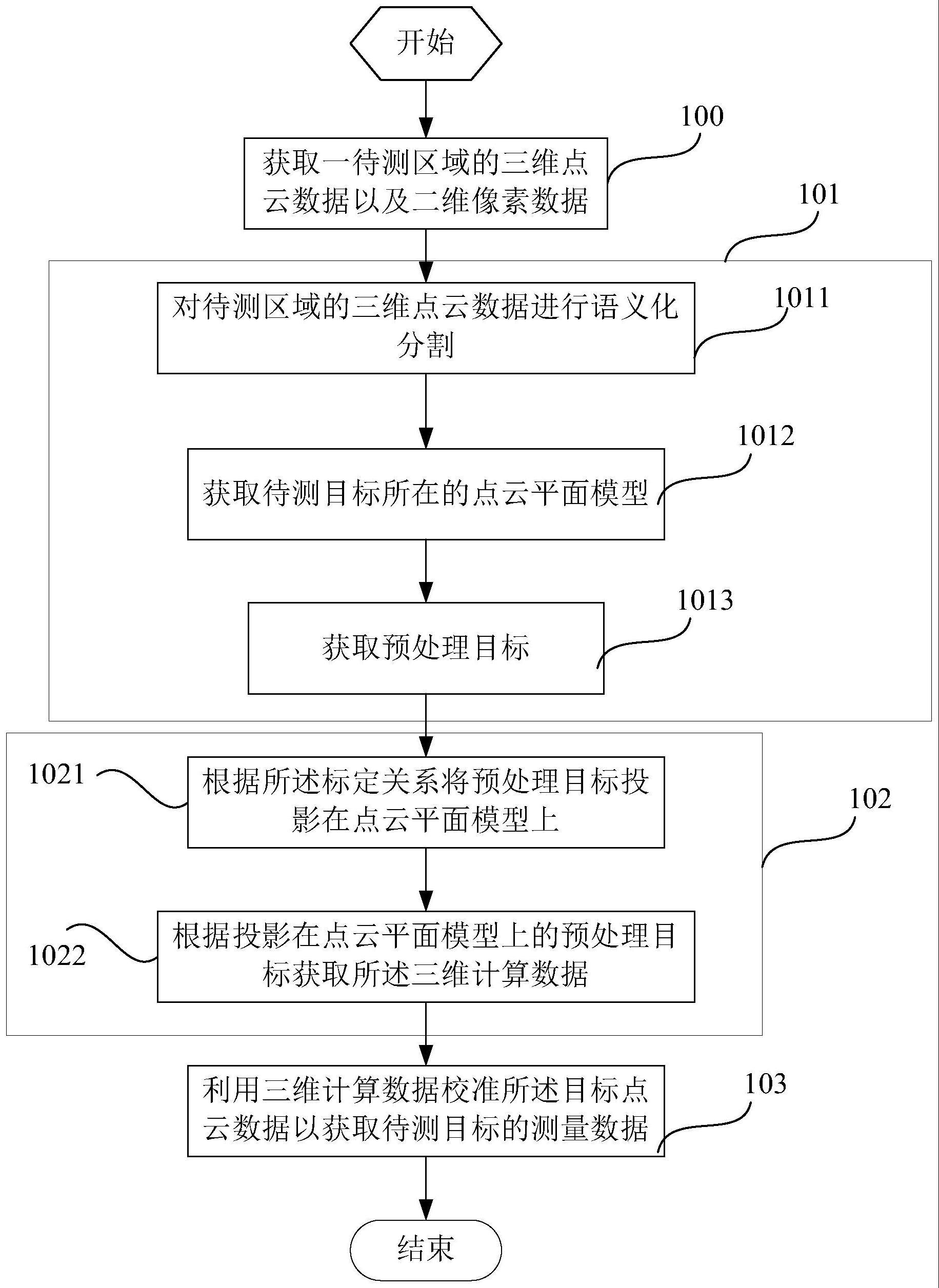
4、获取一待测区域的三维点云数据以及二维像素数据,所述三维点云数据通过激光雷达获取,所述二维像素数据通过rgb镜头获取,所述激光雷达与所述rgb镜头之间包括一标定关系;
5、对待测区域的三维点云数据以及二维像素数据进行预处理获取待测区域中待测目标的目标点云数据及目标像素数据;
6、根据所述标定关系以及目标点云数据获取目标像素数据中待测目标的三维计算数据;
7、利用三维计算数据校准所述目标点云数据以获取待测目标的测量数据。
8、较佳地,所述实测实量方法包括:
9、对待测区域的三维点云数据进行语义化分割,将待测区域的三维点云数据划分为若干点云平面模型,所述预处理包括所述语义化分割;
10、获取待测目标所在的点云平面模型;
11、获取预处理目标,所述预处理目标为待测目标所在的点云平面模型所对应的二维像素数据;
12、根据所述标定关系将预处理目标投影在点云平面模型上;
13、根据投影在点云平面模型上的预处理目标获取所述三维计算数据。
14、较佳地,所述获取预处理目标,包括:
15、在二维像素数据选取或识别所述待测目标的目标像素数据;
16、在二维像素数据中获取目标像素数据所在墙面的墙面边缘;
17、根据所述墙面边缘获取目标像素数据所在墙面的像素数据作为所述预处理目标。
18、较佳地,所述实测实量方法包括:
19、在二维像素数据中根据纹理信息以目标像素数据为起点向四周识别墙面边缘。
20、较佳地,所述待测目标为门框或窗框,所述根据投影在点云平面模型上的预处理目标获取所述三维计算数据包括:
21、识别投影后预处理目标的待测目标的角特征点;
22、根据点云平面模型与预处理目标的对应关系以及点云平面模型的空间坐标获取角特征点之间的长度,所述三维计算数据包括角特征点之间的长度。
23、较佳地,所述实测实量方法包括:
24、获取一待测区域的三维点云数据以及若干二维初始数据;
25、待测区域的三维点云数据以及二维初始数据进行对齐处理;
26、将待测区域的三维点云数据与全部待测区域的二维初始数据进行匹配,并利用最小化加权能量误差选择一最优的二维初始数据作为所述二维像素数据。
27、较佳地,所述实测实量方法包括:
28、获取一待测区域的三维点云数据以及若干二维初始数据;
29、获取待测目标的目标点云数据;
30、获取激光雷达对准所述待测目标的时刻;
31、获取与所述时刻匹配的二维初始数据作为所述二维像素数据。
32、较佳地,所述实测实量方法包括:
33、在二维像素数据中识别预处理目标的边缘;
34、根据所述标定关系将预处理目标投影在点云平面模型上;
35、获取投影在点云平面模型上的两个所述边缘点的长度与点云平面模型上对应点的长度是否匹配,若否则忽略当前边缘像素后再次执行在二维像素数据中识别预处理目标的边缘的步骤,若是则将预处理目标拉伸后覆盖至所述点云平面模型上;
36、在拉伸后的预处理目标获取所述三维计算数据;
37、判断三维计算数据与目标点云数据是否匹配,若否则以三维计算数据作为待测目标的测量数据。
38、本发明还提供一种具有高精度的激光雷达系统,所述激光雷达系统包括一激光雷达、一rgb镜头、一处理模块以及一服务端,所述激光雷达系统用于实现如上所述的实测实量方法。
39、本发明还提供一种激光雷达,所述激光雷达用于如上所述的激光雷达系统。
40、符合本领域常识的基础上,上述各优选条件,可任意组合,即得本发明各较佳实例。
41、本发明的积极进步效果在于:
42、本发明能够提高激光雷达测量数据的精度,特别是对室内门窗的测量,精度大幅度提升。
43、本发明能够提高只通过激光雷达测量数据的精度,现有激光雷达的精度受多种因素影响,如雷达精度、图片分辨率和线拟合方差等,经测试本发明在理想情况下测量结果的误差可由5mm降低到1mm。
技术特征:
1.一种具有高精度的实测实量方法,其特征在于,所述实测实量方法包括:
2.如权利要求1所述的实测实量方法,其特征在于,所述实测实量方法包括:
3.如权利要求2所述的实测实量方法,其特征在于,所述获取预处理目标,包括:
4.如权利要求3所述的实测实量方法,其特征在于,所述实测实量方法包括:
5.如权利要求3所述的实测实量方法,其特征在于,所述待测目标为门框或窗框,所述根据投影在点云平面模型上的预处理目标获取所述三维计算数据包括:
6.如权利要求2所述的实测实量方法,其特征在于,所述实测实量方法包括:
7.如权利要求2所述的实测实量方法,其特征在于,所述实测实量方法包括:
8.如权利要求7所述的实测实量方法,其特征在于,所述实测实量方法包括:
9.一种具有高精度的激光雷达系统,其特征在于,所述激光雷达系统包括一激光雷达、一rgb镜头、一处理模块以及一服务端,所述激光雷达系统用于实现如权利要求1至8中任意一项所述的实测实量方法。
10.一种激光雷达,其特征在于,所述激光雷达用于如权利要求9所述的激光雷达系统。
技术总结
本发明公开了一种具有高精度的实测实量方法、激光雷达及系统,所述实测实量方法包括:获取一待测区域的三维点云数据以及二维像素数据,所述三维点云数据通过激光雷达获取,所述二维像素数据通过RGB镜头获取,所述激光雷达与所述RGB镜头之间包括一标定关系;对待测区域的三维点云数据以及二维像素数据进行预处理获取待测区域中待测目标的目标点云数据及目标像素数据;根据所述标定关系以及目标点云数据获取目标像素数据中待测目标的三维计算数据;利用三维计算数据校准所述目标点云数据以获取待测目标的测量数据。本发明能够提高激光雷达测量数据的精度,特别是对室内门窗的测量,精度大幅度提升。
技术研发人员:李辉,金海建,程宏宇
受保护的技术使用者:盎锐(常州)信息科技有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!