一种抓手移板检测电路的制作方法
本技术涉及抓手检测,具体是一种抓手移板检测电路。
背景技术:
1、随着工业自动化技术的飞速发展,机械手的设计和发展变得越来越重要,尤其是对于在一些要求较高的工业环境中抓取复杂形状的物体时,需要更加灵活可靠的机械抓手进行操作,现有的机械抓手抓取物品单一,成本较高,虽然解决了一些问题,但还是难以满足市场的需要,而且,现有的仿生机械抓手通过固定的抓取程序对特定的移板进行抓取,机械抓手的自由度较低,在移动控制中容易出现不稳定的情况,因此有待改进。
技术实现思路
1、本实用新型实施例提供一种抓手移板检测电路,以解决上述背景技术中提出的问题。
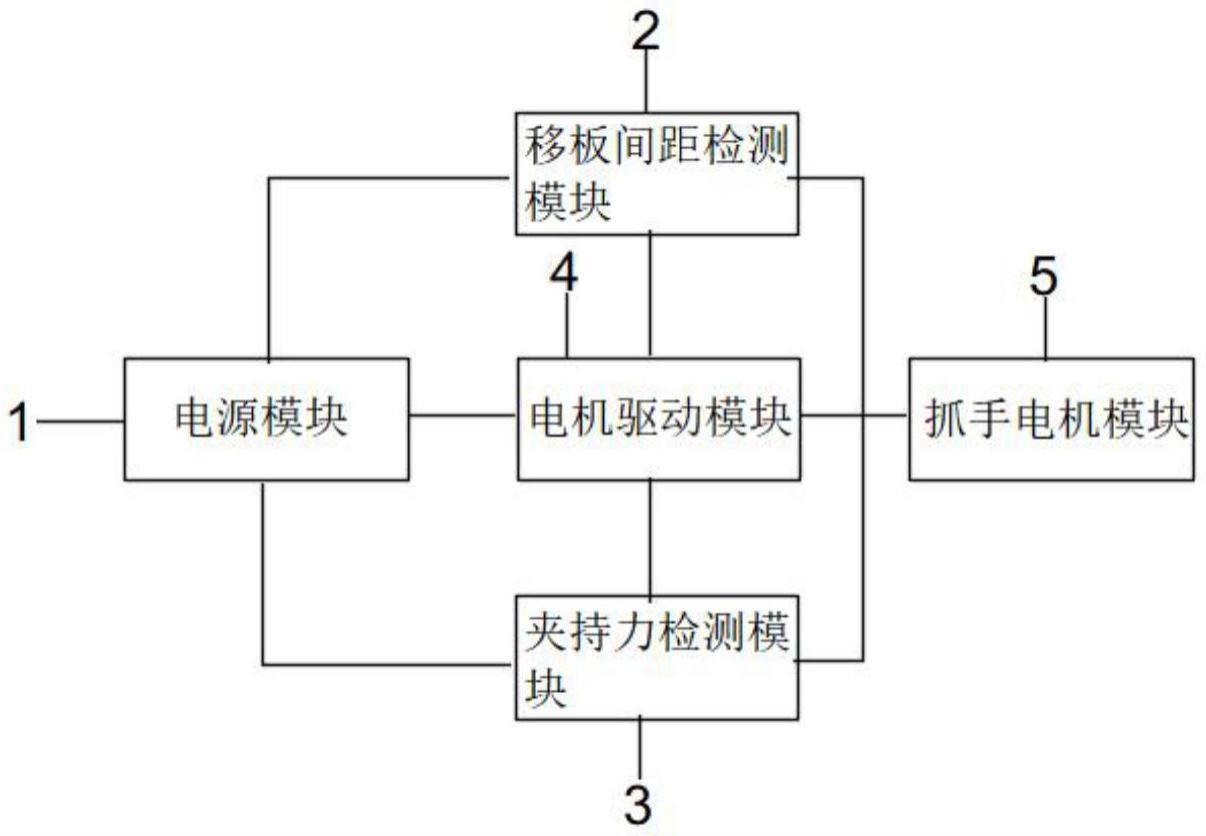
2、依据本实用新型实施例中,提供一种抓手移板检测电路,该抓手移板检测电路包括:电源模块,移板间距检测模块,夹持力检测模块,电机驱动模块和抓手电机模块;
3、所述电源模块,用于提供电能;
4、所述移板间距检测模块,与所述电源模块连接,用于发射红外信号,用于接收红外信号并进行两级放大,用于对放大后的红外信号进行采样,用于将采样的信号与设定的距离阈值进行比较并输出第一控制信号;
5、所述夹持力检测模块,与所述电源模块和移板间距检测模块连接,用于接收所述第一控制信号并控制电源的输入,用于检测抓手与移板之间的压力信息,用于检测压力信息与压力阈值进行比较并输出第二控制信号;
6、所述电机驱动模块,与所述电源模块、移板间距检测模块和夹持力检测模块连接,用于接收所述第一控制信号并输出占空比较窄的脉冲信号,用于接收所述第二控制信号并输出占空比较宽的脉冲信号;
7、所述抓手电机模块,与所述电机驱动模块连接,用于接收所述电机驱动模块输出的脉冲信号并控制抓手电机进行常规工作和慢速工作。
8、与现有技术相比,本实用新型的有益效果是:本实用新型抓手移板检测电路采用移板间距检测模块中的红外线测距电路完成对移板和抓手之间的间距的检测,在距离未达到设定的间距阈值时,移板间距检测模块将控制电机驱动模块输出常规的脉冲信号,以便抓手电机模块控制抓手的闭合,当达到所需间距阈值后,为抓牢移板,通过夹持力检测模块检测移板与抓手之间的压力情况,并通过压力阈值进行比较,并由抓手电机模块慢速控制电机转动,以便慢速控制抓手抓紧移板,无需固定的抓取程序进行抓手控制,且能够紧抓被抓物体,且该电路结构简单,成本低。
技术特征:
1.一种抓手移板检测电路,其特征在于,
2.根据权利要求1所述的一种抓手移板检测电路,其特征在于,所述移板间距检测模块包括第十七电阻、第十六电阻、第五开关管、第十五电阻、第四开关管、红外发射管、第十四电阻、第三二极管和第三电源;
3.根据权利要求2所述的一种抓手移板检测电路,其特征在于,所述移板间距检测模块还包括第一电阻、第一电源、红外接收管、第三电阻、第二电阻、第一运放、第四电阻、第二运放、第五电阻;
4.根据权利要求3所述的一种抓手移板检测电路,其特征在于,所述移板间距检测模块还包括第六电阻、第七电阻、第一比较器、距离阈值、第八电阻;
5.根据权利要求4所述的一种抓手移板检测电路,其特征在于,所述夹持力检测模块包括第二电源、第三开关管、第一电容、压力传感器、第十一电阻、压力阈值、第二比较器、第十电阻;
6.根据权利要求5所述的一种抓手移板检测电路,其特征在于,所述电机驱动模块包括第九电阻、第一开关管、第二开关管、第十二电阻、第一二极管、第二二极管,第二电容、第十八电阻、驱动器、第十三电阻、第一光耦、第三电容;
技术总结
本技术公开了一种抓手移板检测电路,涉及抓手检测技术领域,包括电源模块,用于供电;移板间距检测模块,用于发射和接收红外信号并进行放大处理,用于进行距离阈值比较;夹持力检测模块,用于检测抓手与移板间的压力信息并进行压力阈值比较;电机驱动模块,用于输出脉冲信号;抓手电机模块,用于控制抓手电机的进行常规和慢速工作。本技术抓手移板检测电路采用移板间距检测模块中的红外线测距电路完成对移板和抓手之间的间距的检测,在距离未达到设定的间距阈值时,抓手工作,当达到所需间距阈值后,为抓牢移板,利用夹持力检测模块检测移板与抓手之间的压力情况,通过压力阈值进行比较控制电机慢速转动,以便控制抓手抓紧移板。
技术研发人员:马瑞,谢清华,王波,温英利
受保护的技术使用者:山东省高精生物诊断分析产业技术研究院有限公司
技术研发日:20220708
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!