一种水下测量定位推杆装置的制作方法
1.本实用新型属于水下施工测量定位技术领域,尤其涉及一种水下测量定位推杆装置。
背景技术:
2.水下施工测量定位过程中,受现场测量条件限制,当两个待测目标即主动测量目标和被动测量目标的距离较远时,存在测量操作困难,测量精度不高的问题。且受水体浑浊度影响,当主动测量目标和被动测量目标距离较远时,主动测量目标很难清晰识别被动测量目标,从而使水下定位变得困难甚至失效。因此,亟需提供一种水下测量定位推杆装置,在遇到水体浑浊影响时,将主动测量目标与被动测量目标之间的距离拉进,降低水体浑浊对测量视线的影响,从而实现水下正常、精准定位。
技术实现要素:
3.本实用新型针对上述技术问题,提出一种水下测量定位推杆装置,该水下测量定位推杆装置结构简单,使用方便,使用时,将主动测量目标安装支架上,通过推杆拉进或调整与被动测量目标的距离,辅助完成被动测量目标的定位。
4.为了达到上述目的,本实用新型采用的技术方案为:
5.提供一种水下测量定位推杆装置,其包括:
6.支架;
7.滑轮组件,安装于所述支架内,所述滑轮组件内部形成有导向通道;
8.推杆,贯穿夹持于所述导向通道内,所述推杆的一端用以安装测量装置;
9.测量装置,可拆卸安装于所述推杆的一端;
10.驱动组件,安装于支架内且与所述推杆连接用以提供所述推杆的推进力;
11.编码器,安装于所述支架内,所述编码器实时记录所述推杆的推进行程。
12.本技术方案提供的水下测量定位推杆装置结构简单、使用方便,可实现水下非接触目标测量定位。当需进行测量定位时,将支架安装于主动测量目标上,当被动测量目标即待测目标在推杆的伸缩范围时,采用驱动组件控制推杆向待测目标移动,编码器实时记录行程,直至测量装置能有效测量待测目标,辅助完成待测目标的测量定位。
13.本技术其他一些实施例中,所述驱动组件包括步进马达和齿轮,所述齿轮固设于所述步进马达的输出端,所述推杆的一侧设置有与所述齿轮啮合的齿条;通过齿轮与齿条啮合实现步进马达驱动推杆推进或后退,简单方便。
14.本技术其他一些实施例中,所述滑轮组件包括上下对称设置的两个第一导向轮,所述第一导向轮的两端凸设有限位部,两个所述第一导向轮之间形成所述导向通道,所述推杆的顶部与底部分别抵接于两个所述第一导向轮;通过设置限位部使得推杆夹持于导向通道内,便于滑轮组件对推杆的固定与推进。
15.本技术其他一些实施例中,所述滑轮组件还包括左右对称设置的两个第二导向
轮,两个所述第二导向轮分别抵接于所述推杆的两侧;通过设置第二导向轮进一步使得推杆稳定夹持于导向通道内。
16.本技术其他一些实施例中,每个所述第一导向轮内部贯穿设置有转轴,所述转轴的两端分别连接有固定块,位于下方的两个固定块固设于所述支架内,位于上方的两个固定块分别通过调节轴对应安装于下方的两个固定块上;通过设置调节轴调节上方的固定块的上下位置,方便对推杆进行夹持。
17.本技术其他一些实施例中,水下测量定位推杆装置还包括底座,所述底座可拆卸连接于所述支架的底部。
18.本技术其他一些实施例中,所述支架的顶部设置有吊耳,方便水下安拆。
19.本技术其他一些实施例中,所述支架为采用不锈钢板材制成的矩形结构体,其耐腐蚀性高。
20.本技术其他一些实施例中,所述滑轮组件设置有两组,两组所述滑轮组件分别安装于所述支架的端部,通过设置两组滑轮组件保证了推杆直线推进。
21.本技术其他一些实施例中,所述推杆为不锈钢方管,所述不锈钢方管的截面的长度尺寸为40mm,宽度尺寸为80cm,厚度尺寸为2mm。
22.结合附图阅读本实用新型的具体实施方式后,本实用新型的其他特点和优点将变得更加清楚。
附图说明
23.图1为本实用新型实施例水下测量定位推杆装置的结构示意图;
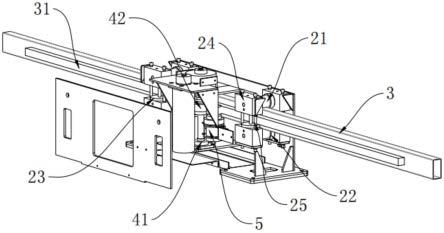
24.图2为本实用新型实施例水下测量定位推杆装置的部分爆炸图。
25.以上各图中:水下测量定位推杆装置100;支架1;吊耳11;滑轮组件2;第一导向轮21;限位部22;第二导向轮23;固定块24;调节轴25;推杆3;齿条31;驱动组件4;步进马达41;齿轮42;编码器5;底座6。
具体实施方式
26.下面,通过示例性的实施方式对本实用新型进行具体描述。然而应当理解,在没有进一步叙述的情况下,一个实施方式中的元件、结构和特征也可以有益地结合到其他实施方式中。
27.在本实用新型的描述中,需要说明的是,术语“内”、“外”、“上”、“下”、“前”、“后”等指示的方位或位置关系为基于附图所示的位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。
28.术语“第一”、“第二”、“第三”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”、“第三”的特征可以明示或者隐含地包括一个或者更多个该特征。
29.为了更好地理解上述技术方案,下面结合附图以及具体的实施方式对上述技术方案进行详细的说明。
30.参考图1,在本实用新型一种水下测量定位推杆装置100的一个示意性实施例中,
该水下测量定位推杆装置100包括支架1、滑轮组件2、推杆3、驱动组件4以及编码器5。
31.具体地说,参考图2,滑轮组件2安装于支架1内,且滑轮组件2内部形成有导向通道,推杆3贯穿夹持于导向通道内,推杆3的一端用以安装测量装置,驱动组件4安装于支架1内且与推杆3连接用以提供推杆3的推进力,编码器5安装于支架1内,编码器5实时记录推杆3的推进行程。
32.本实施例提供的水下测量定位推杆装置100结构简单、使用方便,可实现水下非接触目标测量定位。当需进行测量定位时,将支架1安装于主动测量目标上,当被动测量目标即待测目标在推杆3的伸缩范围时,采用驱动组件4控制推杆3向待测目标推进,编码器5实时记录推进行程,直至测量装置能有效测量待测目标,辅助完成待测目标的测量定位。
33.更具体地说,参考图1,本实施例中,支架1为采用不锈钢板材制成的矩形结构体,且其顶部设置有吊耳11,方便水下安拆。优选的,支架1采用厚度尺寸为8mm的316不锈钢材质制成,其耐腐蚀性高且支架1长度尺寸为800mm,宽度尺寸为200mm,高度尺寸为340mm。推杆3为不锈钢方管,所述不锈钢方管的截面的长度尺寸为40mm,宽度尺寸为80cm,厚度尺寸为2mm。优选的,推杆3为长度尺寸为3m的316不锈钢方管。
34.参考图2,驱动组件4包括步进马达41和齿轮42,齿轮42固设于步进马达41的输出端,推杆3的一侧设置有与齿轮42啮合的齿条31,通过齿轮42与齿条31啮合实现步进马达41驱动推杆3推进或后退,简单方便。优选地,本实施例中,齿条31为尼龙材质,且其长度尺寸为2.5m,该结构下的齿条31与齿轮42啮合使得推杆3的最大推进行程为2.4m。
35.继续参考图2,上述实施例中,滑轮组件2设置有两组,两组滑轮组件2分别安装于支架1的两端,通过设置两组滑轮组件2保证了推杆3直线推进。
36.具体地说,继续参考图2,滑轮组件2包括上下对称设置的两个第一导向轮21,第一导向轮21的两端凸设有限位部22,两个第一导向轮21之间形成导向通道,推杆3的顶部与底部分别抵接于两个第一导向轮21,通过设置限位部22使得推杆3夹持于导向通道内,便于滑轮组件2对推杆3的固定与推进。
37.优选地,上述实施例中,每个第一导向轮21内部贯穿设置有转轴,转轴的两端分别连接有固定块24,位于下方的两个固定块24固设于支架1内,位于上方的两个固定块24分别通过调节轴25对应安装于下方的两个固定块24上。通过设置调节轴25调节上方的固定块24的上下位置,方便对推杆3进行夹持。
38.进一步的,滑轮组件2还包括左右对称设置的两个第二导向轮23,两个第二导向轮23分别抵接于推杆3的两侧;通过设置第二导向轮23进一步使得推杆3稳定夹持于导向通道内。
39.参考图1,水下测量定位推杆装置100还包括底座6,底座6可拆卸连接于支架1的底部。使用时,主动测量目标通过底座6与支架1连接。本实施例中,底座6优选的通过螺栓与支架1的底部连接。
40.使用本实用新型提供的水下测量定位推杆装置100进行测量的测量方法,以测量装置为相机即以摄影测量方法为例,具体包括以下步骤:
41.1、将底座6安装在主动测量目标上,标定底座6与主动测量目标的空间相对位置关系;
42.2、将支架1安装于底座6上且固定好;
43.3、将推杆3的一端插入支架1一端的导向通道内,通过步进马达41将推杆3推进至支架1内,推进长度视现场待测距离而定;
44.4、在推杆3的一端安装防水相机;
45.5、当待测目标在推杆3的伸缩范围内时,启动步进马达41驱动推杆3向待测目标移动,编码器5实时记录推进行程,直至防水相机能有效测量待测目标,完成待测目标的定位。
46.以上所述,仅是本实用新型的较佳实施例而已,并非是对本实用新型作其它形式的限制,任何熟悉本专业的技术人员可能利用上述揭示的技术内容加以变更或改型为等同变化的等效实施例应用于其它领域,但是凡是未脱离本实用新型技术方案内容,依据本实用新型的技术实质对以上实施例所作的任何简单修改、等同变化与改型,仍属于本实用新型技术方案的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1