一种基于机器视觉及负泊松比结构的测力方法及系统
本发明属于视觉检测,特别涉及一种基于机器视觉及负泊松比结构的测力方法及系统。
背景技术:
1、在进行力和位移监测过程中,传统测力方式是使用力矩传感器进行检测,将专用的测扭应变片用应变胶粘贴在被测弹性轴上,并组成应变桥,向应变桥提供工作电源即可测试该弹性轴受扭的电信号,这使得传统接触式传感器在实际工程中的推广受到限制,且由于两者需要相互接触,噪声和干扰在两者之间的传播也不可避免,影响了传感器的测量精度。
技术实现思路
1、本发明的目的在于提供一种基于机器视觉及负泊松比结构的测力方法及系统,以解决现有技术中的噪声,影响传感器的测量精度的问题。
2、为实现上述目的,本发明采用以下技术方案:
3、一种基于机器视觉及负泊松比结构的测力方法,包括:
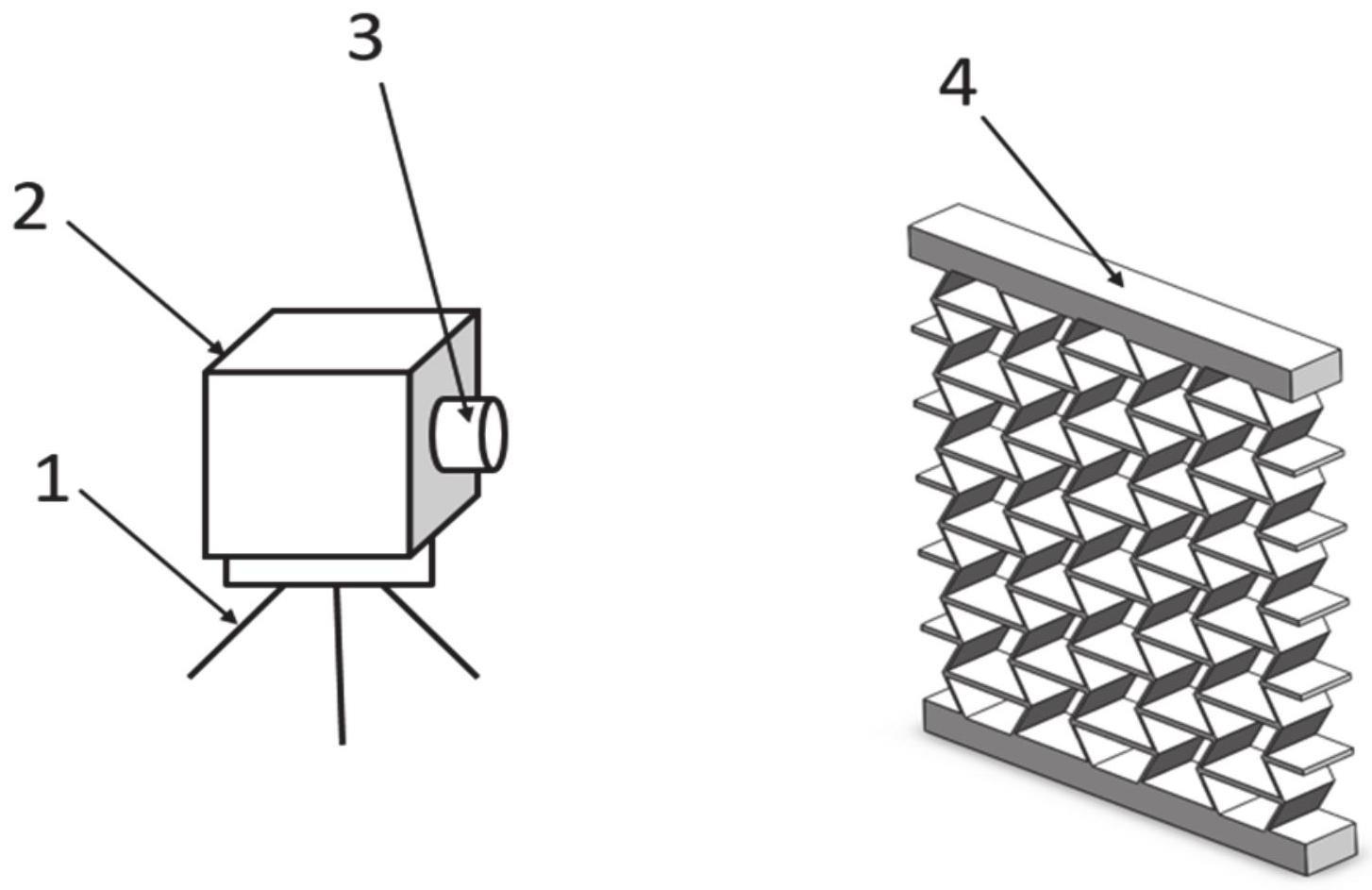
4、以负泊松比结构做基底,将负泊松比结构与工业相机平行放置,将被测物体与负泊松比结构接触;
5、工业相机实时采集变形图片,通过第一帧图片与最后一帧图片所发生的弹性形变大小,得到相应的外力值;
6、对被测物体施加外力作用后,负泊松比结构产生弹性变形,利用应力与应变成比例关系的性质,引入基底的弹性模量e,建立外力与形变量之间的转换方程,使对被测量的测量转化为对基底弹性形变尺寸的测量。
7、进一步的,基于机器视觉技术间接识别负泊松比结构由于受力而引起的形状变化:基于图像对负泊松比结构进行边缘检测,得到基底结构上分布的离散点在图像中的像素坐标值及其相对初始位置的像素位移。
8、进一步的,外力与应力的关系如下:
9、f=σa
10、其中,f为载荷,σ为应力;a为基底与被测元件接触的横截面积。
11、4.根据权利要求1所述的一种基于机器视觉及负泊松比结构的测力方法,其特征在于,测量元件的应变与应力关系如下:
12、σ=eε
13、其中,σ为测量元件所受应力,e为负泊松比结构的弹性模量,ε为负泊松比结构受力后所产生的应变。
14、进一步的,正应变为
15、
16、其中,l是变形前的长度,△l是其变形后的形变量。
17、进一步的,通过相机标定获取相机的内参和外参矩阵,对相机拍摄的图像进行矫正,得到畸变小的图像。
18、进一步的,负泊松比结构与工业相机平行放置时,工业相机的摄像头对准负泊松比结构的基底,使用云台支撑相机。
19、进一步的,一种基于机器视觉及负泊松比结构的测力系统,包括:
20、图像采集模块,用于以负泊松比结构做基底,将负泊松比结构与工业相机平行放置,将被测物体与负泊松比结构接触;工业相机实时采集变形图片,通过第一帧图片与最后一帧图片所发生的弹性形变大小,得到相应的外力值;
21、测量转换模块,用于对被测物体施加外力作用后,负泊松比结构产生弹性变形,利用应力与应变成比例关系的性质,引入基底的弹性模量e,建立外力与形变量之间的转换方程,使对被测量的测量转化为对基底弹性形变尺寸的测量。
22、与现有技术相比,本发明有以下技术效果:
23、本发明一种基于机器视觉测量外力的方法,利用应力与应变成比例关系的性质,引入基底的弹性模量e,建立外力与形变量之间的转换方程,使对被测量的测量转化为对基底形变尺寸的测量。
24、进一步的,相机标定之后可以获得相机的内参与外参矩阵,对之后相机拍摄的图像进行矫正,从而得到畸变相对很小的图像,使测量更准确。
25、进一步的,使用云台支撑相机可以得到稳定的图像信息,云台通过夹持工业相机进行旋转相应方位可实现对待测物体的捕捉,该设置极大的增加了测量结果的精确度。
26、进一步的,相机种类不受限制,选择范围广。可针对不同应用环境选择红外相机或普通相机。该设置扩大了本测量方法的使用范围。
27、进一步的,基底选择不受限制,可为任意胞元结构的负泊松比结构,其作用是将对被测物体所受的外力测量通过负泊松比结构转换为对负泊松比结构的形变尺寸测量。
28、综上所述,本发明提供的方案可靠性高,检测精度高,实用性强,能有效解决现有技术所存在的问题。
技术特征:
1.一种基于机器视觉及负泊松比结构的测力方法,其特征在于,包括:
2.根据权利要求1所述的一种基于机器视觉及负泊松比结构的测力方法,其特征在于,基于机器视觉技术间接识别负泊松比结构由于受力而引起的形状变化:基于图像对负泊松比结构进行边缘检测,得到基底结构上分布的离散点在图像中的像素坐标值及其相对初始位置的像素位移。
3.根据权利要求1所述的一种基于机器视觉及负泊松比结构的测力方法,其特征在于,外力与应力的关系如下:
4.根据权利要求1所述的一种基于机器视觉及负泊松比结构的测力方法,其特征在于,测量元件的应变与应力关系如下:
5.根据权利要求1所述的一种基于机器视觉及负泊松比结构的测力方法,其特征在于,正应变为
6.根据权利要求1所述的一种基于机器视觉及负泊松比结构的测力方法,其特征在于,通过相机标定获取相机的内参和外参矩阵,对相机拍摄的图像进行矫正,得到畸变小的图像。
7.根据权利要求1所述的一种基于机器视觉及负泊松比结构的测力方法,其特征在于,负泊松比结构与工业相机平行放置时,工业相机的摄像头对准负泊松比结构的基底,使用云台支撑相机。
8.一种基于机器视觉及负泊松比结构的测力系统,其特征在于,包括:
技术总结
一种基于机器视觉及负泊松比结构的测力方法及系统,包括:以负泊松比结构做基底,将负泊松比结构与工业相机平行放置,将被测物体与负泊松比结构接触;工业相机实时采集变形图片,通过第一帧图片与最后一帧图片所发生的弹性形变大小,得到相应的外力值;对被测物体施加外力作用后,负泊松比结构产生弹性变形,利用应力与应变成比例关系的性质,引入基底的弹性模量E,建立外力与形变量之间的转换方程,使对被测量的测量转化为对基底弹性形变尺寸的测量。本发明一种基于机器视觉测量外力的方法,利用应力与应变成比例关系的性质,引入基底的弹性模量E,建立外力与形变量之间的转换方程,使对被测量的测量转化为对基底形变尺寸的测量。
技术研发人员:李鹏举,马亚雯,张征凯,温庆国
受保护的技术使用者:西安建筑科技大学
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!