一种导航传感器缓变故障智能主动容错方法
本发明属于导航领域,具体涉及一种导航传感器缓变故障智能主动容错方法。
背景技术:
1、随着导航精度要求的提高,高精度导航传感器被广泛应用于导航领域。然而高精度导航传感器由于其内部部件复杂工作环境多变,其采集的信号易随着时间的变化而缓慢偏离真实值。当偏差值超出系统可接受范围,此时导航传感器发生缓变故障,导航精度降低,导航性能受到影响。当下针对导航传感器急变故障主动容错的研究有很多然而针对缓变故障的相关研究相对较少。原因其一是缓变故障发生初期幅值较小,且随时间变化幅度远小于急变故障,因而难以在短时间内完成缓变故障的诊断。其二是缓变故障发生时间较长,偏离真实值过大,难以进行有效的主动容错。
2、针对导航系统的缓变故障诊断算法相关的研究,国内外学者通常采用bp神经网络提取故障特征。例如在惯导单元故障检测方面张树凤针对imus的故障检测与诊断模型深度置信网络开展了研究与优化,提出采用以深度置信网络为核心的深度学习模型,针对模型的训练及测试开展了轮式机器人的imus故障数据集的创建,并完成了优化后的模型故障诊断性能评价。李刚等提出了一种针对飞行器惯导陀螺仪故障诊断的方法,采用改进的经验模态分解-排列熵算法进行故障检测,对分解的导航信号重新构造作为训练集,利用具有快速学习能力和高准确率的概率神经网络模型,建立陀螺仪故障诊断网络进行故障诊断。张正等利用bp神经网络进行标准传感器信号预测并构建出残差,借助阈值法进行导航传感器故障的诊断和信号重构。以上算法虽然可以对缓变故障进行诊断但耗时较长。并且因为运用了bp神经网络容易造成对训练数据集的过拟合,因而导致实际应用中诊断准确率下降。同时采用阈值法重构的传感器信号种类是很有限的,无法实现多场景应用。
3、针对导航系统缓变故障信号主动修复的研究,工程上常采用阈值法、bp神经网络进行导航传感器缓变故障主动修复。在利用长短期记忆神经网络和卷积神经网络进行导航传感器缓变故障主动修复方面很少有人研究。阈值法是在规定阈值的情况下利用模糊隶属函数计算残差是否超出阈值并诊断故障从而使用残差进行故障修复,但该方法适用场景较少,且阈值的设定具有固定性。泛化能力不够;采用bp神经网络进行导航传感器故障主动修复是使用全连接神经网络作为深度学习模型的核心。构建训练数据集,利用训练后的模型对导航传感器进行故障主动容错。由于bp神经网络的学习能力相对较差,对数据集的依赖太强且故障数据集难以构建,因此故障检测的精度也会受到影响。
技术实现思路
1、本发明的目的在于提供一种导航传感器缓变故障智能主动容错方法,实现了及时准确的进行缓变故障的诊断,并给出修复信号;实现导航传感器缓变故障的快速诊断以及具有泛化能力的导航信号的重构,解决了缓变故障诊断过慢和传统阈值法应用场景单一的问题。
2、实现本发明目的的技术解决方案为:
3、一种导航传感器缓变故障智能主动容错方法,适用于导航传感器缓变故障的诊断和修复,包括:
4、以长短期记忆神经元为基本单元搭建标准信号预测模块并训练,通过标准信号预测模块对导航信号进行预测;
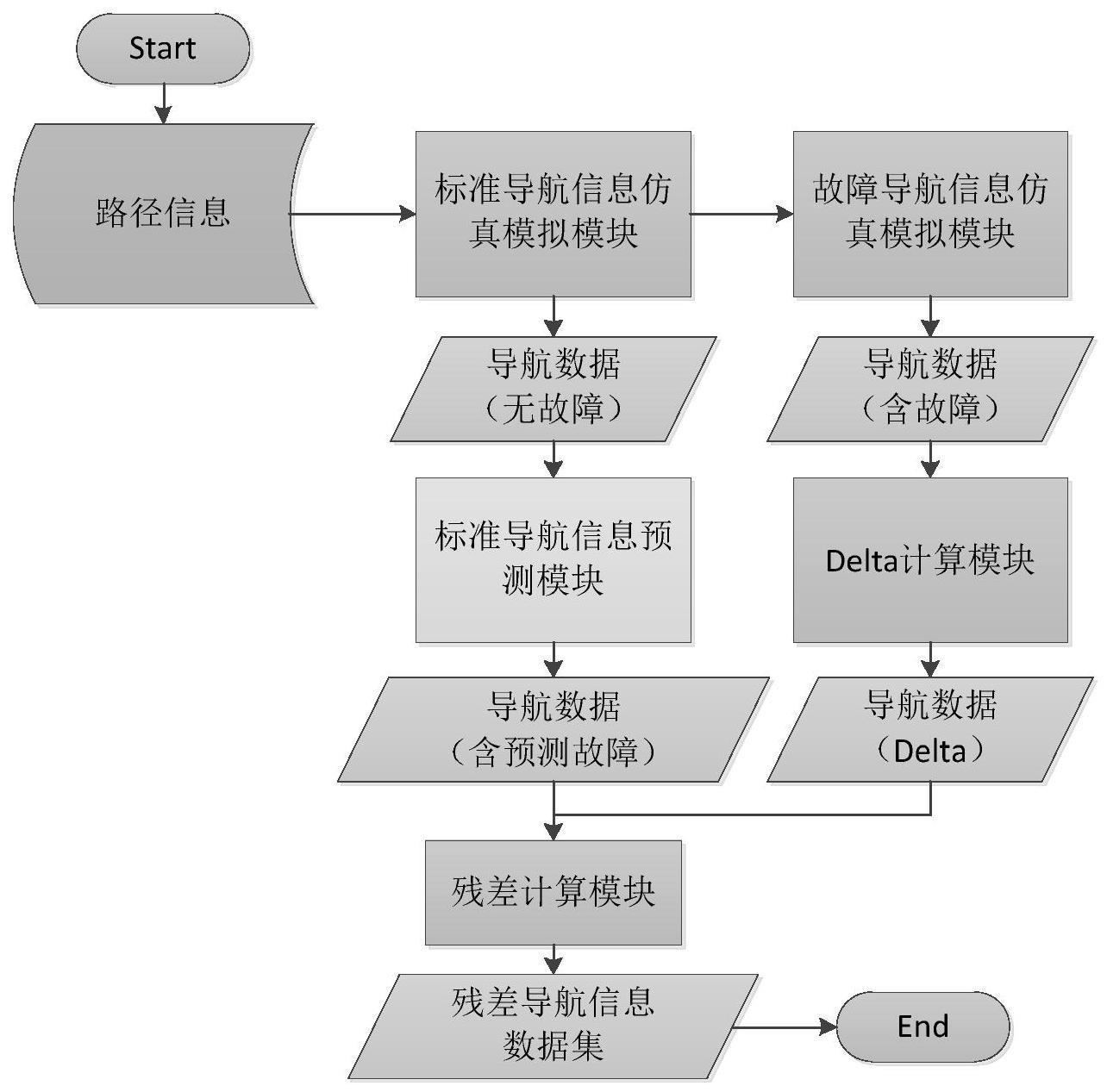
5、采用多层堆叠卷积神经网络模型搭建缓变故障诊断模块并训练,缓变故障诊断模块基于预测信号和量测信号之间的残差提取缓变故障趋势信息,在缓变故障发生初期且对系统影响在设定范围内实现对缓变故障的诊断;
6、若诊断未发生缓变故障,采用量测信号作为导航信号,当诊断到缓变故障发生时,采用标准信号预测模块的预测信号作为导航信号,实现对导航信号缓变故障的主动容错。
7、进一步地,所述标准信号预测模块的训练数据集合采用滑动窗口的办法对构造的时序信息进行截取获取。
8、进一步地,所述标准信号预测模块采用lstm循环神经网络,将多个循环网络堆叠起来增加循环神经网络深度,第l层的输入是第l-1层的输出,层与层间的传播添加dropout机制。
9、进一步地,所述每一层都采用max-min进行归一化,在输出层进行反归一化。
10、进一步地,所述缓变故障诊断模块采用卷积神经网络与全连接神经网络堆叠的模型分别对残差的故障特征提取和故障分类,包括依次连接的第一cnn层、batchnorm层、第二cnn层、relu整流层、dropout层、全连接层和交叉熵损失函数层;dropout层作为输出层,交叉熵损失函数层反向传播至dropout层,更新模型各个单元的权重信息。
11、进一步地,所述缓变故障诊断模块训练的数据数据集为预测信号和量测信号之间的残差,由预测信号数据集与包含故障信息的量测导航信息数据集经过delta计算模块处理和残差处理得到,delta计算模块在预测信号数据处理时采用预测δ值代替预测真实导航信息,δ值为后一个采样点的导航信息减去前一个采样点的导航信息得到,残差信息经过顺序切分,将数据在纵向上按照窗口大小进行切分处理,对切分出来的矩阵进行标注。
12、与现有技术相比,本发明的有益效果在于:
13、(1)本发明利用对时序相关数据更敏感的长短期记忆神经网络(lstm)搭建标准信号预测模块,层与层间的传播添加dropout机制,减弱了神经节点间的联合适应性,增强了泛化能力,得到不受故障影响的量测估计值;采用将训练数据集合分割进行批训练,提高训练效率的同时避免了神经网络的过拟合现象;
14、(2)本发明根据缓变故障特性构建残差矩阵对缓变故障特征进行提取,导航传感器量测信息在时序前后具有相关性,采用基于长短期记忆神经网络(lstm)搭建的标准信号预测模块对导航传感器信号的时序特征进行提取,lstm神经网络最大程度上改善了普通循环神经网络长程依赖问题,引入门控机制来控制信息的积累速度,包括有选择地加入新的信息,并且有选择的遗忘之前累积的信息;同时解决了简单循环神经网络梯度消失和梯度爆炸的问题;然后通过模型预测与实际采集的结果得出的残差信息提取缓变故障特征实现缓变故障的诊断;利用基于卷积神经网络(cnn)搭建的缓变故障诊断模块对残差信息分类,cnn卷积核共享,可以无压力的处理二维残差数据信息;同时卷积神经网络可以自动对生成的导航残差矩阵信息进行特征提取,通过卷积核在残差矩阵上的卷积提取需要的特征(缓变故障特征),该深度学习模型可以根据提取的特征信息,更好的完成分类工作。
技术特征:
1.一种导航传感器缓变故障智能主动容错方法,其特征在于,包括:
2.根据权利要求1所述的一种导航传感器缓变故障智能主动容错方法,其特征在于,所述标准信号预测模块的训练数据集合采用滑动窗口的办法对构造的时序信息进行截取获取。
3.根据权利要求2所述的一种导航传感器缓变故障智能主动容错方法,其特征在于,所述标准信号预测模块采用lstm循环神经网络,将多个循环网络堆叠起来增加循环神经网络深度,第l层的输入是第l-1层的输出,层与层间的传播添加dropout机制。
4.根据权利要求3所述的一种导航传感器缓变故障智能主动容错方法,其特征在于,所述每一层都采用max-min进行归一化,在输出层进行反归一化。
5.根据权利要求4所述的一种导航传感器缓变故障智能主动容错方法,其特征在于,所述神经元包括遗忘门、输出门、新记忆单元和输入门,其中:
6.根据权利要求5所述的一种导航传感器缓变故障智能主动容错方法,其特征在于,所述标准信号预测模块训练过程采用批训练,采用交叉熵作为损失函数,损失函数为:
7.根据权利要求1所述的一种导航传感器缓变故障智能主动容错方法,其特征在于,所述缓变故障诊断模块采用卷积神经网络与全连接神经网络堆叠的模型分别对残差的故障特征提取和故障分类,包括依次连接的第一cnn层、batchnorm层、第二cnn层、relu整流层、dropout层、全连接层和交叉熵损失函数层;dropout层作为输出层,交叉熵损失函数层反向传播至dropout层,更新模型各个单元的权重信息。
8.根据权利要求7所述的一种导航传感器缓变故障智能主动容错方法,其特征在于,所述dropout层对于给定的测试输入x,用假设函数针对每一个类别估算出概率值;假设函数将要输出一个k维的向量来表示这个估计的概率值p,k为输出节点个数,即分类的个数,函数形式为:
9.根据权利要求8所述的一种导航传感器缓变故障智能主动容错方法,其特征在于,所述交叉熵损失函数为:
10.根据权利要求9所述的一种导航传感器缓变故障智能主动容错方法,其特征在于,所述缓变故障诊断模块训练的数据数据集为预测信号和量测信号之间的残差,由预测信号数据集与包含故障信息的量测导航信息数据集经过delta计算模块处理和残差处理得到,delta计算模块在预测信号数据处理时采用预测δ值代替预测真实导航信息,δ值为后一个采样点的导航信息减去前一个采样点的导航信息得到,残差信息经过顺序切分,将数据在纵向上按照窗口大小进行切分处理,对切分出来的矩阵进行标注。
技术总结
本发明公开了一种导航传感器缓变故障智能主动容错方法,包括:以长短期记忆神经元为基本单元搭建标准信号预测模块并训练,通过标准信号预测模块对导航信号进行预测;采用多层堆叠卷积神经网络模型搭建缓变故障诊断模块并训练,缓变故障诊断模块基于预测信号和量测信号之间的残差提取缓变故障趋势信息,在缓变故障发生初期且对系统影响在设定范围内实现对缓变故障的诊断;若诊断未发生缓变故障,采用量测信号作为导航信号,当诊断到缓变故障发生时,采用标准信号预测模块的预测信号作为导航信号,实现对导航信号缓变故障的主动容错。本发明可以有效预测激光雷达高度信息,解决了缓变故障诊断过慢和传统阈值法应用场景单一的问题。
技术研发人员:陈伟,尤润益,孙瑞胜,钱梦浩,陈子锴
受保护的技术使用者:南京理工大学
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!