一种基于物联网的无人机跟踪定位系统
本技术涉及无人机,尤其涉及一种基于物联网的无人机跟踪定位系统。
背景技术:
1、无人机是一种功能复杂的无人化、智能化的系统平台,无人机根据飞行平台构型分类为旋翼无人机和固定翼无人机两类基本型以及一些变种型,大部分工业级、消费级的无人机产品的功能丰富、机载设备精密且价格昂贵,因此一台配送或者植保功能的旋翼无人机的价格都在几万元以上,而固定翼无人机、无人直升机的价格更是高达百万,所以无人机的安全问题是使用者首要考虑的因素之一,因此,现有的无人机大多安装有无人机跟踪定位系统来实现对无人机的保护。
2、目前大部分无人机跟踪定位系统都具有一定的飞行异常报警以及异常情况自动返回或者降落的基本功能,但是无人机一旦在超视距的情况下发生通讯丢失甚至异常坠毁,这些无人机跟踪定位系统本身自带的保护功能无法为搜寻工作提供帮助,同时,现有的系统大多采用黑匣子或定位盒子来实现对无人机的定位功能,导致现有的系统整体价格高、无法远程控制,同时无法判断无人机是否出现异常且无法远程控制,因此,本领域技术人员提供了一种基于物联网的无人机跟踪定位系统,以解决上述背景技术中提出的问题。
技术实现思路
1、本实用新型的目的是为了解决现有技术中存在的缺点,而提出的一种基于物联网的无人机跟踪定位系统,该系统在功能方面不仅可以实现自主判断飞行异常后发出报警指示以及将当前无人机位置实时发送到onenet平台,而且能够根据环境或者onenet平台指令进行实时报警,基于物联网的无人机跟踪定位系统核心芯片都使用低成本低功耗产品,从软硬件两个方面使基于物联网的无人机跟踪定位系统实现续航长、成本低、功能丰富。
2、为实现上述目的,本实用新型提供了如下技术方案:
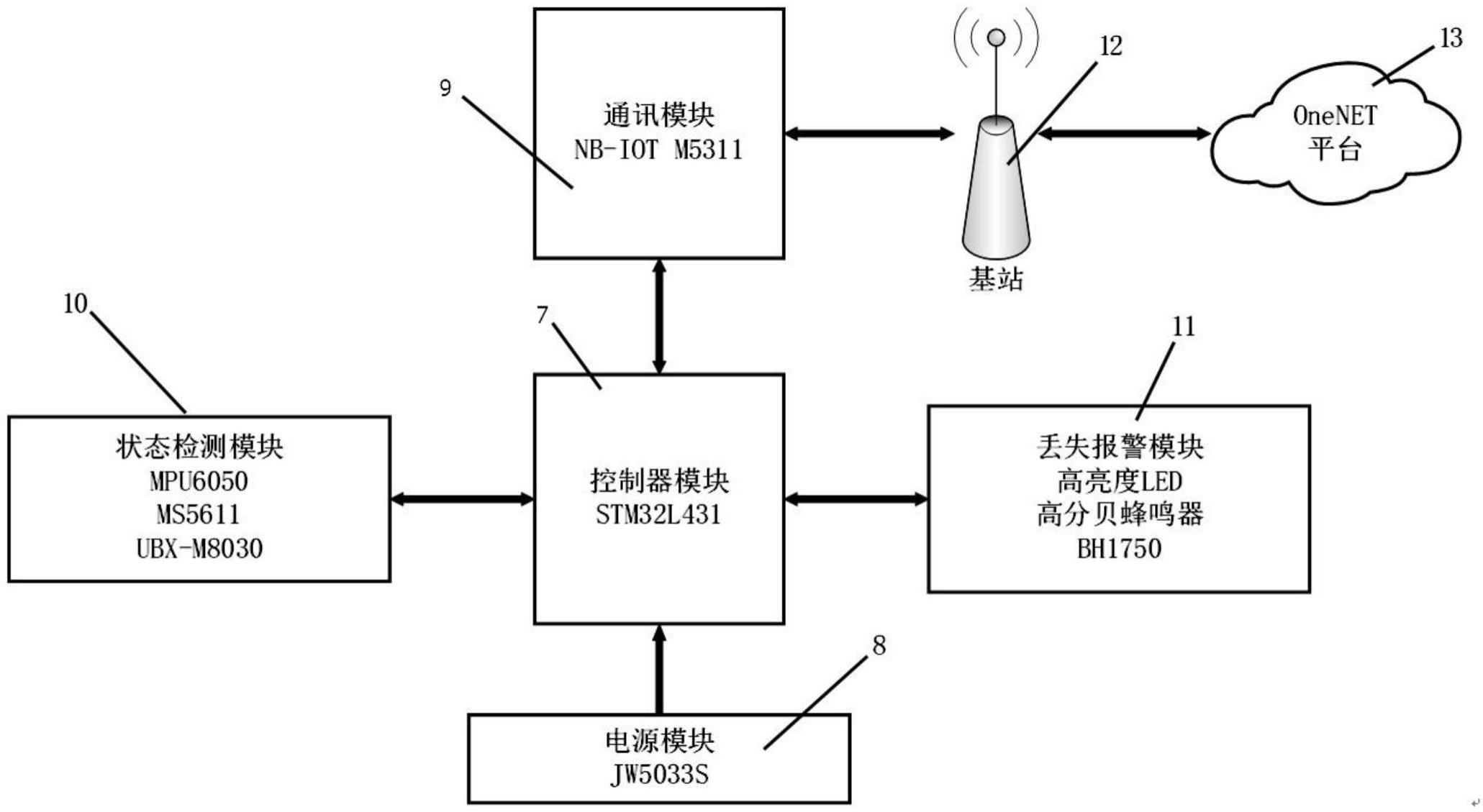
3、一种基于物联网的无人机跟踪定位系统,包括电源模块,所述电源模块连接有控制器模块,所述控制器模块双向连接有状态检测模块,所述控制器模块双向连接有丢失报警模块;
4、所述控制器模块双向连接有通讯模块,所述通讯模块双向连接有基站,所述基站双向连接有onenet平台;
5、通过上述技术方案,通过在系统内设置有电源模块,有利于为该无人机工作提供稳定的电力来源,通过在系统内设置有控制器模块,有利于实现该无人机基本的使用功能,通过在系统内设置有状态检测模块,有利于实现该系统对无人机状态进行实时检测,通过在系统内设置有丢失报警模块,有利于提升该无人机的防丢性能,通过将系统连接到基站和onenet平台,有利于实现该无人机基本的联网使用的功能。
6、进一步地,所述状态检测模块包括姿态检测模块、高度检测模块和gps定位模块,所述姿态检测模块、高度检测模块和gps定位模块之间通过线路板电性连接;
7、通过上述技术方案,有利于实时检测无人机的姿态状态以及位置数据,便于使用者及时发现无人机出现的姿态异常情况,确保使用者可以及时做出处理,避免无人机损坏造成损失。
8、进一步地,所述丢失报警模块包括高亮度led灯模块、高分贝蜂鸣器模块和环境光传感器模块,所述高亮度led灯模块、高分贝蜂鸣器模块和环境光传感器模块之间通过线路板电性连接;
9、通过上述技术方案,有利于在无人机丢失后及时进行报警提示周围人群,便于该无人机在白天和黑夜不同时间段进行判断和报警,提升该无人机的防丢性能。
10、进一步地,所述控制器模块核心为stm32l431rct6芯片,单片机主频80mhz,连接有256kbyte的flash,64kbyte的sram,三个i2c,三个spi,三个usart和一个低功耗uart;
11、通过上述技术方案,有利于协调该无人机内部的各部分组件进行工作,为该无人机进行各种功能的使用提供基础。
12、进一步地,所述电源模块核心为jw5033s电源芯片,提供电压3.3v,最大2a电流;
13、通过上述技术方案,有利于为该无人机进行使用提供持续且稳定的动力来源,提升该无人机的使用效果。
14、进一步地,所述通讯模块核心为m5311无线通信模块;
15、通过上述技术方案,通讯模块在psm模式下耗流为3ua,有利于该无人机通过通讯模块实现对b1、b3、b5、b8、b20、b28各个频段的支持。
16、进一步地,所述姿态检测模块核心为mpu6050芯片,所述高度检测模块核心为ms5611芯片,所述gps定位模块核心为ubx-m8030芯片;
17、通过上述技术方案,有利于该无人机实时检测无人机的俯仰角、横滚角、偏航角,便于实时检测无人机所处高度气压值,确保其可以实时接收gps信息。
18、进一步地,所述高亮度led灯模块核心为pt4211led恒流驱动器及1w高亮度led,所述高分贝蜂鸣器模块核心为sfm27高分贝蜂鸣器,所述环境光传感器模块核心为bh1750芯片;
19、通过上述技术方案,有利于该无人机发出高强度红光辅助精准位置搜寻,并产生高于85db的报警音量,用于辅助精准位置搜寻,确保其可以检测当前环境光亮度,用于判断当前环境是否处在白天黑夜。
20、本实用新型具有如下有益效果:
21、1、本实用新型提出的一种基于物联网的无人机跟踪定位系统,相较于现有的无人机跟踪定位系统,该无人机跟踪定位系统通过将其控制器模块和通讯模块设置为低功耗低成本的stm32l431rct6和中移物联m5311,将二者作为系统的控制模块核心和通讯模块核心,降低了该系统进行使用时的基本的功耗,进而实现降低该无人机系统整体的生产使用成本。
22、2、本实用新型提出的一种基于物联网的无人机跟踪定位系统,相较于现有的无人机跟踪定位系统,该无人机跟踪定位系统通过在其内部设置有状态检测模块,能够实时检测无人机的俯仰角、横滚角、偏航角,判断无人机是否处在异常飞行姿态,记录无人机所处的高度位置以及判断无人机高度变化趋势,解析无人机所处的经纬度,同时,该系统预留的接口也可以与无人机飞行控制器进行mavlink通讯,获取无人机的飞行状态以及电池电量,提高判断无人机异常状态的准确性。
23、3、本实用新型提出的一种基于物联网的无人机跟踪定位系统,相较于现有的无人机跟踪定位系统,该无人机跟踪定位系统通过在其内部设置有丢失报警模块,当无人机发生故障时,该系统可以实现在无人机丢失或者异常坠毁时自主判断当前异常状态并发出报警指示以及向onenet平台发送当前无人机位置信息,并能够根据环境或者onenet平台指令进行报警,提升该无人机的防丢性能。
技术特征:
1.一种基于物联网的无人机跟踪定位系统,包括电源模块(8),其特征在于:所述电源模块(8)连接有控制器模块(7),所述控制器模块(7)双向连接有状态检测模块(10),所述控制器模块(7)双向连接有丢失报警模块(11);
2.根据权利要求1所述的一种基于物联网的无人机跟踪定位系统,其特征在于:所述状态检测模块(10)包括姿态检测模块(1)、高度检测模块(2)和gps定位模块(3),所述姿态检测模块(1)、高度检测模块(2)和gps定位模块(3)之间通过线路板电性连接。
3.根据权利要求1所述的一种基于物联网的无人机跟踪定位系统,其特征在于:所述丢失报警模块(11)包括高亮度led灯模块(4)、高分贝蜂鸣器模块(5)和环境光传感器模块(6),所述高亮度led灯模块(4)、高分贝蜂鸣器模块(5)和环境光传感器模块(6)之间通过线路板电性连接。
4.根据权利要求1所述的一种基于物联网的无人机跟踪定位系统,其特征在于:所述控制器模块(7)核心为stm32l431rct6芯片,单片机主频80mhz,连接有256kbyte的flash,64kbyte的sram,三个i2c,三个spi,三个usart和一个低功耗uart。
5.根据权利要求1所述的一种基于物联网的无人机跟踪定位系统,其特征在于:所述电源模块(8)核心为jw5033s电源芯片,提供电压3.3v,最大2a电流。
6.根据权利要求1所述的一种基于物联网的无人机跟踪定位系统,其特征在于:所述通讯模块(9)核心为m5311无线通信模块。
7.根据权利要求2所述的一种基于物联网的无人机跟踪定位系统,其特征在于:所述姿态检测模块(1)核心为mpu6050芯片,所述高度检测模块(2)核心为ms5611芯片,所述gps定位模块(3)核心为ubx-m8030芯片。
8.根据权利要求3所述的一种基于物联网的无人机跟踪定位系统,其特征在于:所述高亮度led灯模块(4)核心为pt4211led恒流驱动器及1w高亮度led,所述高分贝蜂鸣器模块(5)核心为sfm27高分贝蜂鸣器,所述环境光传感器模块(6)核心为bh1750芯片。
技术总结
本技术涉及无人机技术领域,公开了一种基于物联网的无人机跟踪定位系统,包括电源模块,所述电源模块连接有控制器模块,所述控制器模块双向连接有状态检测模块,所述控制器模块双向连接有丢失报警模块,所述控制器模块双向连接有通讯模块,所述通讯模块双向连接有基站,所述基站双向连接有OneNET平台。本技术中,该系统在功能方面不仅可以实现自主判断飞行异常后发出报警指示以及将当前无人机位置实时发送到OneNET平台,而且能够根据环境或者OneNET平台指令进行实时报警,基于物联网的无人机跟踪定位系统核心芯片都使用低成本低功耗产品,从软硬件两个方面使基于物联网的无人机跟踪定位系统实现续航长、成本低、功能丰富。
技术研发人员:陈继伟,包长春,贾彬
受保护的技术使用者:内蒙古工业大学
技术研发日:20221026
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!