一种水利无人船一体化岸边站的制作方法
本技术涉及水质检测,具体为一种水利无人船一体化岸边站。
背景技术:
1、水质监测是监视和测定水体中污染物的种类、各类污染物的浓度及变化趋势,评价水质状况的过程,水质监测的主要监测项目可分为两大类:一类是反映水质状况的综合指标,如温度、色度、浊度、ph值、电导率、悬浮物、溶解氧、化学需氧量和生物需氧量等;另一类是一些有毒物质,如酚、氰、砷、铅、铬、镉、汞和有机农药等,通常采用水质检测设备对水质进行检测,水质检测设备中设有水箱,水箱中设有传感器对水质进行检测,即岸边站,而现有技术为了岸边站可移动,也有将岸边站安装在无人船上的方式。
2、然而,传统的岸边站的水质检测过程中,通常需要将水体中的液体抽入水箱之中,在通过水箱中设有传感器对水质进行检测,但是传统的岸边站的水质检测过程只能通过单一水箱进行抽水检测,其再次进行水体检测时容易因内部的原有残留导致影响检测结果,并且若采用简易的多箱体切换检测时,则存在其水箱内部的传感器在多箱体切换时容易造成切换过程中的阻挡,影响多个箱体的转动换位的问题。
技术实现思路
1、本实用新型的目的在于提供一种水利无人船一体化岸边站,以解决上述背景技术中提出的能通过单一水箱进行抽水检测,其再次进行水体检测时容易因内部的原有残留导致影响检测结果以及传感器在多箱体切换时容易造成切换过程中的阻挡,影响多个箱体的转动换位的问题。
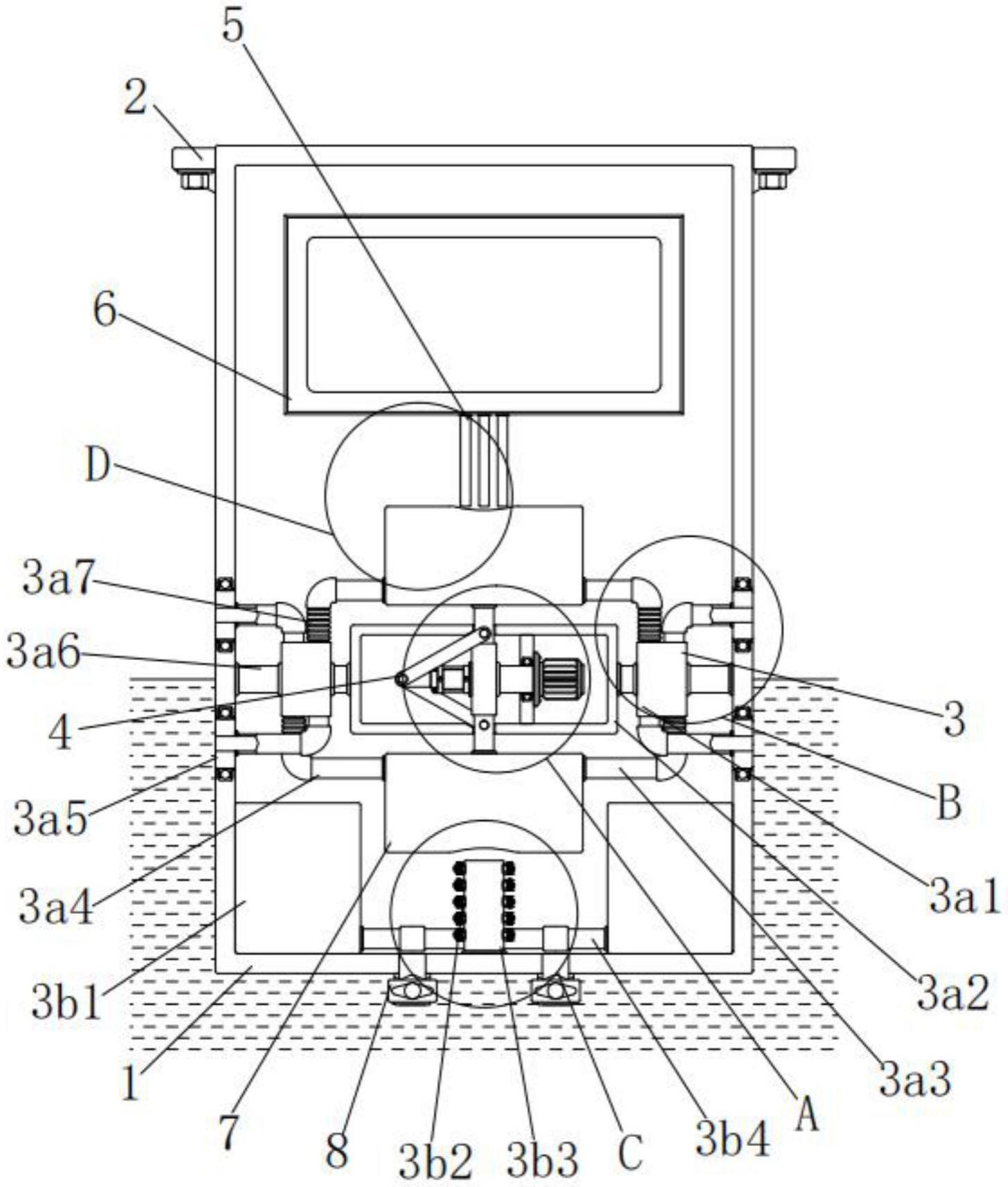
2、为实现上述目的,本实用新型提供如下技术方案:一种水利无人船一体化岸边站,包括外壳和耳板,所述外壳的内部上方安装有检测仪,所述检测仪的下端中心安装有传感器,所述外壳的内侧下方设置有转动组件,所述转动组件中框架处内部左侧设置有控制组件。
3、优选的,所述转动组件包括框架,所述框架的左右两端中心均通过支杆与外壳的内壁固定相连,所述支杆的外壁转动相连安装有水泵,两侧所述水泵的内部分别连通有多个进水管和排水管,所述进水管和排水管的内侧和外侧分别与箱体和套环固定连通,所述进水管和排水管的内侧末端安装有波纹管,所述套环的内外两侧均通过密封轴承与外壳转动相连,所述框架的内部右侧固接有电机,所述电机的输出轴固接有竖筒,所述竖筒的内部两侧均滑动相连有滑杆,所述滑杆的外侧末端与箱体固定相连。
4、优选的,所述外壳的外壁上方固接有多个耳板。
5、优选的,所述外壳的下端中心左右两侧均安装有排水阀。
6、优选的,所述控制组件包括气压缸,所述气压缸固接在竖筒的外壁左侧,所述气压缸的内壁贴合有气压杆,所述气压杆的末端外壁设置有斜杆,多个所述斜杆的两侧均通过销轴分别与气压杆和滑杆转动相连。
7、与现有技术相比,本实用新型的有益效果是:该水利无人船一体化岸边站:
8、通过水泵、进水管、电机、滑杆、竖筒和排水管之间的配合,水泵控制,将水流通过下方位置的进水管吸入,将水流吸入至上方的箱体内部,检测后可再通过排水管排出,而为了防止内部残留影响再次使用的检测,使用者可启动电机,使电机可通过竖筒和滑杆带动两侧的箱体翻转位置,如此即可避免了单个箱体用于水质检测时容易因内部的原有残留导致影响检测结果的问题;
9、通过传感器、箱体、斜杆、气压杆和气压缸之间的配合,传感器可对箱体内部水质进行检测,并通过检测仪进行分析,完成箱体的位置互换后,使用者即可通过气压缸控制,使气压杆可向内缩回,使气压杆可通过斜杆带动滑杆向外移动,使滑杆可带动箱体向外移动,此过程使上方的箱体可插入传感器的外壁,避免了插入箱体的传感器容易影响多个箱体的转动换位问题,防止出现切换阻挡的情况。
技术特征:
1.一种水利无人船一体化岸边站,包括外壳(1)和耳板(2),其特征在于:所述外壳(1)的内部上方安装有检测仪(6),所述检测仪(6)的下端中心安装有传感器(5),所述外壳(1)的内侧下方设置有转动组件(3),所述转动组件(3)中框架(3a2)处内部左侧设置有控制组件(4)。
2.根据权利要求1所述的一种水利无人船一体化岸边站,其特征在于:所述转动组件(3)包括框架(3a2),所述框架(3a2)的左右两端中心均通过支杆(3a6)与外壳(1)的内壁固定相连,所述支杆(3a6)的外壁转动相连安装有水泵(3a1),两侧所述水泵(3a1)的内部分别连通有多个进水管(3a3)和排水管(3a4),所述进水管(3a3)和排水管(3a4)的内侧和外侧分别与箱体(7)和套环(3a5)固定连通,所述进水管(3a3)和排水管(3a4)的内侧末端安装有波纹管(3a7),所述套环(3a5)的内外两侧均通过密封轴承与外壳(1)转动相连,所述框架(3a2)的内部右侧固接有电机(3a9),所述电机(3a9)的输出轴固接有竖筒(3a10),所述竖筒(3a10)的内部两侧均滑动相连有滑杆(3a8),所述滑杆(3a8)的外侧末端与箱体(7)固定相连。
3.根据权利要求1所述的一种水利无人船一体化岸边站,其特征在于:所述外壳(1)的外壁上方固接有多个耳板(2)。
4.根据权利要求1所述的一种水利无人船一体化岸边站,其特征在于:所述外壳(1)的下端中心左右两侧均安装有排水阀(8)。
5.根据权利要求1所述的一种水利无人船一体化岸边站,其特征在于:所述控制组件(4)包括气压缸(4a2),所述气压缸(4a2)固接在竖筒(3a10)的外壁左侧,所述气压缸(4a2)的内壁贴合有气压杆(4a4),所述气压杆(4a4)的末端外壁设置有斜杆(4a1),多个所述斜杆(4a1)的两侧均通过销轴(4a3)分别与气压杆(4a4)和滑杆(3a8)转动相连。
技术总结
本技术公开了一种水利无人船一体化岸边站,包括外壳和耳板,所述外壳的内部上方安装有检测仪,所述检测仪的下端中心安装有传感器,所述外壳的内侧下方设置有转动组件,所述转动组件中框架处内部左侧设置有控制组件。该水利无人船一体化岸边站,通过水泵、进水管、电机、滑杆、竖筒和排水管之间的配合,水泵控制,将水流通过下方位置的进水管吸入,将水流吸入至上方的箱体内部,检测后可再通过排水管排出,而为了防止内部残留影响再次使用的检测,使用者可启动电机,使电机可通过竖筒和滑杆带动两侧的箱体翻转位置,如此即可避免了单个箱体用于水质检测时容易因内部的原有残留导致影响检测结果的问题。
技术研发人员:周密,陈丽,曲晓帆,岳正国
受保护的技术使用者:中碧科技(江苏)有限公司
技术研发日:20220609
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!