一种分布式无人机载雷达扩展目标检测方法与系统
本发明涉及分布式无人机载雷达目标检测方法与系统,尤其涉及一种分布式无人机载雷达扩展目标检测方法与系统。
背景技术:
1、无人作战装备在近几场局部战争中大放异彩,无人作战力量正深刻影响和改变战争面貌。相较于有人装备,无人作战装备拥有无可比拟的优势,如极大减少人员伤亡、作战效费比高、隐蔽性能好等。
2、然而,单部无人机由于载荷有效,作战效能不佳。而由多部无人机组成的无人机集群可以分布式模型展开探测及火力攻击,作战效能大为提高。搭载雷达及光电探测设备的分布式机载雷达具有诸多探测优势。已有一些针对分布式机载雷达目标检测的研究方法,例如,文献(程子扬,何子述,王智磊,等.分布式mimo雷达目标检测性能分析[j].雷达学报,2017,6(1):81-89.)分析了分布式检测的检测性能,但在每个发射-接收站点对应的系统为标量,无法有效探测目标的空域角度信息及时域多普勒信息。专利(分布式无人机mimo雷达的非相参融合目标检测方法,申请公布号cn 110412559 a,申请号201910681853.9)提出了一种针对分布式无人机的mimo雷达非相参融合目标检测方法,利用分布式无人机对目标进行融合检测。然而,上述专利所提方法假设待检测距离单元的杂波加噪声协方差矩阵已知,这一要求往往在实际中无法满足。
3、此外,上述文献及专利都未考虑目标的扩展特性。而在实际中,无人机载雷达的发射频率通常很高,相应的信号带宽也很宽,目标往往占据多个距离分辨单位,体现出空间分布特性。此时,已有方法难以对目标进行有效检测。
技术实现思路
1、为了解决上述技术难题,本发明提供一种分布式无人机载雷达扩展目标检测方法与系统,用以克服现有技术中分布式无人机载雷达目标检测困难的问题。
2、为实现上述目的,本发明提供一种分布式无人机载雷达扩展目标检测方法,包括:
3、步骤1,根据发射信号的无人机数量、接收信号的无人机数量、每架无人机具备的阵元数、发射脉冲数、待检测目标方位,构造待检测数据、信号导向矢量、训练样本;
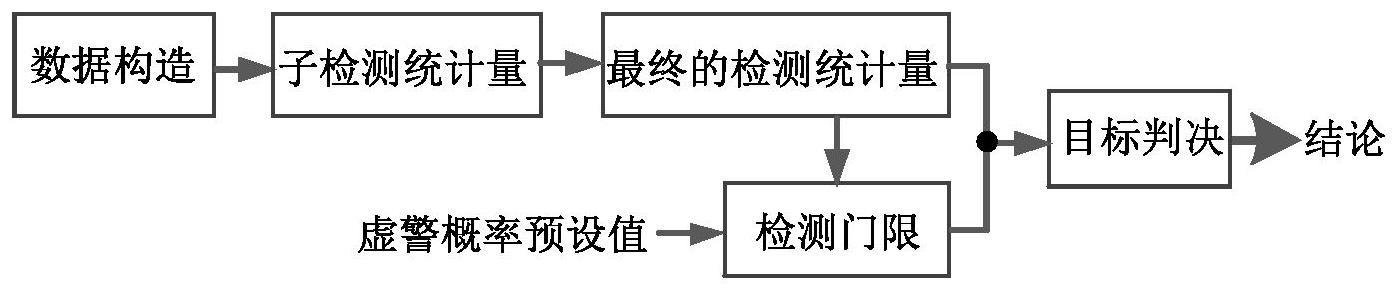
4、步骤2,利用所述待检测数据、信号导向矢量、训练样本构造子检测统计量;
5、步骤3,利用所述子检测统计量构造最终的检测统计量;
6、步骤4,利用所述最终的检测统计量和虚警概率确定检测门限;
7、步骤5,比较所述最终的检测统计量与所述检测门限之间的大小,并判决目标是否存在。
8、所述步骤1中,信号导向矢量smn(θt,m,θr,n,fmn)具有下式所示结构:
9、
10、符号表示kronecker积,sd(fmn)、st(θt,m)和sr(θr,n)分别为目标的多普勒导向矢量、第m架用于发射信号的无人机相对目标的发射导向矢量和第n架用于接收信号的无人机相对目标的接收导向矢量,且三者的表达式分别为
11、
12、
13、和
14、
15、符号(·)t表示转置,fmn为目标相对于第m架用于发射信号的无人机及第n架用于接收信号的无人机的归一化多普勒频率,θt,m为第m架用于发射信号的无人机的发射信号角度,θr,n为第n架用于接收信号的无人机的接收信号角度。
16、进一步地,所述步骤1中,发射信号的无人机数量为m、接收信号的无人机数量为n、每架发射信号的无人机含有的阵元天线数为mm,m=1,2,…,m,每架发射信号的无人机均发射k个脉冲,每架接收信号的无人机含有的阵元天线数为nn,n=1,2,…,n,待检测数据为xmn,m=1,2,…,m,n=1,2,…,n,xmn的维数为kmmnn×w,w为目标扩展维数,训练样本为ymnl,l=1,2,…,lmn,lmn为对应于第m架发射信号无人机及第n架接收信号无人机的训练样本数。
17、进一步地,所述步骤2中,所构造的子检测统计量为:
18、
19、其中,符号(·)h表示共轭转置,(.)-1表示矩阵的逆,iw为w×w维单位矩阵,
20、进一步地,所述步骤3中,所构造的最终检测统计量为:
21、
22、进一步地,所述步骤4中,所述检测门限为:
23、η=t(n*)
24、其中,q为蒙特卡洛仿真次数,κ为系统的虚警概率值,为取整操作,t(i)为序列由大到小排列第i个最大值;其中,smn表示smn(θt,m,θr,n,fmn)的简写,即smn=smn(θt,m,θr,n,fmn),xmn(k)为仅含噪声分量的待检测数据矩阵的第k次实现,iw为w×w维单位矩阵,ymnl(k)为第l个训练样本数据的第k次实现,其中k=1,2,…,q。
25、进一步地,所述步骤5中,判决目标是否存在根据下述结果进行:若所述检测统计量t大于检测门限η,则判决目标存在,反之则判决目标不存在。
26、另一方面,本发明提供一种分布式无人机载雷达扩展目标检测方法的系统,包含:
27、数据构造模块,用以构造待检测数据、训练样本数据和信号导向矢量;
28、信号导向矢量构造模块,用以构造信号导向矢量;
29、子检测统计量构造模块,用以利用所述待检测数据、训练样本和信号导向矢量构造子检测统计量;
30、总检测统计量构造模块,用以利用子检测统计量构造最终的检测统计量;
31、检测门限确定模块,用以利用所述最终的检测统计量和虚警概率确定检测门限;
32、目标判决模块,用以比较所述最终的检测统计量与所述检测门限之间的大小,并判决目标是否存在。
33、与现有技术相比,本发明的有益效果在于:
34、(1)通过布局发射信号无人机、接收信号无人机,使雷达从不同角度观测目标,降低了目标闪烁对雷达探测性能的影响;
35、(2)通过构造子检测统计量tmn,实现了强杂波抑制,并且子检测统计量具有恒虚警特性,因而避免了后续的恒虚警处理;
36、(3)通过利用子检测统计量tmn构造最终的检测统计量t,积累了所有子检测统计量的能量,并利用连乘结构进一步积累了各子检测器的能量,最终达到提升检测性能的目的;
37、(4)通过对扩展目标的建模,避免了将扩展目标所占据的部分距离分辨单元选为训练样本所带来的目标相消,最终达到了提升检测性能的目的。
技术特征:
1.一种分布式无人机载雷达扩展目标检测方法,其特征在于,包括:
2.根据权利要求1所述的一种分布式无人机载雷达扩展目标检测方法,其特征在于,所述步骤1中,发射信号的无人机数量为m、接收信号的无人机数量为n、每架发射信号的无人机含有的阵元天线数为mm,m=1,2,…,m,每架发射信号的无人机均发射k个脉冲,每架接收信号的无人机含有的阵元天线数为nn,n=1,2,…,n,待检测数据为xmn,m=1,2,,m,n=1,2,,n,xmn的维数为kmmnn×w,w为目标扩展维数,训练样本为ymnl,l=1,2,…,lmn,lmn为对应于第m架发射信号无人机及第n架接收信号无人机的训练样本数。
3.根据权利要求2所述的一种分布式无人机载雷达扩展目标检测方法,其特征在于,所述步骤2中,所构造的子检测统计量为:
4.根据权利要求3所述的一种分布式无人机载雷达扩展目标检测方法,其特征在于,所述步骤3中,所构造的最终检测统计量为:
5.根据权利要求4所述的一种分布式无人机载雷达扩展目标检测方法,其特征在于,所述步骤4中,所述检测门限为:
6.根据权利要求5所述的一种分布式无人机载雷达扩展目标检测方法,其特征在于,所述步骤5中,判决目标是否存在根据下述结果进行:若所述检测统计量t大于检测门限η,则判决目标存在,反之则判决目标不存在。
7.根据权利要求1-6任一权利要求所述的一种分布式无人机载雷达扩展目标检测方法的系统,其特征在于,包含:
技术总结
本发明公开了一种分布式无人机载雷达扩展目标检测方法与系统,根据发射信号的无人机数量、接收信号的无人机数量、每架无人机具备的阵元数、发射脉冲数、待检测目标方位,构造待检测数据、信号导向矢量和训练样本;利用待检测数据、信号导向矢量、训练样本构造子检测统计量;利用子检测统计量构造最终的检测统计量;利用检测统计量和虚警概率确定检测门限;比较检测统计量与检测门限之间的大小,并判决目标是否存在。本发明所设计方法利用分布式联合探测思想,降低了目标闪烁带来的不利影响,基于自适应检测技术,一体化实现了杂波抑制、信号积累和恒虚警处理,提升了对扩展目标的检测性能。
技术研发人员:刘维建,李浩,孙合敏,李槟槟,周必雷
受保护的技术使用者:中国人民解放军空军预警学院
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!