砌筑机器人用平行度精调机构的制作方法
1.本实用新型涉及砌筑机器人领域,更具体地说,涉及砌筑机器人用平行度精调机构。
背景技术:
2.在使用砌筑机器人对墙体进行砌筑时,需要先对砌筑机器人的进行调平,当砌筑机器人整体与砌筑的墙体不平行时,则会导致砌筑墙体发生偏差,影响砌筑质量,现有技术公开号为cn215407523u的专利文献提供砌筑机器人用平行度精调机构,该装置包含有底座,底座上设置有轨道,滑动座滑动设置于轨道上;滑动座的两端设置有调节件;调节件包含有电机驱动的调节螺杆,底座上设置有调节支撑板。
3.虽然该装置有益效果较多,但依然存在下列问题:该装置仅能在x轴方向进行水平调节,然而地面不平整时的倾斜方向不一,该装置水平调节范围有限,实用性低。鉴于此,我们提出砌筑机器人用平行度精调机构。
技术实现要素:
4.1.要解决的技术问题
5.本实用新型的目的在于提供砌筑机器人用平行度精调机构,以解决上述背景技术中提出的问题。
6.2.技术方案
7.砌筑机器人用平行度精调机构,包括移动底座,所述移动底座上固定连接有固定柱a,所述固定柱a上转动连接有固定柱b,所述固定柱b上固定连接有连接板,所述连接板与移动底座之间设有两个交叉垂直排列的调节机构,所述调节机构包括与固定柱a转动连接的双向丝杠,所述双向丝杠两端均固定连接有转轮,所述双向丝杠两侧均螺纹配合有滑座,所述滑座与移动底座滑动连接,所述滑座上端转动连接有滑块,所述滑块两侧滑动接触有固定板,所述滑块两侧固定连接的滑杆与固定板上开设的斜孔滑动配合,所述固定板与连接板连接固定,所述连接板上固定连接有支架。
8.作为本申请技术方案的一可选方案,所述固定柱b下部固定连接有转动球,所述转动球与固定柱a转动连接。
9.作为本申请技术方案的一可选方案,所述滑座下部滑动连接有滑轨,所述滑轨与移动底座连接固定。
10.作为本申请技术方案的一可选方案,多个所述滑块转动轴心均与转动球的球心位于同一高度。
11.作为本申请技术方案的一可选方案,同一所述调节机构内的多个斜孔的倾斜方向一致。
12.作为本申请技术方案的一可选方案,所述连接板上安装固定有水平气泡仪。
13.3.有益效果
14.相比于现有技术,本实用新型的优点在于:
15.1、本申请技术方案通过双向丝杠转动时带动两个滑块相互靠近或远离,使得能够带动连接板向某一侧倾斜,两个垂直的调节机构配合可带动连接板进行任意方向的调节,从而使得本装置可带动砌筑机器人在任意场地下可调节至水平状态,实用性好。
16.2、本申请技术方案通过参考水平气泡仪的状态,快速得知连接板的倾斜方向,从而便于操作调节机构使得连接板快速调节水平,使用方便,有助于提高调节精度。
附图说明
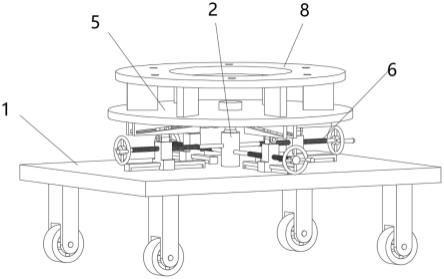
17.图1为本申请一较佳实施例中公开的砌筑机器人用平行度精调机构的整体结构示意图;
18.图2为本申请一较佳实施例中公开的砌筑机器人用平行度精调机构的固定柱a结构解剖示意图;
19.图3为本申请一较佳实施例中公开的砌筑机器人用平行度精调机构的固定柱a、连接板结构示意图;
20.图4为本申请一较佳实施例中公开的砌筑机器人用平行度精调机构的调节机构示意图;
21.图中标号说明:1、移动底座;2、固定柱a;3、转动球;4、固定柱b;5、连接板;6、调节机构;601、双向丝杠;602、转轮;603、滑座;604、滑块;605、滑杆;606、固定板;607、斜孔;7、滑轨;8、支架;9、水平气泡仪。
具体实施方式
22.请参阅图1-4,本实用新型提供一种技术方案:
23.砌筑机器人用平行度精调机构,包括移动底座1,移动底座1上固定连接有固定柱a2,固定柱a2上转动连接有固定柱b4,固定柱b4上固定连接有连接板5,连接板5与移动底座1之间设有两个交叉垂直排列的调节机构6,调节机构6包括与固定柱a2转动连接的双向丝杠601,双向丝杠601两端均固定连接有转轮602,双向丝杠601两侧均螺纹配合有滑座603,滑座603与移动底座1滑动连接,滑座603上端转动连接有滑块604,滑块604两侧滑动接触有固定板606,滑块604两侧固定连接的滑杆605与固定板606上开设的斜孔607滑动配合,固定板606与连接板5连接固定,连接板5上固定连接有支架8。
24.在本技术方案中,双向丝杠601转动时带动两个滑块603相互靠近或远离,滑杆605与斜孔607配合带动连接板5向某一侧倾斜,连接板5通过以固定柱a2与固定柱b4的连接处为圆心进行转动,两个垂直排列的调节机构6配合可带动连接板5进行任意方向的调节,实现全方位的水平调节。
25.具体的,固定柱b4下部固定连接有转动球3,转动球3与固定柱a2转动连接。
26.在这种技术方案中,转动球3与固定柱a2转动配合,使得连接板5可进行任意方向的转动。
27.进一步的,滑座603下部滑动连接有滑轨7,滑轨7与移动底座1连接固定。
28.在这种技术方案中,滑座603与滑轨7滑动配合,使得滑座603稳定滑动。
29.再进一步的,多个滑块604转动轴心均与转动球3的球心位于同一高度。
30.在这种技术方案中,连接板5以转动球3的球心进行转动,滑块604转动轴心与转动球3球心同一高度便于连接板5的转动。
31.更进一步的,同一调节机构6内的多个斜孔607的倾斜方向一致。
32.在这种技术方案中,两个滑块604相互靠近时,滑杆605与斜孔607配合带动连接板5向某一侧方向倾斜。
33.更进一步的,连接板5上安装固定有水平气泡仪9。
34.在这种技术方案中,水平气泡仪9为万向水准泡,通过水平气泡仪9内的气泡方位可得知连接板5的倾斜方向,从而便于调节连接板5至水平状态。
35.本申请所记载的砌筑机器人用平行度精调机构,当移动底座1处于不平整的地面时,连接板5倾斜,使得水平气泡仪9内的气泡方位偏移,转动连接板5倾斜一侧的转轮602,转轮602带动双向丝杠601转动,双向丝杠601转动时带动两个滑块603相互靠近或远离,滑杆605与斜孔607配合带动连接板5向倾斜一侧相反的方向转动,再转动另一组调结构6内的转轮602,使得可带动连接板5调节成水平状态。
技术特征:
1.砌筑机器人用平行度精调机构,包括移动底座(1),其特征在于:所述移动底座(1)上固定连接有固定柱a(2),所述固定柱a(2)上转动连接有固定柱b(4),所述固定柱b(4)另一端固定连接有连接板(5),所述连接板(5)与移动底座(1)之间安装有两个交叉垂直排列的调节机构(6),所述调节机构(6)包括与固定柱a(2)转动连接的双向丝杠(601),所述双向丝杠(601)两端均固定连接有转轮(602),所述双向丝杠(601)两侧均螺纹配合有滑座(603),所述滑座(603)与移动底座(1)滑动连接,所述滑座(603)上端转动连接有滑块(604),所述滑块(604)两侧滑动接触有固定板(606),所述固定板(606)上开设有斜孔(607),所述滑块(604)两侧均固定连接有滑杆(605),所述滑杆(605)与斜孔(607)滑动配合,所述固定板(606)与连接板(5)连接固定,所述连接板(5)上固定连接有支架(8)。2.根据权利要求1所述的砌筑机器人用平行度精调机构,其特征在于:所述固定柱b(4)下部固定连接有转动球(3),所述固定柱a(2)上部开设有转动球座,所述转动球(3)与固定柱a(2)上的转动球座转动连接。3.根据权利要求1所述的砌筑机器人用平行度精调机构,其特征在于:所述滑座(603)下部滑动连接有滑轨(7),所述滑轨(7)与移动底座(1)连接固定。4.根据权利要求2所述的砌筑机器人用平行度精调机构,其特征在于:多个所述滑块(604)转动轴心均与转动球(3)的球心位于同一高度。5.根据权利要求1所述的砌筑机器人用平行度精调机构,其特征在于:同一所述调节机构(6)内的多个斜孔(607)的倾斜方向一致。6.根据权利要求1所述的砌筑机器人用平行度精调机构,其特征在于:所述连接板(5)上安装固定有水平气泡仪(9)。
技术总结
本实用新型公开了砌筑机器人用平行度精调机构,属于砌筑机器人领域。砌筑机器人用平行度精调机构,包括移动底座,移动底座上固定连接有固定柱A,固定柱A上转动连接有固定柱B,固定柱B上固定连接有连接板,连接板与移动底座之间设有两个交叉垂直排列的调节机构,连接板上固定连接有支架。本申请技术方案通过双向丝杠转动时带动两个滑块相互靠近或远离,使得能够带动连接板向某一侧倾斜,两个垂直的调节机构配合可带动连接板进行任意方向的调节,从而使得本装置可带动砌筑机器人在任意场地下可调节至水平状态。可调节至水平状态。可调节至水平状态。
技术研发人员:聂璐璐 赵瑞增
受保护的技术使用者:聂璐璐
技术研发日:2022.06.09
技术公布日:2022/11/1
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1