车辆外摆值组合检测装置的制作方法
1.本实用新型属于汽车检测技术领域,具体涉及一种车辆外摆值组合检测装置。
背景技术:
2.目前车辆外摆值普遍检测手段有两种:一种是滴水的方法,工作人员与车辆随行,在车辆外摆过程中人工控制滴水管,实时滴水,通过地面留下的水印痕迹,测量最外侧部位形成的投影线的最大距离尺寸,进而得出车辆外摆t值;但由于滴水过程中水滴不均、痕迹线宽不易控制,则稳定性差,精度比较低,滴水形成的水印痕迹受人为因素影响大,导致测量结果与实际的值之间存在一定的偏差。
3.第二种是画线方法,采用人员与车辆随行方式,人工控制画笔,用目测的方法,肉眼判断车辆行驶轨迹,同步车辆移动并在地面上画出行驶轨迹;然后直尺测量最外侧部位形成的投影线的最大距离尺寸,得出车辆外摆t值;但人工划线人为因素影响大,导致数据误差大,准确性不高。
技术实现要素:
4.本实用新型旨在提供一种车辆外摆值组合检测装置,测量精确度高,杜绝人为因素干扰,解决因采用滴水或人工画线的方法测量车辆外摆t值时导致人为影响因素大,测量数据误差大的问题。
5.为此,本实用新型所采用的技术方案为:一种车辆外摆值组合检测装置,车辆的行驶路径为由直线行驶过渡到直径d25m圆周内,且至少在圆周内行驶半圈,包括两台并列安放的激光投线仪、正面接受激光投线仪发射激光线的横向尺条和镜头对准横向尺条的摄像设备,所述激光投线仪之间的连线垂直于车辆初始直线行驶方向,两台激光投线仪上下间隔发射激光线且发射的激光线均能正好布满横向尺条,所述横向尺条的零刻度位于车辆初始直线行驶方向的线上,当车辆驶入并转向后,车尾部向外最大程度摆开时,两台激光投线仪发射的激光线均扫过车辆外摆尾部突出边沿处,并分别在横向尺条留下最大遮挡数值l1和l2,摄像设备用于进行实时数据捕捉记录,两台激光投线仪分别与对应最大遮挡数值的连线交点,就是车辆外摆时的最外侧部位抵达点,其投影对应横向尺条上的数值,即车辆外摆t值。
6.作为上述方案的优选,所述激光投线仪和横向尺条底部均设有升降台,保证横向尺条能接收激光投线仪发射的激光线,也能灵活调整两台激光投线仪的激光发射点位置呈上下间隔。
7.进一步优选为,所述车辆的行驶车速为5km/h~10km/h,有效保证车辆外摆t值的准确性,避免因车速过快或过慢导致车辆外摆值不准确。
8.进一步优选为,所述车辆外摆t值能通过在电脑距离计算软件上输入最大遮挡数值l1和l2及激光投线仪已知位置得出,操作简单方便快速得出t 值,有效避免人为因素干扰。
9.本实用新型的有益效果:
10.(1)相比于采用人工实时滴水显示车辆行驶轨迹和采用人工画笔同步画出行驶轨迹的方法,有效杜绝了人工操作带来的误差,有效提高了车辆外摆t 值的测量精准度,根据光的直线传播原理,根据激光投线仪在发射在横向尺条的激光线被车辆外侧尾部突出边沿处遮挡的最大值,计算出车辆外摆t值,构思巧妙。
11.(2)安装摆放简单快速,通过摄像设备快速捕捉激光投线仪的光线在横向尺条上变化点,快速捕捉最大遮挡数值l1和l2,全程自动化操作,有效避免人为因素影响,操作简单,测量快速。
12.综上所述,具有车辆外摆t值测量精准度高、构思巧妙、操作简单等优点。
附图说明
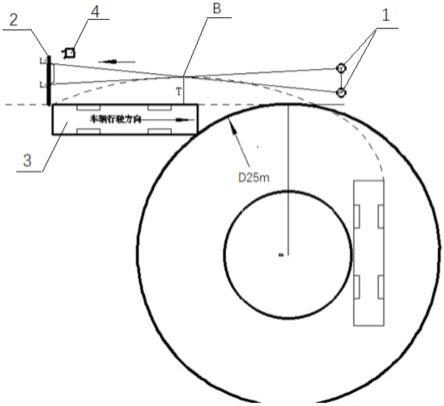
13.图1为本实用新型的运用示意图。
具体实施方式
14.下面通过实施例并结合附图,对本实用新型作进一步说明:
15.如图1所示,一种车辆外摆值组合检测装置,车辆3的行驶路径为由直线行驶过渡到直径d25m圆周内,且至少在圆周内行驶半圈,车辆3的行驶车速优选为5km/h~10km/h。
16.本系统由两台并列安放的激光投线仪1、正面接受激光投线仪1发射激光线的横向尺条2和镜头对准横向尺条2的摄像设备4组成。
17.激光投线仪1之间的连线垂直于车辆3初始直线行驶方向,两台激光投线仪1上下间隔发射激光线且发射的激光线均能正好布满横向尺条2。
18.横向尺条2的零刻度位于车辆3初始直线行驶方向的线上。
19.激光投线仪1和横向尺条2底部均设有升降台。
20.当车辆3驶入并转向后,车尾部向外最大程度摆开时,两台激光投线仪1 发射的激光线均扫过车辆3外摆尾部突出边沿处,并分别在横向尺条2留下最大遮挡数值l1和l2。
21.摄像设备4用于进行实时数据捕捉记录,两台激光投线仪1分别与对应最大遮挡数值的连线交点b,就是车辆3外摆时的最外侧部位抵达点,其投影对应横向尺条2上的数值,即车辆外摆t值。
22.车辆外摆t值能通过在电脑距离计算软件上输入最大遮挡数值l1和l2 及激光投线仪1已知位置得出。
23.具体实施步骤如下:
24.根据检测车辆的外侧尾部最大突出点的高度范围,通过升降台调节激光投线仪1的高度范围,以此作为测量外摆值的定位点;通过升降台调节横向尺条2能正面接收激光投线仪1的激光线。
25.开启激光投线仪1,分别将光线投射在横向尺条2上,间隔的双条线呈条形状态横向覆盖在整条横向尺条2表面,通过摄像设备4镜头清晰可见。
26.当车辆3由直线行驶接近d25m圆切入转向,此时车辆3尾部出现外摆,外摆的尾部遮挡部分激光投线仪1投射在横向尺条2的光线。
27.由于光的直线传播原理,随车辆3外摆增大,遮挡激光投线仪1的光线在横向尺条2
上消失光线逐渐增大,同时,摄像机4实时捕捉光线的在横向尺条2上变化点;
28.捕捉到激光投线仪1投射在直尺出现最大遮挡位置l1值和l2值。
29.将上述数值整理,两个激光投线仪1的坐标点作为输入数据,借助上位机电脑距离计算软件,在两台激光投线仪1位置已知的条件下,连线横向尺条2 上形成的l1、l2极值对应点,快速得出车辆外摆t值。
技术特征:
1.一种车辆外摆值组合检测装置,车辆(3)的行驶路径为由直线行驶过渡到直径d25m圆周内,且至少在圆周内行驶半圈,其特征在于:包括两台并列安放的激光投线仪(1)、正面接受激光投线仪(1)发射激光线的横向尺条(2)和镜头对准横向尺条(2)的摄像设备(4),所述激光投线仪(1)之间的连线垂直于车辆(3)初始直线行驶方向,两台激光投线仪(1)上下间隔发射激光线且发射的激光线均能正好布满横向尺条(2),所述横向尺条(2)的零刻度位于车辆(3)初始直线行驶方向的线上,当车辆(3)驶入并转向后,车尾部向外最大程度摆开时,两台激光投线仪(1)发射的激光线均扫过车辆(3)外摆尾部突出边沿处,并分别在横向尺条(2)留下最大遮挡数值l1和l2,摄像设备(4)用于进行实时数据捕捉记录,两台激光投线仪(1)分别与对应最大遮挡数值的连线交点(b),就是车辆(3)外摆时的最外侧部位抵达点,其投影对应横向尺条(2)上的数值,即车辆外摆t值。2.根据权利要求1所述的一种车辆外摆值组合检测装置,其特征在于:所述激光投线仪(1)和横向尺条(2)底部均设有升降台。3.根据权利要求1所述的一种车辆外摆值组合检测装置,其特征在于:所述车辆(3)的行驶车速为5km/h~10km/h。4.根据权利要求1所述的一种车辆外摆值组合检测装置,其特征在于:所述车辆外摆t值能通过在电脑距离计算软件上输入最大遮挡数值l1和l2及激光投线仪(1)已知位置得出。
技术总结
本实用新型公开了一种车辆外摆值组合检测装置,车辆的行驶路径为由直线行驶过渡到直径D25m圆周内,且至少在圆周内行驶半圈,包括两台并列安放的激光投线仪、正面接受激光投线仪发射激光线的横向尺条和镜头对准横向尺条的摄像设备,所述激光投线仪之间的连线垂直于车辆初始直线行驶方向,两台激光投线仪上下间隔发射激光线且发射的激光线均能正好布满横向尺条,所述横向尺条的零刻度位于车辆初始直线行驶方向的线上,当车辆驶入并转向后,并分别在横向尺条留下最大遮挡数值L1和L2,具有联合管片结构稳定、泄流量大、降压效果好、设计参数精确等优点,具有车辆外摆T值测量精准度高、构思巧妙、操作简单等优点。操作简单等优点。操作简单等优点。
技术研发人员:于飞 周金应 陈雄 王锐 计京宝 邓高攀 王麒源
受保护的技术使用者:中汽院(重庆)汽车检测有限公司
技术研发日:2022.10.26
技术公布日:2023/1/19
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1